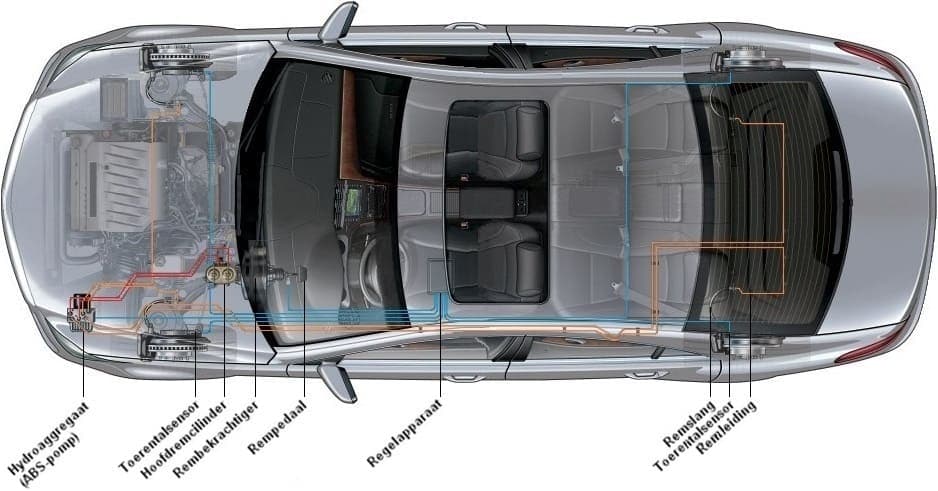
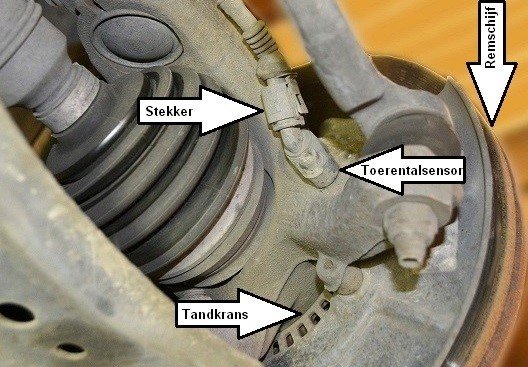
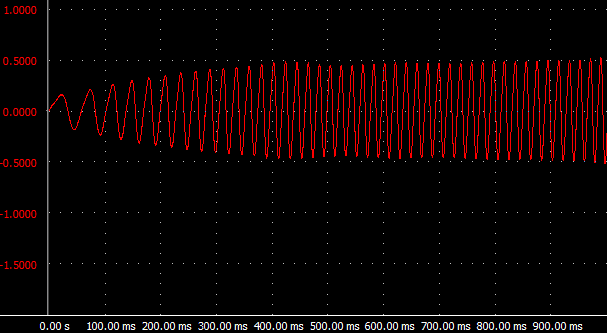
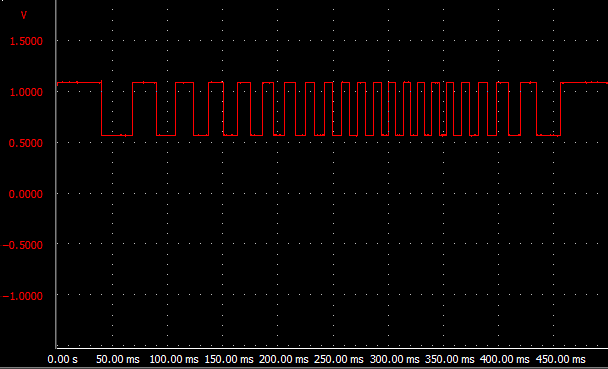
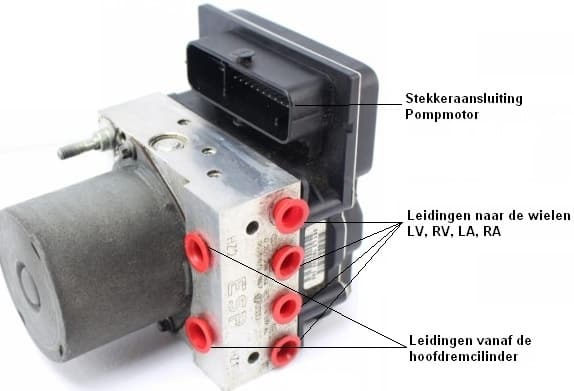
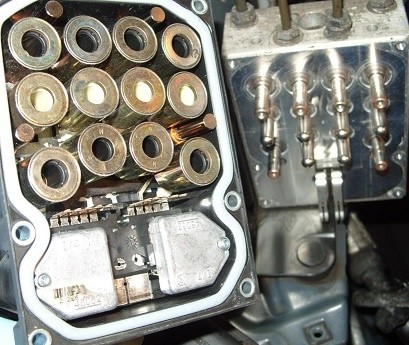
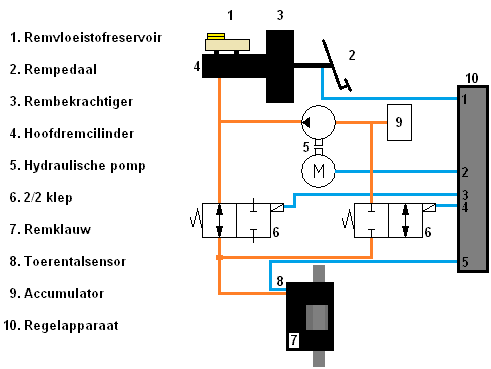
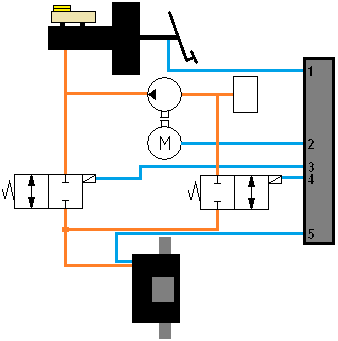
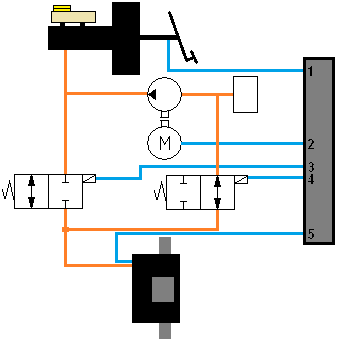
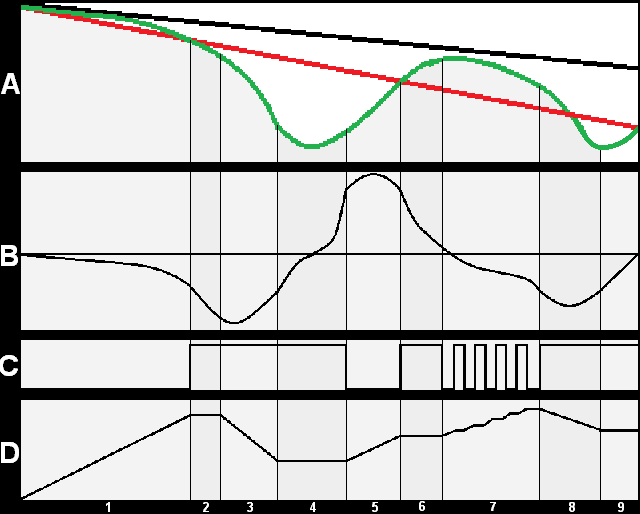
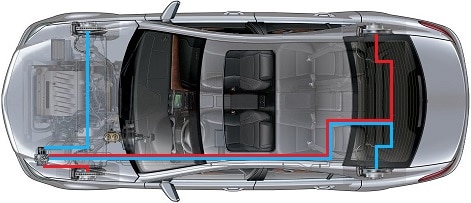
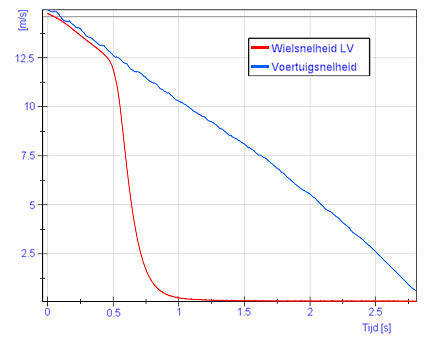
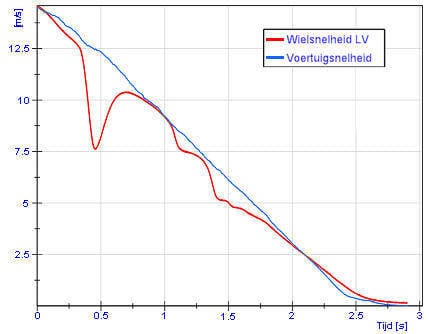
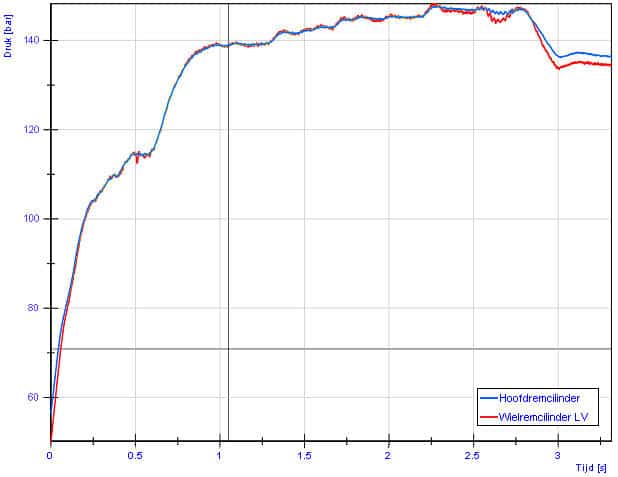
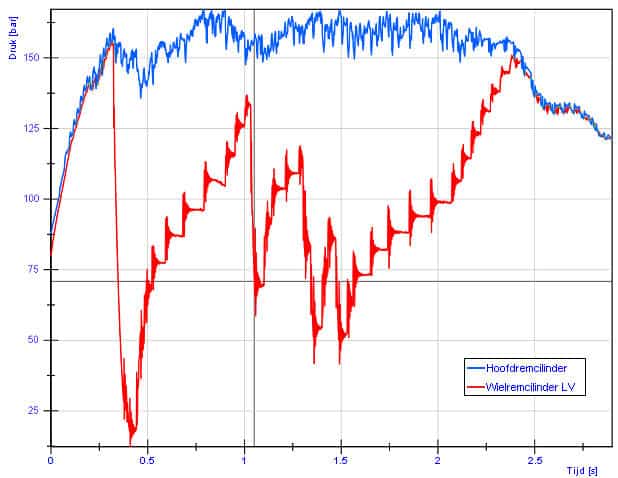
ABS 翁德沃彭:历史目标Werking速度传感器水力骨料液压回路ABS控制循环防止μ分裂的控制原理带和不带 ABS 的车辆的测量 历史:ABS(防抱死制动系统的缩写)早在1961年,轮胎制造商Dunlop就在Ferguson P99一级方程式赛车上成功试验了ABS。 大约十四年前,“普通”汽车上引入了类似的技术。 现在所有的新车都配备了ABS。 用途:ABS 的目的是在行驶时利用轮胎与路面之间的最大附着力。 ABS 还确保保持行驶稳定性。 这包括:转向稳定性:当ABS激活时,车辆保持可转向。 车轮打滑时,车辆会向一个方向滑动,并且转向运动无法传递到路面。路线稳定性:如果车轮锁死,车辆可以采取不同的路线。 例如,后轮受阻会导致车辆绕其轴线旋转,从而导致车辆在道路上向后倒退。 手术:制动系统负责制动车轮。 在任何情况下都不应将车轮抱死,因为这样车轮就会失去对路面的抓地力。 然后车轮在沥青上滑动,这意味着无法再传递转向运动。 