denekler:
- Genel park yardımı
- Park mesafe Kontrolü
- Geri görüş kamerası
- Yan görünüm
- çevre görünümü
- Park yardımı
Genel park yardımı:
Park yardımı, sürücünün park etme ve park etme sırasında yardımcı olan sistemleri içerir. En bilinen park yardım sistemi, PDC olarak kısaltılan “park mesafe kontrolü”dür. Bu sistem, araç sürücüsünü arka tarafta araca olan mesafe konusunda bilgilendirirken, kapsamlı sistemlerde ön tarafa da bilgi verir. Bu sayfada park mesafesi kontrolünün bir uzantısı veya tamamen bağımsız bir yardım sistemi olan modern teknolojiler açıklanmaktadır.
Park mesafe Kontrolü:
Park Mesafe Kontrolü (PDC), park yerlerine girerken ve çıkarken sinyalleri ölçen ve engele olan mesafe hakkında bilgi veren bir mesafe uyarı sistemidir. Arka tamponda ve sıklıkla ön tamponda da ultrasonik sensörler bulunur (resme bakın). Bunlar insan kulağının algılayamayacağı kadar yüksek frekansta ses dalgaları yayarlar. Bu ultrasonik frekanslar yakındaki nesnelerden yansır ve sensör tarafından alınır. Sensör bu sinyallerin gönderilmesi ve alınması arasındaki süreyi ölçer. Nesne ne kadar yakınsa sinyal o kadar hızlı geri döner. Sensör bunu yakalar ve PDC kontrol ünitesine (bilgisayar) iletir.
Bu bilgisayar bunu sürücüye ses sinyalleriyle ve hem görüntü hem de ses sinyalleriyle aktarabiliyor. Daha sonra nesne yaklaştıkça giderek daha hızlı hale gelen bir bip sesi duyulur. Yaklaşık 30 cm mesafeden sürekli bir bip sesi çıkararak sürücü olarak size durmanız gerektiğini bildirir.

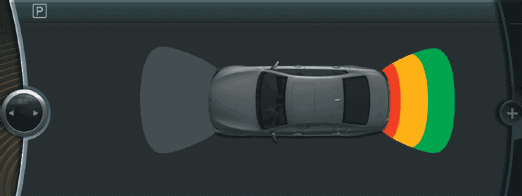
Modern yerleşik bilgisayarlar genellikle nesneye olan mesafenin ekranda gösterildiği bir seçenekle donatılmıştır. PDC sensörleri aynıdır; kontrol ünitesi sensörlerden gelen verileri hesaplar ve bunları ekranın görüntüleyebileceği bilgilere dönüştürür.
Aşağıdaki resimde PDC kontrol ünitesi (ECU) gösterilmektedir. Bu gri kare mikro denetleyiciyi, amplifikatörü ve bir AND geçidini içerir. Mikrodenetleyici yaklaşık 40 kHz (siyah) frekansta kare dalga voltajı iletir. Ayrıca periyodik olarak düşük frekanslı bir blok voltajı da verilir (kırmızı/mavi). AND kapısı iki blok voltajını alır. Her iki voltaj da yüksek olduğunda, çıkış voltajı (AND kapısının sağında) yüksektir. İki voltajdan biri düşük olduğunda çıkış da düşük olur. Çıkış voltajı mikro denetleyiciye ve PDC sensöründeki vericiye geri gönderilir. Verici ultrasonik sinyali yaklaşık 300 m/s hızında yayar. Yakında bir nesne olduğunda ultrasonik ses yansıtılır ve alıcı tarafından kaydedilir. Biz buna “üçgenleme” diyoruz. Alıcı, oluşturulan blok sinyalini ECU'ya gönderir. Blok sinyali bir amplifikatör kullanılarak güçlendirilir ve ardından mikro denetleyici tarafından işlenir.
AND geçidinden çıkış sinyalinin alınması ile yükseltici arasında geçen süre, nesneye olan mesafenin bir ölçüsüdür. PDC sensörü ile nesne arasındaki mesafe ne kadar küçük olursa, süre de o kadar kısa olur. Mikrodenetleyici, zili kontrol eder veya CAN veriyolu aracılığıyla diğer kontrol üniteleriyle iletişim kurar.
Aşağıdaki devre şeması (VAG), kontrol üniteleri arasındaki iletişimi, anahtarlara giden girişleri ve diğer şeylerin yanı sıra zile giden çıkışları gösterir.
PDC kontrol ünitesi (J446), sürüş hızını ve geri vites sinyalini CAN veri yolu üzerinden alır. PDC kontrol ünitesi, T12/11 bağlantısı yoluyla tüm PDC sensörlerine (G86, G203, G334 ve G335) bağlı olan kablo ekine (arka tampondaki X206) modüle edilmiş bir blok voltajı gönderir. Her PDC sensörünün ECU'ya giden kendi sinyal kablosu (pim 2 aracılığıyla) vardır. Ayrıca her sensörün toprağı bir toprak kaynağına (352) bağlanır.
Bir veya daha fazla sensör bir nesne algıladığında kontrol ünitesi sesli uyarıyı (H15) etkinleştirir. Nesneye olan mesafeye bağlı olarak sesli uyarı daha hızlı veya daha yavaş aralıklı bir ses sinyali yayar.

