翁德沃彭:
- 一般停车协助
- 停车距离控制
- 倒车摄像头
- 侧面图
- 环视
- 停车辅助
一般停车协助:
停车辅助包括帮助驾驶员进出停车场的系统。 最广为人知的停车辅助系统是“停车距离控制”,缩写为PDC。 该系统可以告知车辆驾驶员与后车的距离,或者通过广泛的系统还可以告知车辆前部的距离。 本页介绍了现代技术,这些技术要么是停车距离控制的延伸,要么是完全独立的辅助系统。
停车距离控制:
停车距离控制 (PDC) 是一种距离警告系统,可在进出停车位时测量信号并提供有关障碍物距离的信息。 后保险杠上有超声波传感器,前保险杠上通常也有超声波传感器(见图)。 它们发出人耳无法察觉的频率非常高的声波。 这些超声波频率从附近的物体反射并被传感器接收。 传感器测量发送和接收这些信号之间的时间。 物体越近,信号反弹得越快。 传感器捕获它并将其传递到 PDC 控制单元(计算机)。
该计算机可以将其以音频信号以及图像和声音信号的形式传输给驾驶员。 然后会听到嘟嘟声,随着物体越来越近,嘟嘟声变得越来越快。 在大约 30 厘米的距离处,它会发出持续的蜂鸣声,告诉您作为驾驶员必须停车。

现代机载计算机通常配备一个选项,可以在屏幕上显示到物体的距离。 PDC传感器相同; 控制单元计算来自传感器的数据并将其处理成屏幕可以显示的信息。
下图显示了 PDC 控制单元 (ECU)。 这个灰色方块包含微控制器、放大器和一个与门。 微控制器传输频率约为 40 kHz(黑色)的方波电压。 还周期性地输出低频块电压(红/蓝)。 与门接收两个模块电压。 当两个电压都很高时,输出电压(与门右侧)也很高。 当两个电压之一低时,输出也变低。 输出电压被发送回微控制器和 PDC 传感器中的发射器。 发射器以大约 300 m/s 的速度发射超声波信号。 当附近有物体时,超声波会反射并被接收器记录。 我们称之为“三角测量”。 接收器将形成的块信号发送至ECU。 使用放大器放大块信号,然后由微控制器处理。
从与门和放大器接收输出信号之间的时间是到物体距离的度量。 PDC传感器与物体之间的距离越小,时间越短。 微控制器控制蜂鸣器或通过CAN总线与其他控制单元通信。
下面的电路图 (VAG) 显示了控制单元、开关输入和蜂鸣器等输出之间的通信。
PDC控制单元(J446)通过CAN总线接收行驶速度和倒车信号。 PDC 控制单元通过连接 T12/11 将调制块电压发送到连接到所有 PDC 传感器(G86、G203、G334 和 G335)的电缆接头(后保险杠中的 X206)。 每个 PDC 传感器都有自己的信号线(通过引脚 2)连接到 ECU。 此外,每个传感器的接地连接至接地焊缝(352)。
当一个或多个传感器检测到物体时,控制单元会激活蜂鸣器 (H15)。 根据与物体的距离,蜂鸣器发出更快或更慢的间歇声音信号。