在这种情况下,车辆将无法控制。 ABS 系统可防止车轮卡住。当车轮有锁死危险时,ABS 系统会确保减少该车轮上的制动压力(车轮制动缸上的制动液压力)。 在那一刻,无论你用脚多用力踩刹车踏板都没有关系。 ABS 系统调节制动压力,防止车轮打滑。 在某一点上,ABS系统会逐渐再次建立压力,因为车轮当然必须尽可能地制动。 如此持续直至再次达到滑移极限; 然后压力再次降低。 这个过程需要几毫秒。 然后可以感觉到制动踏板有振动。 经常会听到 ABS 泵的声音。下图显示了 ABS 系统组件的概览。 上图显示了两个红色管道。 它们从主制动缸延伸至液压装置。 Hydroaggregate 是 ABS 泵的另一种说法。 两条红线与独立制动系统有关; 左前与右后,右前与左后。 例如,如果左前轮出现泄漏,导致制动液全部泄漏,您仍然可以使用另一个制动回路进行制动。 橙色管道从液压装置延伸到所有车轮。 在液压装置中,可以调节每个车轮的制动力。每个车轮上都安装有速度传感器。 这样可以连续监控所有四个轮子的速度。 蓝线是连接到速度传感器的信号线。 信号线从每个车轮连接到控制单元。 来自制动踏板和液压装置的信号也传送至控制单元。 在所示的汽车中,它位于汽车内部的座椅下方。 如今,您越来越多地看到控制单元连接到液压单元。 那么它就是一个整体。 如果系统出现故障,例如由于传感器有缺陷或脏污、电缆有缺陷或液压装置有缺陷,仪表板上的故障灯将会亮起。 然后可以使用诊断设备读取故障。 速度传感器:下图显示了处于安装状态的感应式速度传感器。 这是前悬架上的麦弗逊支柱的照片。 此处还可以看到传感器测量速度的齿轮环。 ABS 传感器可以设计为电感传感器(见上图)、磁阻传感器(MRE 传感器)或霍尔传感器(见右图)。 该传感器的操作显示在页面上 霍尔传感器 描述。 后一种传感器用于 ABS 磁环,该磁环位于 车轮轴承 已处理。来自电感式和霍尔传感器的信号可与 示波器 被测量。 下面显示并描述了这些测量的示例。 感应式速度传感器:感应式速度传感器由永磁体及其周围的线圈组成。 当齿环(附在驱动轴上)的齿穿过永磁体的磁场时,磁场强度会发生变化。 磁场的变化导致线圈中产生电压。 速度信号中的每个周期对应于牙齿经过传感器。 环上的齿数和驱动轴的转速决定了信号的频率和幅度。 霍尔传感器:此外,对于磁阻传感器(MRE 传感器)或霍尔传感器,带有磁铁的金属环会沿着传感器移动。 