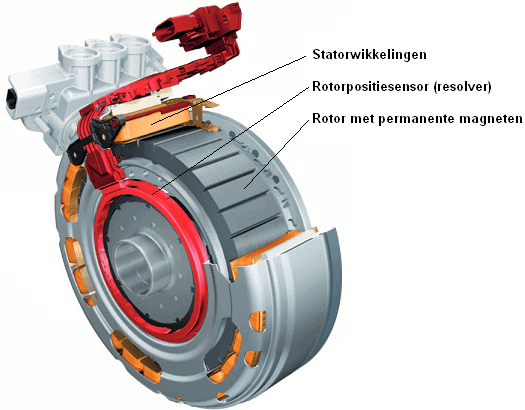
Giriiş: Operasyonu için senkron elektrik motoru doğru yıkamanın yapılması önemlidir. çevirici kontrol edilir. Hangi bobine (U, V veya W) enerji verilmesi gerektiğini belirlemek için invertör ECU, "çözümleyici" olarak da adlandırılan rotor konum sensörü tarafından ölçülen rotorun konumunu okur.
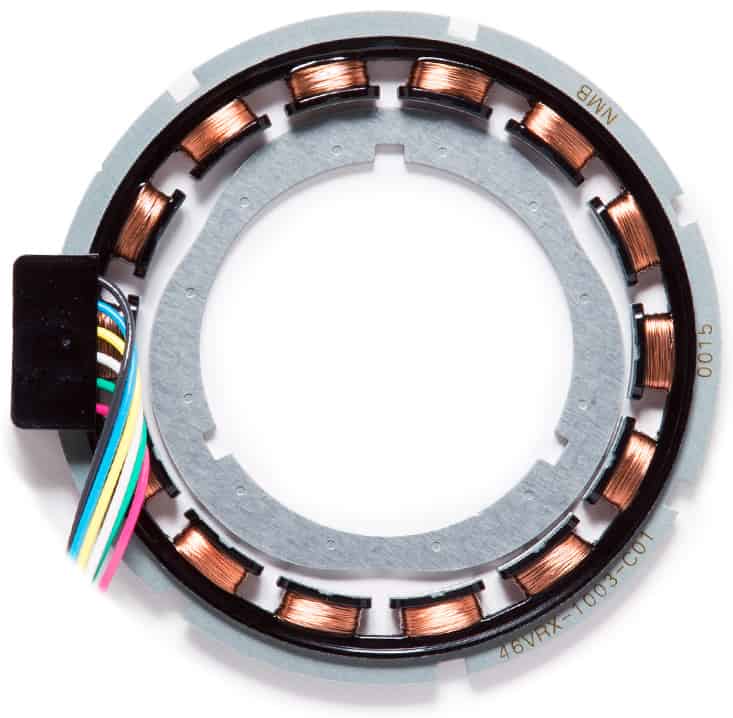
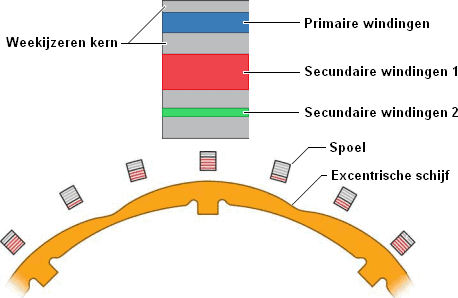
Çözücü, dönen bir eksantrik plakanın iç tarafında çok sayıda bobin bulunan bir dış halkadan oluşur. Eksantrik plaka ile bobinler arasındaki mesafe, döndükçe sürekli olarak değişir.
