Перетворення напруги аналогового датчика в цифрове повідомлення
Перетворення сигналу генератора імпульсів у цифрове повідомлення
Вихідні сигнали
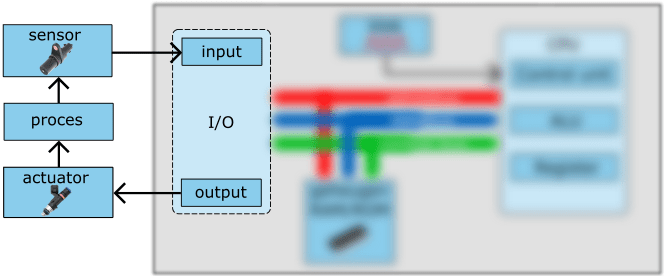
Вступ: У більшості випадків електричні сигнали від датчиків повинні бути налаштовані до того, як вони подадуться на процесор. Виконавчі механізми управляються з іншого боку комп’ютера. Часто це індуктивні кола, які часто комутують великі струми. Апаратне забезпечення для регулювання сигналів датчиків і струмів приводу називається інтерфейсними схемами. Інтерфейсна схема забезпечує переведення аналогової напруги в цифрову.
Датчики передавати напругу з малим струмом. Схема інтерфейсу перетворює напругу в цифрове значення (0 або 1). Сила струму низька при сигналі датчика;
Актуатори вимагають більшого струму. До приводи керування, розташовані в ECU у вигляді (комбінації) транзисторів або польових транзисторів, які також називаються «драйверами». Більш детально ми розглянемо це в розділі «вихідні сигнали».
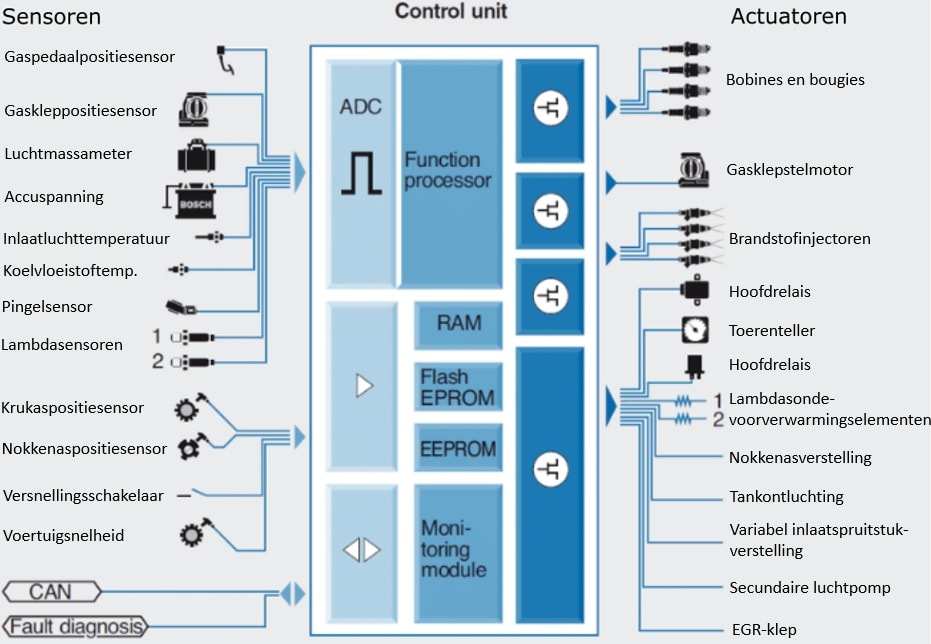
На зображенні нижче показано датчики та виконавчі механізми системи керування (бензиновим) двигуном. Верхня група датчиків (від датчика положення педалі акселератора до лямбда-зондів) відноситься до категорії «аналогових». Це означає, що вхідна напруга датчика повинна бути спочатку оцифрована в АЦП (аналогово-цифровий перетворювач). Нижня група датчиків (від датчика положення колінчастого вала до датчика швидкості автомобіля) вже подає свій сигнал у цифровому вигляді. Сигнали ввімкнення-вимкнення або напруги блоку подаються безпосередньо до ЦП.
Приводи праворуч керуються вихідним каскадом. Вихідний каскад, також званий драйвером, складається зі схеми з кількох транзисторів для генерування корисної напруги та струму з керуючого імпульсу від комп’ютера для керування виконавчим механізмом.