磁环位于 传动轴 或在其中 车轮轴承。 块电压的频率取决于金属环的转速和齿数。 幅度(信号的高度)保持不变。 MRE 传感器需要电源才能运行。 然而,这些传感器通常只有两根电线(因此有两个连接)。 传感器通过负极电缆将信号发送至 ABS 控制单元。 由于半导体板暴露在变化的磁场中时电阻会发生变化,因此形成了信号。来自速度传感器的信号被传输到 ABS 控制单元。 来自四个车轮的信号相互比较。 当车辆驶过弯道时,内侧弯道车轮的速度会低于外侧弯道车轮的速度。 这是经过测量的,但当然完全在裕度范围内。如果制动时速度相差太大,ABS控制单元将确保液压单元降低相关车轮上的制动压力(制动太猛)。 如果加速时速度差太大,发动机功率会被发动机管理系统突然降低。如果 ABS 系统出现故障,可以使用示波器测量信号。 这些可以在方向盘上测量,也可以在控制装置上测量。 通过测量方向盘,您可以检查 ABS 传感器是否正常工作。 当在控制单元上进行测量时,可以排除接线缺陷是否是故障的原因。测量过程中可以检查电感式传感器的频率和幅度是否正确。 使用霍尔传感器,您可以检查车轮转动时信号的频率是否正确。 为此,请将轮旋转一圈,以便快速识别牙齿中的任何缺陷。 对于损坏的牙齿,传感器信号的纯度会出现偏差(想象一下每次旋转的频率都比预期的要宽)。 水力骨料:左下图显示了带有内置控制装置的水力发电机。 这可以从插头连接中的大量引脚看出。从主制动缸到车轮的管道连接也在这里可见。 独立的制动回路(左前与右后、右前与左后)均集成在该泵装置中。当我们拆开液压装置时,可以看到阀块。 右下图显示了水力发电机的内部。 液压回路:下面的液压图显示了液压装置内部和周围的组件。 要了解操作、部件和符号,请查看页面 水力学基本原理 进行咨询。下图是针对一个轮子绘制的。 数字 5、6 和 9 是内部数字。 另一个轮子使用相同的组件,除了 2/2 阀门 (6) 之外,只是连接方式不同。 换句话说,如果画出整车的图,旁边就会有六个2/2阀门,每个阀门都有自己的管道。 为了清楚起见,现在仅显示一个制动电路的图表。 情况1:无制动稳定:右图为无制动且稳定的情况。 踩下制动踏板 (2),使制动主缸 (4) 向左 2/2 阀 (6) 施加液压。 该 2/2 阀与制动钳 (7) 具有开放式连接。 由于制动钳的液压增加,制动片将压向制动盘。 然后将施加制动。 