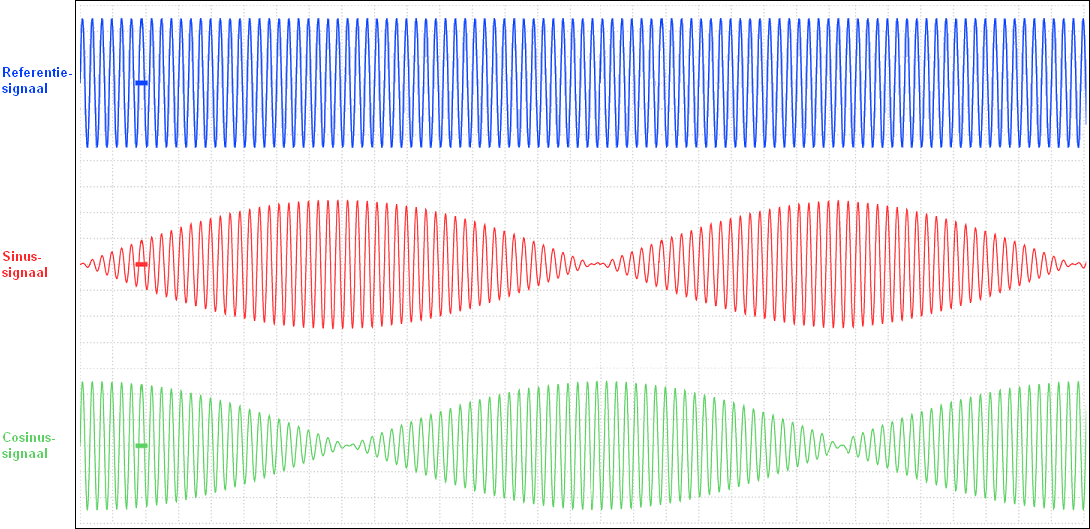
Çözümleyiciden gelen sinyaller: ECU çözümleyiciye bir referans sinyali sağlar. Bobin ile eksantrik arasındaki hava boşluğu, yüksek veya düşük sinüzoidal alternatif voltaj oluşturur. Kırmızı veya yeşil sinüzoidal sinyalin genliği yüksek olduğunda (aşağıdaki şekle bakın), eksantrik ile bobin arasındaki hava boşluğu küçüktür.
Çözücü hem dururken hem de elektrik motoru çalışırken çalışır: her iki durumda da ECU'nun rotorun hangi konumda olduğunu bilmesi gerekir. Aşağıdaki resim teorik sinyalleri göstermektedir. Gerçekte frekans çok daha yüksektir, dolayısıyla sinüs ve kosinüs sinyallerinin genliğindeki değişim açıkça görülebilir.
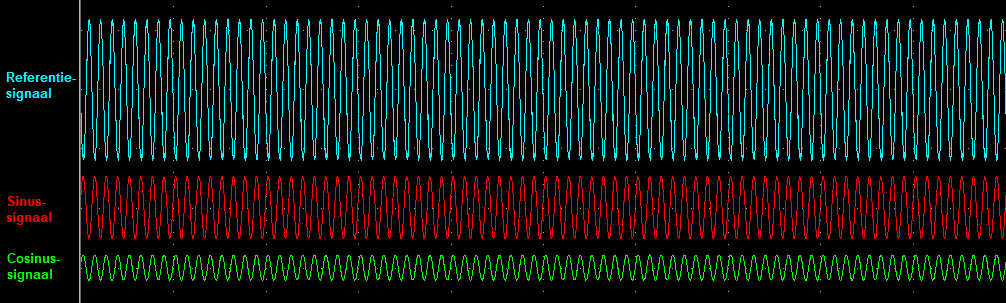
Aşağıdaki iki resim bir çözümleyicideki gerçek ölçümü göstermektedir. Burada da üstte referans sinyalini, altta sinüs ve kosinüs sinyallerini görüyoruz. İlk görüntü duruyor: elektrik motoru çalışmıyor. Sinüs sinyalinin ve kosinüs sinyalinin yüksekliği sabit kalır. Bu alternatif voltajın seviyesine bağlı olarak ECU, sabit durumdayken rotorun nerede olduğunu bilir.