Система управління двигуном з датчиками (ліворуч) і виконавчими механізмами (праворуч)
Транзисторна транзисторна логіка (TTL): Процесор працює з напругою 5 вольт. Тому вхідна та вихідна напруги обмежені діапазоном від 0 до 5 вольт (рівень TTL, скорочено від Transistor Transistor Logic). Для сигналів, які відхиляються від цього рівня напруги, коригування відбувається в схемі інтерфейсу.
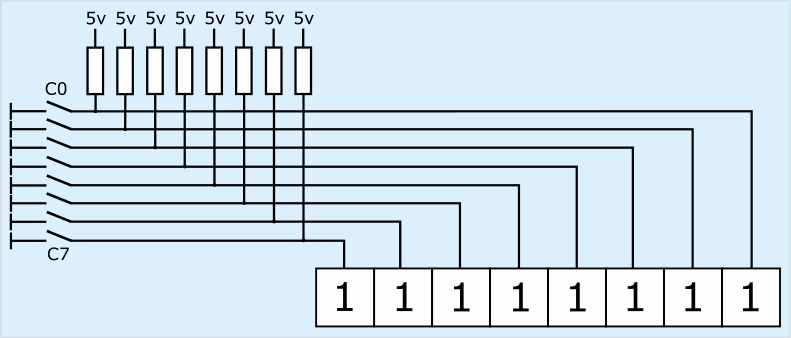
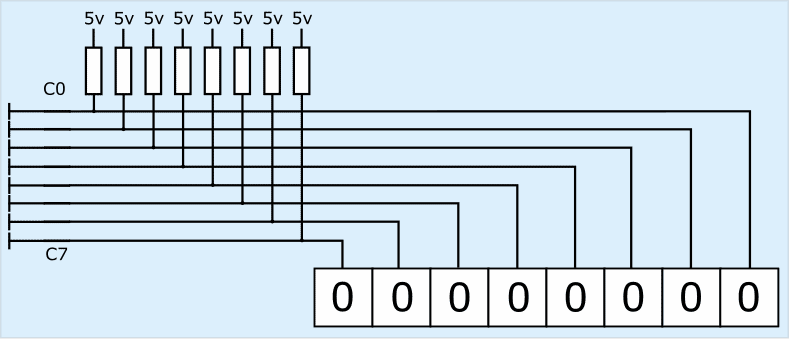
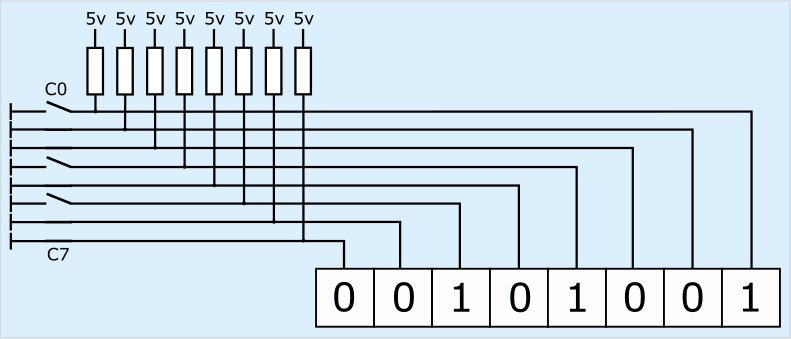
На зображеннях нижче показано, як утворюється 1 або 0 із положення перемикача. За допомогою підтягуючого резистора напруга 5 вольт забезпечує a логічний 1 на вході процесора при розімкнутому перемикачі. Тоді напруга на підтягувальному резисторі не буде підключена до землі. Коли перемикачі замикаються, на підтягувальному резисторі відбувається падіння напруги. Напруга 0 вольт на вході процесора розглядається як логічний 0.
Усі перемикачі розімкнуті: 11111111 на вході процесора
Усі перемикачі закрито: 00000000 на вході процесора
Комбінація відкритих і закритих перемикачів створює серію одиниць і нулів. На малюнку 8-бітне повідомлення для процесора: 00101001.
У 8-розрядному процесорі вісім бітів зчитуються одночасно за цикл. Під час наступного циклу, який відбувається під час наступного «тикання» годинника (див системна шина на сторінці про роботу ECU) слідує послідовність із восьми нових бітів.
