denekler:
- tanıtım
- AC elektrik motoru (senkron, kalıcı mıknatıslı)
- Senkron motorun AC kontrolü
- AC elektrik motoru (asenkron, sincap kafesli motor)
- Senkron ve asenkron elektrik motorunun verimlilik haritası
Giriiş:
Hibrit veya tamamen elektrikli bir aracı sürmek için bir elektrik motoru kullanılır. Elektrik motoru, tekerlekleri tahrik etmek için elektrik enerjisini (aküden veya menzil artırıcıdan) harekete dönüştürür. Ayrıca elektrik motoru, motoru frenlerken kinetik enerjiyi elektrik enerjisine dönüştürebilir: rejeneratif frenleme. Bu durumda elektrik motoru bir dinamo görevi görmektedir. Bu iki işlevi nedeniyle elektrik motoruna da “elektrik makinesi” diyoruz.
Elektrik motorunu hibrit bir araca yerleştirme seçenekleri şunlardır:
- Aktarımın çoklu kayışla veya doğrudan krank mili aracılığıyla sağlandığı yanmalı motorda;
- Motor ve vites kutusu arasında: vites kutusunun giriş mili elektrik motoru tarafından tahrik edilir;
- Şanzımana entegre edilmiştir;
- Diferansiyelde;
- Tekerlek göbeklerinde (göbek motoru).
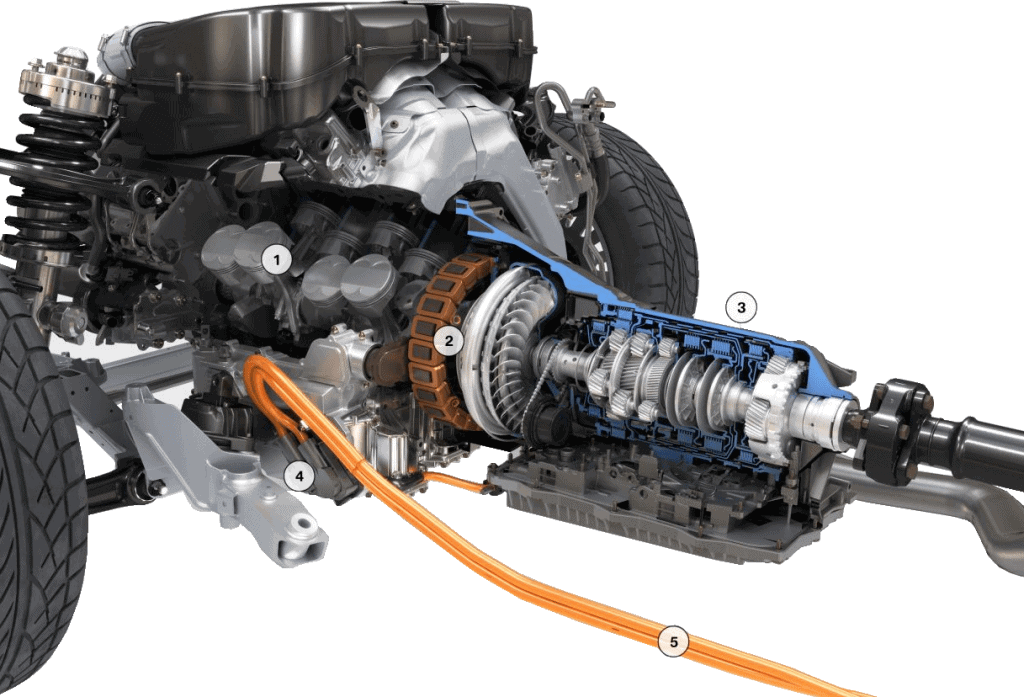
Tamamen elektrikli bir otomobilin elektrik motoru genellikle arka aksa monte edilir. Aşağıdaki resimde, Tesla'nın silindirik mahfazasındaki ve son tahrikindeki invertörlü elektrik motoru gösterilmektedir.