Durma halindeki çözümleyici sinyalleri
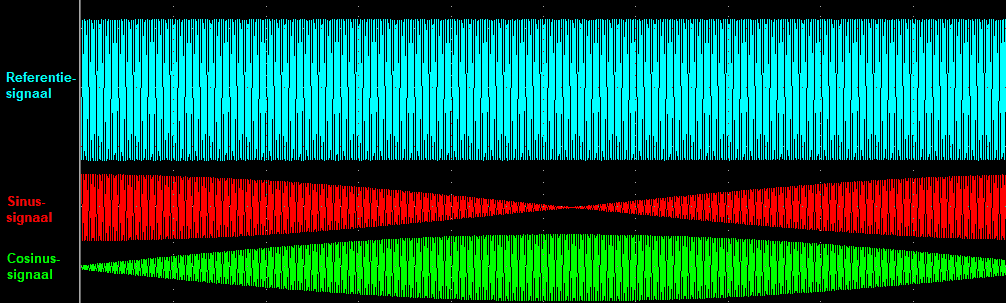
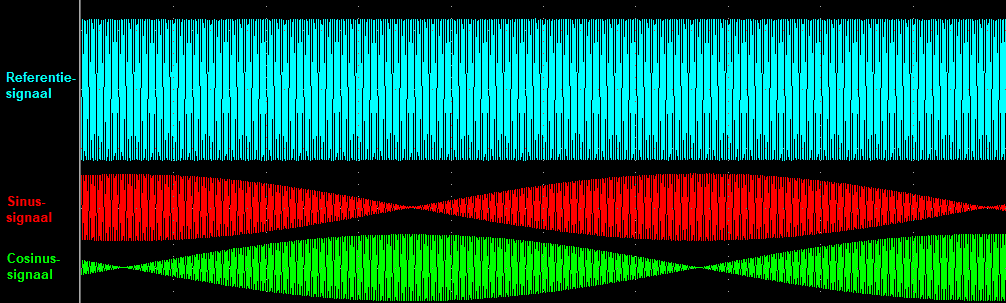
Sonraki iki görüntüde bölüm başına süre kısaltılmıştır. Çözümleyicideki referans sinyalinin frekansı değişmez ancak ölçümde daha uzun bir zaman periyodunda ölçülür. Sonuç olarak sinüs ve kosinüs sinyallerinin genliklerinin net bir şekilde değiştiğini görüyoruz. İlk görüntü düşük rotor hızında, ikincisi ise artırılmış hızda ölçüldü. Hız arttıkça sinüs ve kosinüs sinyallerinin frekansı artar (birim zamanda daha fazla sinyal), ancak genlik (alternatif voltajın seviyesi) sabit kalır.
Çözümleyici sinyalleri: hız düşük
Çözümleyici sinyalleri: hız arttı
Çözümleyicinin bileşenleri: VW E-Golf'ün çözümleyicisi seri bağlı 30 bobin içerir. Çözümleyicideki her bobin, üç farklı sargıya sahip yumuşak demir bir çekirdekten oluşur: birincil, ikincil 1 ve ikincil 2.
Birincil bobin (mavi) yüksek frekanslı bir alternatif voltajla beslenir.
İkincil dönüşlerin sayısı (1 kırmızı, 2 yeşil) her bobinde farklıdır.
Eksantrik plakanın kamı bobin boyunca hareket ettiğinde ikincil sargılardaki endüktans yükseltilir. Her bobindeki 1 ve 2 numaralı sekonder sargıların sarım sayısından dolayı bu durum sekonder sargılarda da farklı gerilimlerin oluşmasına neden olur. İnverterdeki ECU, sekonder sargı 1 ve 2'nin gerilimlerine bağlı olarak rotorun konumunu hesaplayabilir.
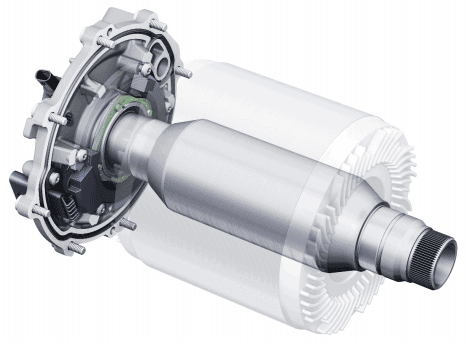
Çözücünün rotor üzerindeki ayarı çok hassastır: birçok üretici, çözümleyicide sorun olması durumunda elektrik motorunun tamamının değiştirilmesi gerektiğini belirtir. Çözümleyicinin (yanlışlıkla) sökülmesinden veya elektrik motoru muhafazasının dış tarafındaki cıvataların gevşetilmesinden sonra çözümleyici artık doğru şekilde yeniden birleştirilemez. Bu durumda da birçok üretici elektrik motorunun değiştirilmesini önermektedir.
Bir rotorun tam rotor konumu senkronize motor Duruş halindeyken ve sürüş sırasında bilinmelidir. Sensör arızalıysa araç artık hareket edemez.
İtibaren asenkron motor diğer yandan rotor konumunun izlenmesine gerek yoktur. Rotor konum sensörü, rotor devri başına dört darbe yayar. Bu ölçüm, stator ile rotor arasındaki dönen manyetik alan arasındaki maksimum kayma miktarını izler. Hall sensörü genellikle sensör olarak kullanılır. Hall sensörü, rotor döndüğünde ECU'ya darbeler iletir ancak senkron motorun çözücüsünün aksine, durma halinde ölçüm gerçekleştiremez. Üreticiler bazen senkron motorun çözümleyicisini rotor konum sensörü olarak kullanmayı da tercih ederler.