Розімкнуті та закриті перемикачі: 00101001 на вході процесора
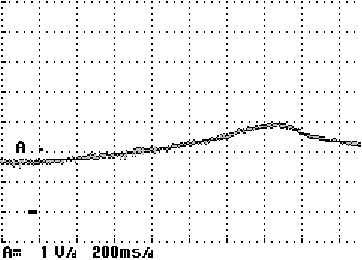
Перетворення напруг аналогового датчика в цифрове повідомлення: Цифрові вхідні сигнали обробляються безпосередньо процесором. Аналогові сигнали спочатку перетворюються в цифровий сигнал в АЦП. Як приклад візьмемо аналогову криву напруги датчика тиску турбонаддува:
на холостому ході напруга становить приблизно 1,8 вольт;
при розгоні напруга зростає майже до 3 вольт.
Зміна напруги не може бути оброблена безпосередньо в процесорі. Спочатку виміряна напруга повинна бути перетворена в десяткове значення (від 0 до 255).
З діапазоном від 0 до 5 вольт і десятковим значенням від 0 до 255 (тому 256 можливостей). Простий розрахунок показує, що якщо ми розділимо 5 вольт на 256 можливостей, можна зробити кроки по 19,5 мВ (0,0195 вольт).
Наведений вище приклад показав зміну напруги в залежності від часу датчика тиску турбіни. Крива напруги датчика температури і датчика положення педалі акселератора однакові, тільки в різні часові рамки: нагрівання охолоджуючої рідини займає більше часу, ніж намотування турбіни.
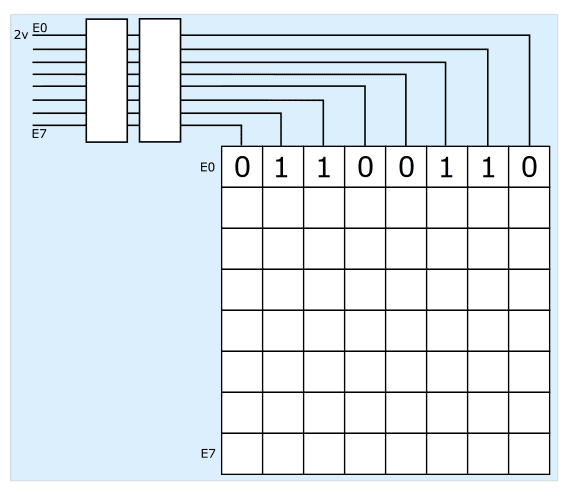
Раніше в цьому розділі є зображення, яке показує категорію аналогових сигналів. Це показує, серед іншого, датчик температури та датчик положення педалі газу. Аналогова напруга перетворюється на 8-бітну одиницю інформації в АЦП. Багато процесорів з кількома вхідними контактами мають лише один аналого-цифровий перетворювач. Кілька аналогових сигналів об'єднуються в один сигнал за допомогою мультиплексування.
У цьому прикладі ми бачимо аналого-цифровий перетворювач із вісьмома входами. На виводі 0 є напруга 2 вольта. На контакти від E1 до E7 можна подавати напругу одночасно. Вони один за одним перетворюються в цифрове повідомлення за допомогою мультиплексування.
Напруга 2 вольта перетворюється на двійкове значення. За допомогою наступної формули ми можемо перетворити аналогову напругу в десяткове значення, а потім перетворити його в двійкове значення:
2v / 5v * 255d = 102d
Тут ми ділимо вхідну напругу (2 В) на максимальну напругу (5 В) і множимо це на максимальне десяткове значення (255).
Зробивши деякі обчислення або виконавши хитрий трюк, ми можемо перетворити десяткове число 255d у двійкове значення 01100110. Перегляньте сторінку для цього: двійковий, десятковий, шістнадцятковий.
8-розрядний АЦП
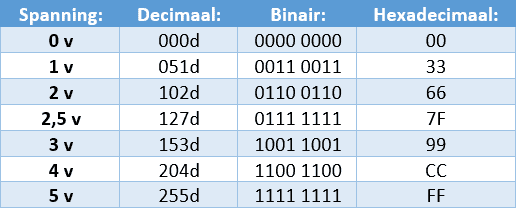
У наступній таблиці показано десяткові, двійкові та шістнадцяткові значення, пов’язані з різними напругами.
Під час зчитування живих даних може відображатися десяткове, двійкове або шістнадцяткове значення сигналу датчика.