速度传感器 (8) 记录车轮的转数。 情况2:ABS激活,保持制动压力:该图显示了猛烈制动且车轮减速度过大时的情况。 制动器处的 ABS 传感器已向控制单元的端子 5 传输速度信号,该信号低于其他车轮的速度信号。 控制单元对此做出响应并关闭制动钳系统。 具体操作如下:向控制装置的引脚 3 施加一定的电流,从而为左侧 2/2 阀门上的电磁阀通电。 克服弹簧力将阀门推向左侧。 这会阻止新制动液进入制动钳。 右侧 2/2 阀保持在相同位置,因此制动液无法流向制动器或返回。 这使压力保持恒定。 控制单元再次检查有问题的车轮与其他车轮之间的速度差是否相差太大。 如果相互速度差极小,或者由于制动压力已保持恒定而不再存在速度差,则控制单元将再次从引脚3移除电流。 2/2 阀门弹回其原始位置,因此情况 1 再次适用。 如果速度差没有变化,甚至变得更大,则必须减小相关车轮的制动压力。 这种情况发生在情况 3 中。 情况3:ABS启动,降低制动压力:为了降低制动压力,必须将制动液泵入 2/2 阀和制动钳之间的管路中。 这是在上图中完成的。现在引脚 4 也通电,从而使右侧 2/2 阀门通电。 现在它也移到左侧位置,释放制动钳和液压泵之间的通道。 此时泵电机将转动,将制动液从制动钳泵送到主缸。 现在,流体克服主制动缸的力被泵回储液器。 压力减小,车轮将再次开始转动。 总之:情况1适用于轻驾驶和轻制动时。 在制动过程中,车轮可能会抱死,即情况 2,而由于车轮卡住而必须降低压力,即情况 3。在制动过程中,情况会不断变化。 如果情况 3 适用,即制动液被泵离制动器,则必须再次制动车轮。 否则车辆将无法足够有力地制动。 然后,驾驶员切换回情况 1,然后再次切换到情况 2,然后再次切换到情况 3。这种情况会一直发生,直到驾驶员停止制动,或者直到他或她在不同的路面上行驶,例如,更硬的路面(更高的摩擦系数) 。 ABS控制循环:下图显示了 ABS 的控制周期。 添加了各种因素,例如车速 (A) 与轮速、轮周加速度 (B)、系统活动 (C) 和制动压力 (D)。该图也分为9个时间段。 每个时期都有明显的变化,因为制度在调整。 该时间段总共约为20毫秒,分为9个不等的块。 图表下方是线条的解释。 A: 黑线是车速,绿线是车轮速度,红线是参考速度。 车速降低(周期 1),但车轮速度降低得更快。 红色参考线被切断。 当绿线最终低于红线时(从第 2 期开始),车轮可能会打滑。 