通过与诊断接口 (J533) 进行通信,可以执行以下诊断功能:
- 查询故障记忆
- 调整控制单元的编码(例如,在前面使用 PDC 传感器扩展系统后或安装牵引杆后)
- 调节蜂鸣器音量
- 询问测量值块,其中包括所有传感器到物体的距离、计算出的距离以及发射器和接收器的稳定时间。
倒车摄像头:
除了停车距离控制外,停车辅助还可以配备倒车摄像头。 当驾驶员将车辆挂入倒档或按下车内按钮时,车辆后部的摄像头就会启动。 通常收音机或车载计算机的屏幕会显示该图像。
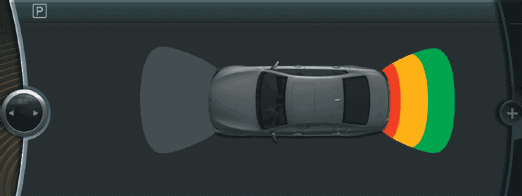
下图显示了 BMW 显示屏,图像位于车辆后部。 摄像机图像的右侧是一辆车辆,其前后都有三部分网格; 这显示了 PDC 传感器记录到的物体的距离。
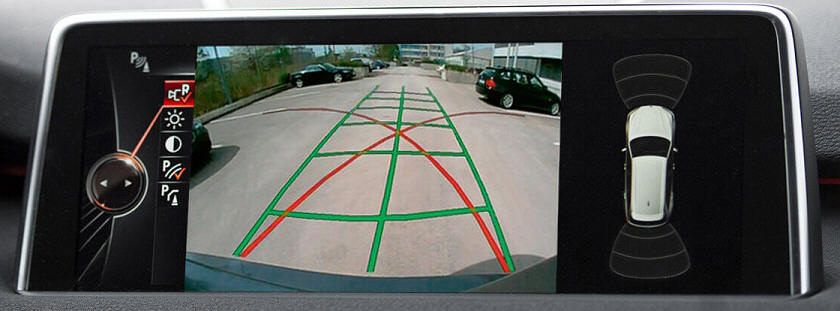
在倒车摄像头图像中可以看到红色和绿色的线条。 红线表示车辆可以转向的可能方向; 在最大转向时,车轮将沿着弯道外侧的红线行驶。 绿色网格沿着车把转动的方向; 此时前轮笔直向前。 当驾驶员转动方向盘时,绿线表示实际行驶路线。 转向角传感器记录方向盘的位置。
倒车摄像头有时很明显,通常位于车牌和/或打开尾门的把手附近。 有时制造商会选择将相机安装在视线之外。 下图显示了大众高尔夫的倒车摄像头,电动机使大众标志倾斜以将摄像头向外移动。 当您再次向前行驶时,标志会自动折回。 不仅将相机放置在视线之外,镜头也不易脏。

侧面图:
当您在两辆车或大型物体之间倒车时,您必须向前行驶一点才能左右查看。 使用侧视摄像头(也称为角视图),这要容易得多; 前保险杠左右两侧的摄像头将图像发送到仪表板的屏幕上。 该图像显示了角落摄像机的视图。 不幸的是,摄像头不能安装在隐形的地方。 配备侧视摄像头的汽车保险杠上(通常)有一个黑色镜头。 下图显示了带有左侧摄像头的宝马前保险杠。


环视视图:
最豪华的停车辅助系统无疑包括“环视”,也称为俯视、3D或鸟瞰。 每个品牌都为系统赋予了自己的名称和特征。 我们现在使用名称“环绕视图”。
通过环视视图,汽车的顶部显示在屏幕上。 看起来好像有一个摄像头正在观察车顶及其周围区域。 汽车是一个模拟的,环境是由几个(通常是四个)摄像头组成的记录的。
以下三幅图像(来自 BMW)显示了驾驶员看到的图像。 停车时,停车位与柱子等物体的分离清晰可见。 倒车时,可以放大后方; 在这里你主要可以看到植物。 传统的 PDC 传感器记录到植物的距离。 计算机用红色标记该距离。

向前停车时,系统还可以显示周围情况和前方情况。 PDC 传感器现在还可以帮助确定到围栏的距离。

如果驾驶员不小心,沿着路边平行停车可能会导致轮胎和轮辋损坏。 环视视图现在也提供了解决方案; 由于可以清楚地看到街景,您可以直接停车并靠近路边。 BMW 的最新开发成果使得反转摄像头图像并模拟车辆成为可能。

接下来的三张图片显示了相机经常放置的地方。



停车协助:
作为停车辅助的延伸,所谓的“停车外辅助”可以在视野有限的情况下向后离开停车位时为驾驶员提供帮助。 这可能是在车辆停在墙边或车辆之间的情况下。
汽车后部的传感器检测到车辆后方经过的交通,并可能造成碰撞风险。 这包括以一定速度接近车辆的所有移动物体。 当停车辅助系统检测到有车辆驶近时,信息娱乐系统显示屏上会出现一条消息。 通常会添加声音信号。 如果驾驶员忽略这些信号并向后行驶,系统会通过操作制动器进行物理干预,使车辆减速。