Сигнал напруги <0,5 вольт (025d) вважається коротким замиканням на землю;
Якщо сигнал піднімається вище 4,5 вольт (220d), комп'ютер перекладає це як коротке замикання на плюс.
Напруга в десятковій, двійковій і шістнадцятковій системах
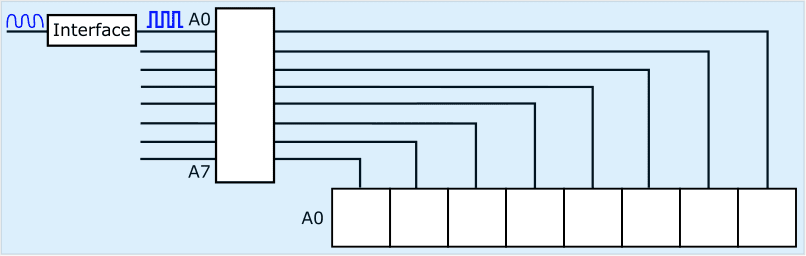
Перетворення сигналів генератора імпульсів в цифрове повідомлення: Сигнали від генераторів імпульсів, включаючи індуктивний датчик положення колінчастого вала, насправді є сигналами включення-виключення, які виникають після того, як зубці імпульсного колеса перемістилися повз датчик. Змінна напруга датчика повинна спочатку бути перетворена в прямокутну напругу перед подачею сигналу процесору.
На малюнку ми бачимо синусоїдальну змінну напругу на лівій стороні інтерфейсу. В електроніці інтерфейсу ця змінна напруга перетворюється на прямокутну напругу. Ця напруга блоку потім зчитується блоком таймера/лічильника: коли імпульс високий, лічильник починає підрахунок і припиняє підрахунок, коли імпульс знову стає високим. Кількість відліків є мірою часу періоду. частота сигналу.
Перетворення сигналу генератора імпульсів в цифровий сигнал блоком таймера/лічильника
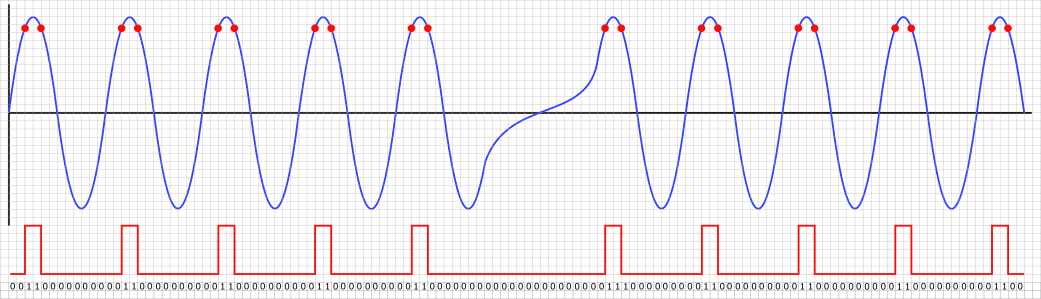
На зображенні нижче ми бачимо сигнал від індуктивного датчика колінчастого вала з червоними крапками у верхній частині. Червоні точки встановлюються на напругу для збільшення (логіка 1) або зменшення (логіка 0) напруги блоку. Пояснення продовжується під цим зображенням.
Синусоїдальна змінна напруга і оцифрований сигнал без гістерезису
Однак напруга датчика ніколи не буває абсолютно чистою. У профілі напруги завжди будуть невеликі коливання. У цьому випадку електроніка інтерфейсу може неправильно вказати це як логічний 0, тоді як насправді це має бути 1.