因此,ABS 将进行干预。B: 该线表示车轮圆周加速度。 举个例子:转动方向盘并缓慢减速,B 处的线仍接近零线。 现在以相同的速度转动方向盘并更用力地制动,线路将进一步向下延伸。 当加快速度时也会发生这种情况; 如果您从 0 公里/小时快速转动方向盘到 10 公里/小时,如果您需要 5 秒才能将方向盘从 0 公里/小时转动到 10 公里/小时,那么线会进一步上升。 简而言之,这就是车轮圆周加速度。C: 这条线表示系统中压力稳定的位置; 然后 ABS 开始工作。 当 C 处的线较低(零线)时,ABS 系统不工作。 在第7时段,ABS被脉动控制,使得轮速不会下降得太快。D: 这条线表示制动压力。 制动压力不断增加,直到绿色车轮速度线 (A) 与红色参考线相交。 ABS 开始工作(C)并确保车轮圆周加速度不会变得太低。 轮周加速度在第4时段处于零线处; 恰好是(A)中车轮速度从负值变为正值的时刻。 此时压力保持恒定。 在第 7 期,脉动控制清晰可见。 现在小心地增加制动压力,以免车轮制动太快。 防止μ分裂的控制原则:可以使用此信息针对每个车轮单独设置 ABS。 轮速传感器记录每个车轮的速度。 这是必要的,因为在所有情况下,必须权衡可实现的最大摩擦系数与车辆的操纵性。 当车辆左轮在干燥的沥青路面上、右轮在软路肩上行驶并且施加最大制动力时,车辆将失去控制并沿其轴线转动。 沥青路面和冰面上车轮制动力的差异会产生偏航力矩,从而导致偏离路线。 这种情况称为μ分裂情况。 µ 发音为“mu”。 为了防止这种情况,应用了许多控制原则:单独控制(IR):制动压力设置为每个车轮的最大摩擦系数。 这可能会导致偏航力矩较大,但可以实现最大制动力。选择低控制(SL):具有最低摩擦系数的车轮决定另一个车轮的制动压力。 未使用可达到的最大制动力,但横摆力矩较低。选择高控制(SH):具有最高摩擦系数的车轮决定另一个车轮的制动压力。 select-high方案仅用于ASR方案。选择智能或修改控制:制动期间,控制从低选择变为单独控制。 这允许在横摆力矩和最大制动力之间实现折衷。 该方案常应用于商用车。通常客车的制动系统是对角分离的(左十字)。 下图显示了一个示例。 这显示了左前和右后的红色制动系统以及右前和左后的蓝色制动系统。 前轮的制动由单独控制装置(IR)控制。 一个前轮的制动压力设置为另一个前轮的最大摩擦系数。 在紧急停止期间,前轮将单独搜索可实现的最大制动力。