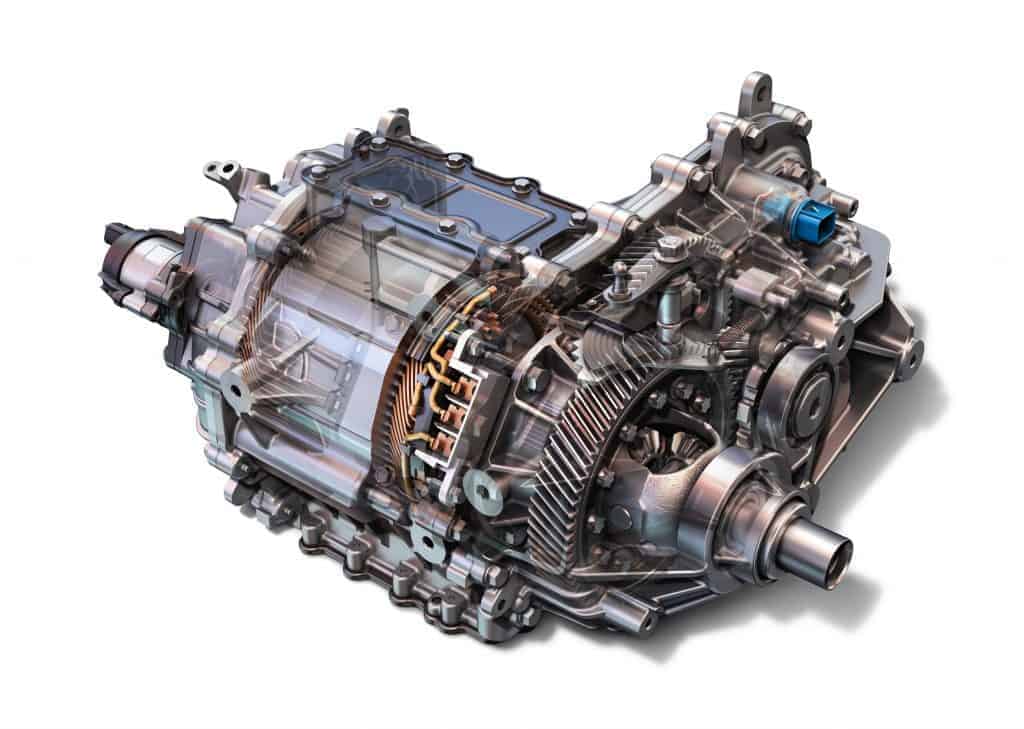
AC elektrik motoru (senkron, kalıcı mıknatıslı):
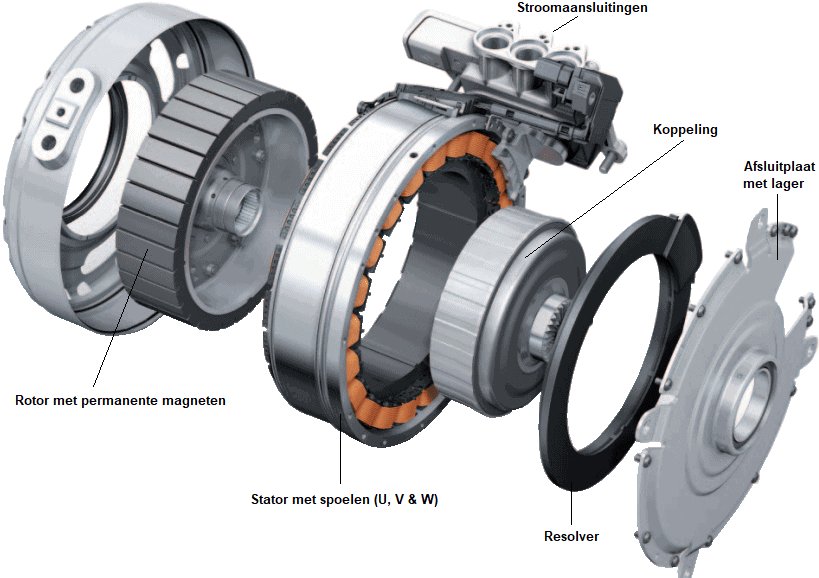
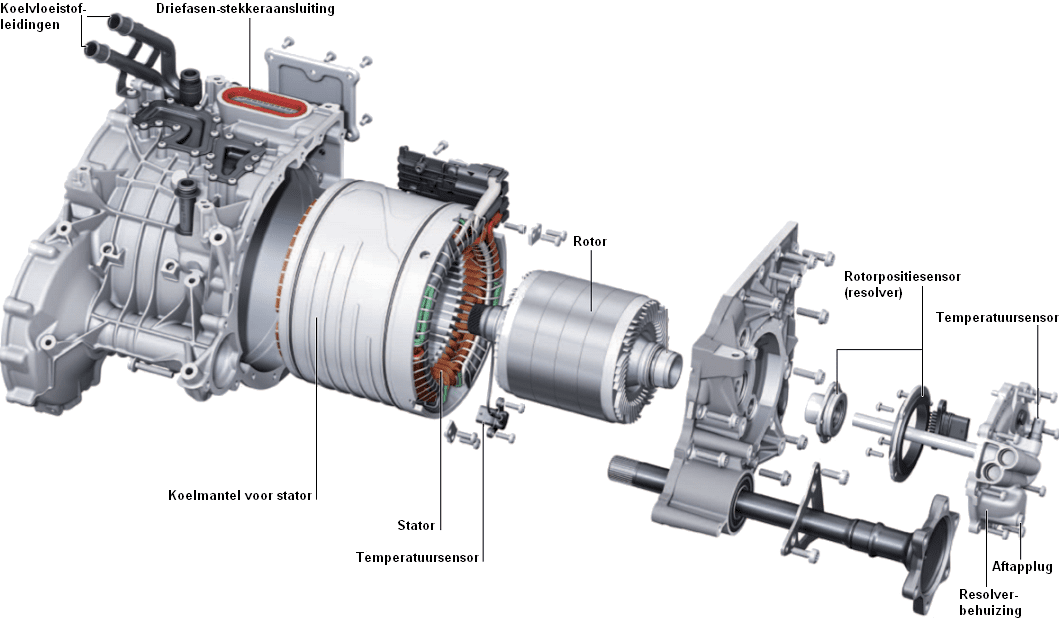
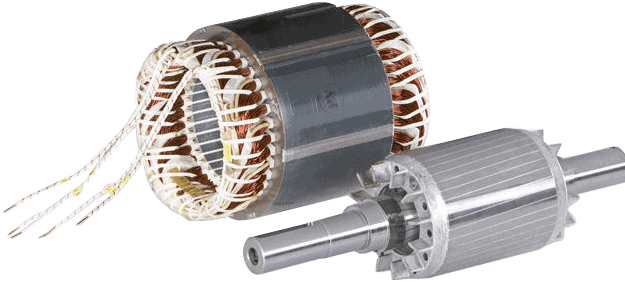
Aşağıdaki resimde bir Audi (senkron) elektrik motorunun parçaları gösterilmektedir. Bu tip, A6 ve A8'in hibrit varyantlarında kullanılır. Bileşenleri kısaca listeleyeceğiz. Bu bileşenler aşağıdaki paragraflarda ayrıntılı olarak açıklanmaktadır.
Kalıcı mıknatıslı rotor, statordaki manyetik alanın değişmesi sonucu dönmeye başlayacaktır. Rotor, farklı çalışma koşullarında yanmalı motoru ve elektrik motorunu (bir kavramayla (gösterilmemiştir) birlikte) bağlayabilen veya bağlantısını kesebilen kavramaya bağlıdır. Rotorun konumu şu şekilde belirlenir: çözümleyici ölçülen: bu veriler IGBT sürücülerinin stator bobinlerini doğru zamanda kontrol edebilmesi için önemlidir.