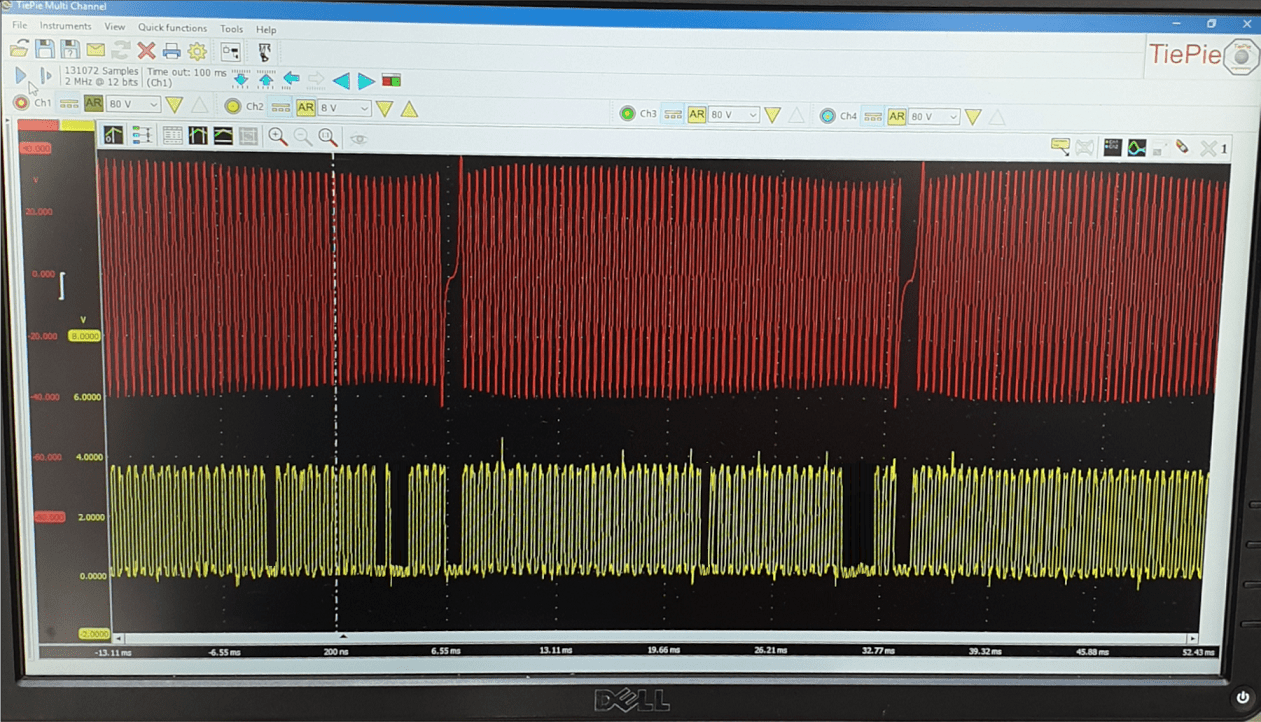
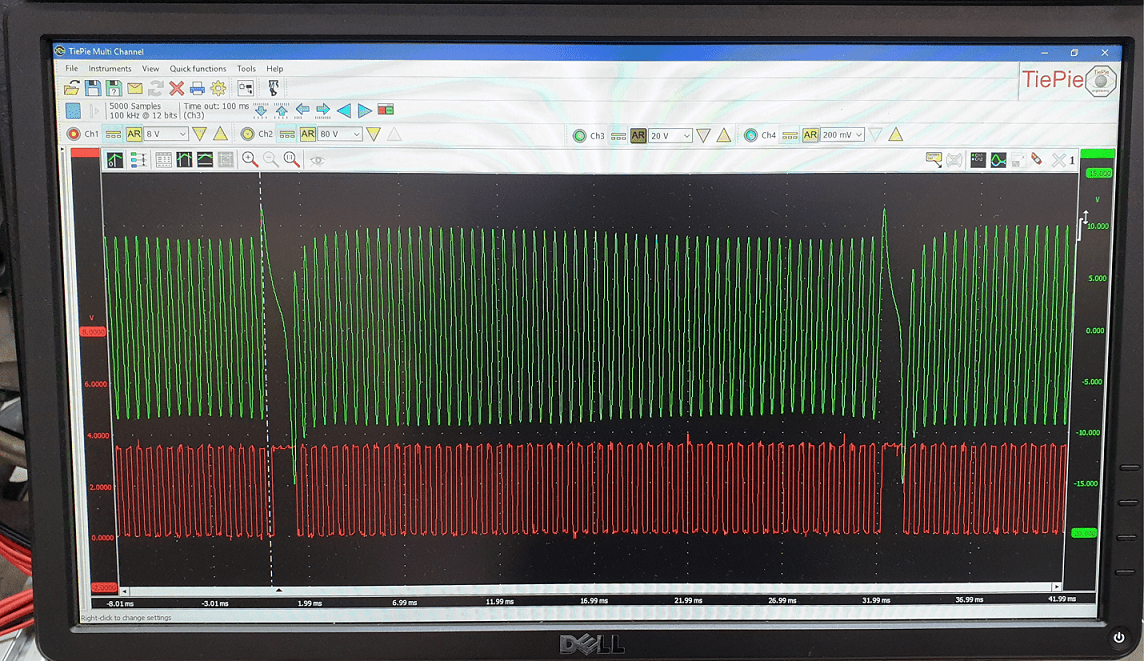
Наведене нижче зображення прицілу було знято під час його запуску Проект BMW Megasquirt. На зображенні прицілу показано оцифровування (жовтий) індуктивного сигналу колінчастого вала (червоний). На зображенні чітко видно, що в сигналі жовтого блоку відсутні імпульси, а в цей момент у сигналі колінчастого вала відсутній зуб не проходить.