Diyagnoz arayüzü (J533) ile iletişim sayesinde aşağıdaki diyagnostik fonksiyonların gerçekleştirilmesi mümkündür:
- arıza hafızasını sorgula
- Kontrol ünitesinin kodlamasını ayarlayın (örneğin sistemi ön taraftaki PDC sensörleriyle genişlettikten sonra veya bir çekme çubuğu taktıktan sonra)
- zil sesini ayarlayın
- Diğer şeylerin yanı sıra, tüm sensörlerden nesneye olan mesafeye, hesaplanan mesafeye ve verici ile alıcının stabilizasyon süresine ilişkin ölçülen değer bloklarını sorgulayın.
Geri görüş kamerası:
Park yardımı, park mesafesi kontrolüne ek olarak bir geri görüş kamerasıyla da donatılabiliyor. Sürücü aracı geri vitese taktığı anda ya da iç mekandaki bir düğmeye bastığı anda aracın arka tarafındaki kamera devreye giriyor. Genellikle radyonun veya araç bilgisayarının ekranı görüntüyü gösterir.
Aşağıdaki resimde aracın arkasındaki resimle birlikte bir BMW ekranı gösterilmektedir. Kamera görüntüsünün sağında, önde ve arkada üç parçalı ızgaraya sahip bir araç görülüyor; Bu, PDC sensörlerinin kaydettiği bir nesneye olan mesafeyi gösterir.
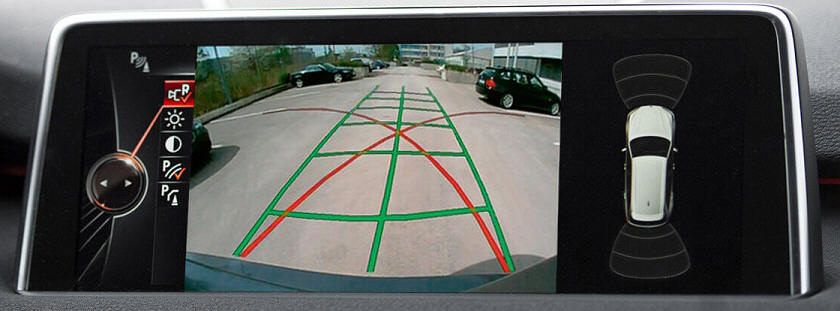
Geri görüş kamerası görüntüsünde kırmızı ve yeşil çizgiler görülebiliyor. Kırmızı çizgiler aracın yönlendirilebileceği olası yönü gösterir; Maksimum yönlendirmede tekerlekler virajın dışındaki kırmızı çizgiyi takip edecektir. Yeşil ızgara gidonun döndürüldüğü yönü takip eder; şu anda ön tekerlekler dümdüz önde. Sürücü direksiyonu çevirdiğinde yeşil çizgiler gerçek sürüş çizgilerini gösterir. Direksiyon açısı sensörü direksiyon simidinin konumunu kaydeder.
Geri görüş kamerası bazen düz görünümdedir ve genellikle plakanın ve/veya bagaj kapısını açma kolunun yakınında bulunur. Bazen üreticiler kamerayı görüş alanı dışına monte etmeyi tercih ederler. Aşağıdaki resimde, bir elektrik motorunun kamerayı dışarı doğru hareket ettirmek için VW amblemini eğdiği bir VW Golf'ün geri görüş kamerası gösterilmektedir. Tekrar ileriye doğru hareket ettiğinizde amblem otomatik olarak geriye doğru katlanır. Kamera görüş alanının dışına yerleştirildiği gibi lens de daha az çabuk kirlenir.