后轮的制动器根据低速选择 (SL) 原理进行控制。 摩擦系数最小的后轮的调节制动压力决定了另一个后轮的制动压力。 两个后轮的制动扭矩将保持相同。 带和不带 ABS 的车辆的测量:为了更好地了解 ABS 系统对车辆的影响,本节显示了两个测量图表,展示了不带 ABS 和带 ABS 的制动车辆之间的差异。 车速相对于不带 ABS 的轮速:右图显示了车速与轮速的比较。 从 t = 0 秒开始,车辆速度为每秒 15 米。 此时制动踏板被踩到最大。 其间车速线性降低至 0 m/s t = 2,75 和 3,00 秒。 在 t = 0,5 到 1,0 秒之间,车轮速度完全降至 0 m/s。 这意味着车轮的速度已经为 0 m/s,因此它是静止的,而车辆仍在移动。 就在这时,一个轮子被挡住了。 当车辆尚未静止时,车轮在路面上打滑。 在这种情况下,ABS 不工作。 车速相对于带 ABS 的轮速:右图中,蓝线是相同的; 车速为 15 m/s 时,最大制动速度为 0 m/s。 这会在 3 秒内再次发生。 现在 ABS 开始工作,t = 0,3 秒时的红线并没有下降到 0 m/s,但车轮的速度再次增加。 这可以从在 t = 0,5 秒之前首先下降并再次上升的红线看出。 当车速为 7,5 m/s 时,ABS 会降低制动压力。 其他车轮的速度等于车速,因此也等于蓝线。 左前轮的 ABS 传感器记录减速度。 ABS 计算机识别出速度差异,从而进行干预。 液压装置降低制动压力,直到蓝线和红线再次相同。 此时,制动压力再次保持恒定。 直到车辆停下来,ABS 继续控制打滑车轮的速度。 主制动缸中的压力与不带 ABS 的车轮制动缸中的压力相比:施加在制动踏板上的力通过液体位移转换成制动主缸中的制动压力。 该制动压力如下图的蓝线所示。无论车轮是否打滑,车轮制动缸中的制动压力(红线)都保持与主制动缸中的压力相同。 所以这就是没有ABS的情况。 主制动缸中的压力与带 ABS 的车轮制动缸中的压力相比:在ABS开始工作的情况下,主制动缸和车轮制动缸中的压力不再相等。 由于驾驶员一直踩下制动踏板,因此主制动缸中的压力仍然很高。 图中红线在 t = 0,3 秒时减小; 此时 ABS 会降低制动压力。 制动压力的降低导致车轮再次滚动。 从t = 0,4秒开始,制动压力再次逐渐增加,直到车轮的速度与其他车轮相同。 这是 t = 2,35 秒时的情况。