Нечистий цифровий сигнал містить помилки: це відсутня інформація
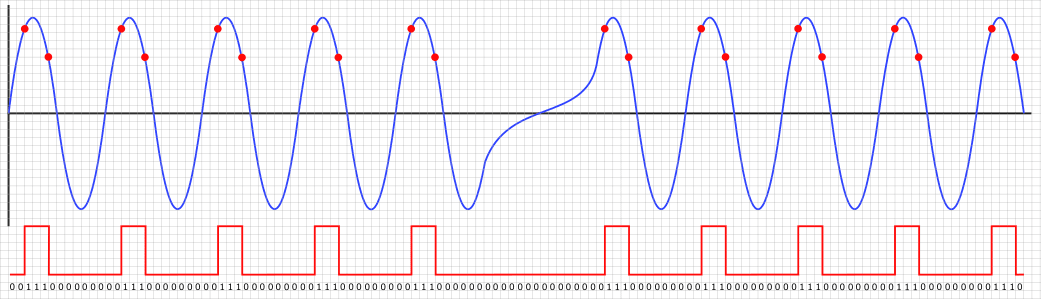
Щоб гарантувати, що невеликі коливання профілю напруги не викликають неправильну інтерпретацію ECU, був вбудований так званий гістерезис. Гістерезис - це різниця між наростаючим і спадаючим фронтами профілю напруги. На зображенні нижче ми бачимо, що червоні точки на наростаючих фронтах мають вищу напругу, ніж червоні точки на спадаючих фронтах. Таким чином ми можемо бути впевнені, що невеликі коливання сигналу не впливають на цифрове перетворення.
У першому абзаці, де ми почали говорити про перетворення імпульсного сигналу в цифровий сигнал, уже згадувалося, що частота сигналу визначається на основі часу між двома наростаючими фронтами прямокутного сигналу. З цих прикладів можна чітко зробити висновок, що гістерезис дійсно впливає на ширину прямокутного сигналу, але не впливає на час між наростаючими фронтами, а тому не впливає на частоту сигналу.
Оцифрований сигнал генератора імпульсів з гістерезисом
При правильно налаштованому гістерезисі синусоїдальний сигнал належним чином перетворюється на придатну для використання прямокутну напругу, лише з кількома логічними в місцях, де проходить відсутній зуб.
Зверніть увагу, що під час налаштування MegaSquirt ECU були змінені налаштування, включаючи спрацьовування на лініях зростання та спаду. Як наслідок, під час проходження відсутнього зуба в першому прикладі напруга становить 0 вольт, а на зображенні нижче напруга становить 5 вольт.
Сигнал генератора імпульсів з чистою та правильною прямокутною напругою
Вихідні сигнали: Вихідні сигнали складаються з цифрових імпульсів увімкнення/вимкнення з діапазоном напруги від 0 до 5 вольт (рівень TTL) з дуже низьким струмом. Однак приводи вимагають керування за допомогою вищих рівнів напруги та струму. Сигнали ввімкнення/вимкнення можна модулювати за шириною імпульсу (ШІМ), де ширина імпульсу може змінюватися з постійною частотою.
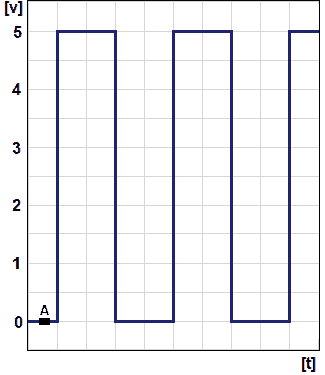
На наступному малюнку показано прямокутну напругу на рівні TTL як функцію часу. The робочий цикл цього сигналу ШІМ становить 50%.