Yandan görünüm:
İki araç veya büyük nesneler arasında geri geri gittiğinizde sağa sola bakmak için biraz ileri gitmeniz gerekiyor. Yan görüş kamerasıyla (köşe görünümü de denir) bu çok daha kolaydır; Ön tamponun solunda ve sağında bulunan kameralar, görüntüyü ön paneldeki ekrana gönderiyor. Resim köşe kameralarından alınan görüntüyü göstermektedir. Maalesef kameralar görünmez bir şekilde monte edilemez. Yan görüş kamerasıyla donatılmış araçların tamponunda (genellikle) siyah bir mercek bulunur. Aşağıdaki resimde sol kameralı bir BMW'nin ön tamponu gösterilmektedir.


Çevresel görünüm:
En lüks park yardım sistemleri arasında hiç şüphesiz üstten görünüm, 3D veya kuş görünümü olarak da bilinen “çevresel görünüm” bulunur. Her marka sisteme kendi adını ve özelliğini verir. Artık surround görünüm adını kullanıyoruz.
Çevresel görünümde aracın üst kısmı ekranda gösterilir. Arabanın tavanına ve çevresine bakan bir kamera varmış gibi görünüyor. Araba bir simülasyondur ve ortam birden fazla (genellikle dört) kamera tarafından kaydedilir.
Aşağıdaki üç resim (BMW'den) sürücünün gördüğü resmi göstermektedir. Park ederken, park alanı ile direk vb. nesnelerin ayrımı net bir şekilde görülebilir. Geriye doğru giderken arka tarafı yakınlaştırabilirsiniz; Burada esas olarak bitkileri görebilirsiniz. Geleneksel PDC sensörleri bitkilere olan mesafeyi kaydeder. Bilgisayar bu mesafeyi kırmızı renkle işaretler.

İleriye park etme sırasında sistem çevreyi ve ön tarafı da gösterebiliyor. PDC sensörleri artık çite olan mesafenin belirlenmesine de yardımcı oluyor.

Kaldırım kenarına paralel park etmek, sürücünün dikkatli olmaması durumunda lastiklere ve jantlara zarar verebilir. Çevresel görünüm de artık bir çözüm sunuyor; Sokak manzarasının iyi bir şekilde görülebilmesi sayesinde kaldırıma yakın ve düz bir şekilde park edebilirsiniz. BMW'nin en son gelişmeleri kamera görüntüsünü ters çevirmeyi ve aracı simüle etmeyi mümkün kılıyor.

Sonraki üç resimde kameraların sıklıkla bulunduğu yerler gösterilmektedir.



Park yardımı:
Park yardımının bir uzantısı olarak, "parktan çıkma yardımı" olarak adlandırılan sistem, görüş mesafesinin kısıtlı olduğu bir park yerinden geriye doğru çıkarken sürücüye yardımcı olabilir. Bu, aracın bir duvar yanına veya araçların arasına park edildiği durumlarda olabilir.
Aracın arkasındaki sensörler, aracın arkasından geçen ve muhtemelen çarpışma riski oluşturan trafiği tespit ediyor. Bu, araca belirli bir hızla yaklaşan tüm hareketli nesneleri içerir. Park destek sistemi yaklaşan bir aracı algıladığında bilgi-eğlence sistemi ekranında bir mesaj belirir. Buna genellikle akustik bir ses sinyali eklenir. Sürücünün bu sinyalleri dikkate almaması ve geri gitmesi durumunda sistem, frenleri çalıştırarak fiziksel olarak müdahale ederek aracı yavaşlatıyor.