Для керування виконавчими механізмами потрібні драйвери. За допомогою цифрового вихідного сигналу необхідного струму можна досягти за допомогою драйвера. У наступному розділі ми обговоримо драйвери.
Приклад: сигнал ШІМ
Ми знаходимо драйвери в кожному ECU та в деяких приводах, таких як котушки запалювання DIS. Драйвер також називають вихідним каскадом або силовим транзистором. Драйвер дозволяє перетворювати вихідні сигнали на рівні TTL: від 0 до 5 вольт, з низьким струмом 1 мА від ECU до напруги до 14 вольт і струму приблизно до 10 А.
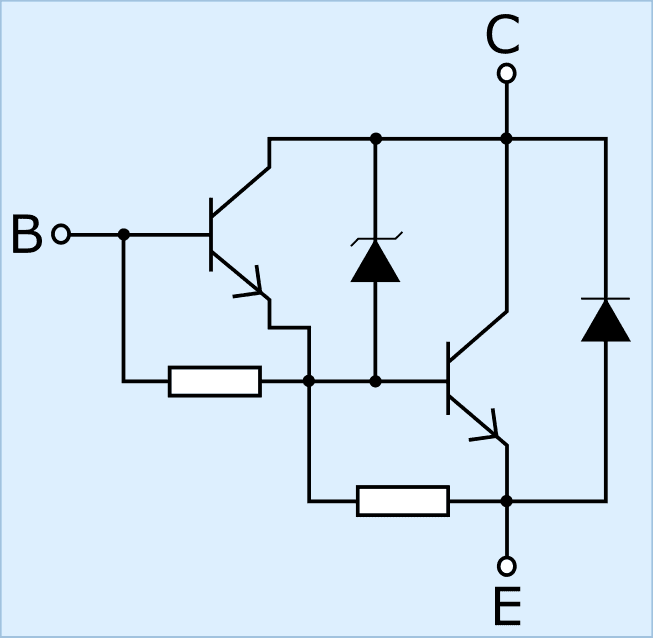
Драйвер може підключити декілька транзистори містять. Ми називаємо такий транзистор "Транзистор Дарлінгтона“. На наступних зображеннях показано такі схеми:
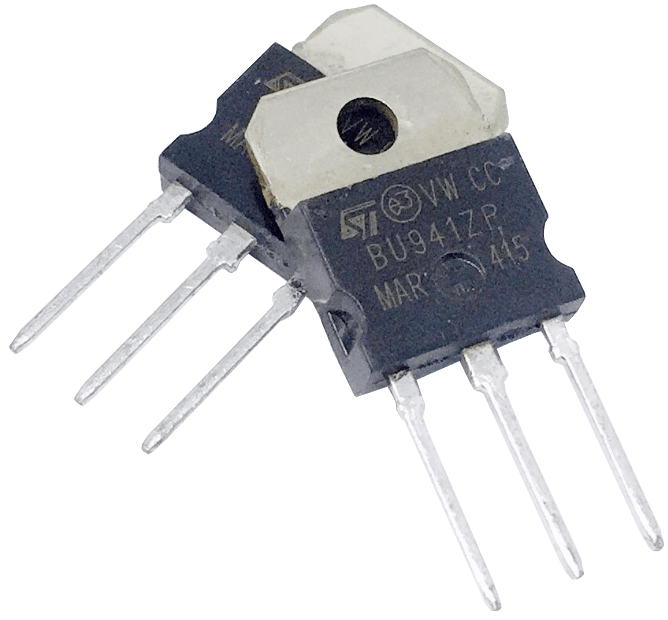
Схема схеми Дарлінгтона з двома транзисторами для керування котушкою запалювання (джерело: специфікація BU941ZR).
Два транзистора, кожен зі схемою Дарлінгтона (BU941ZR)
Інтегральні схеми драйверів зі схемами Дарлінгтона та додатковою електронікою, серед іншого, для захисту від температури та зворотного зв’язку з мікропроцесором.
1. Автодром Дарлінгтона
2. Транзистори Дарлінгтона (2x)
3. Драйверні мікросхеми з кількома схемами Дарлінгтона
На сторінці: способи керування приводами управління пасивними, активними та інтелектуальними приводами за допомогою (силового) транзистора або польового транзистора обговорюється більш детально.