Kalıcı mıknatıslı elektrik motoru hem DC (doğru voltaj) hem de AC (alternatif voltaj) ile kontrol edilebilir.
Senkron motor, hibrit veya tam elektrikli araçlarda en yaygın kullanılan elektrik motorlarından biridir. Bu tip elektrik motoru, sargılı bir stator ve birkaç sabit mıknatıslı bir rotordan oluşur. Rotor, statorun manyetik alanıyla aynı hızda döner. Senkron motor aşağıdaki şekilde kontrol edilebilir:
- AC: sinüzoidal bir sinyal (alternatif akım) tarafından kontrol edilir.
- DC: kare veya trapez sinyalle kontrol edilir (doğru akım)
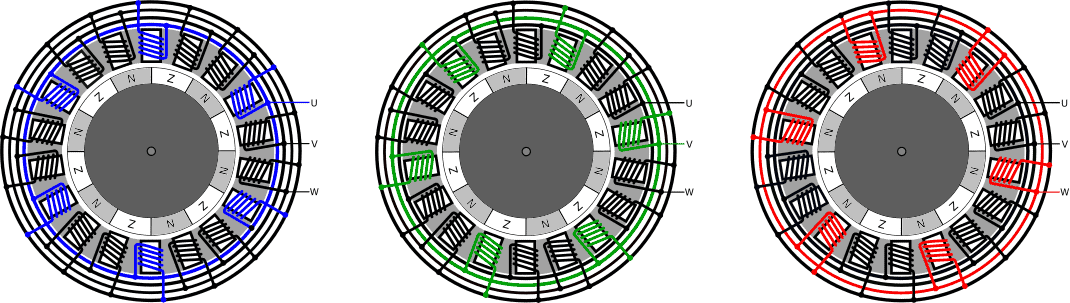
Senkron motorun statoru üç stator bobin grubundan oluşur: U, V ve W. Her grup, statorun tüm çevresi boyunca dağıtılmış, paralel bağlanmış altı bobinden oluşan üç set içerir. Her üç bobin de aynı seriye aittir.
- U bobinleri: mavi
- V bobinleri: yeşil
- W bobinleri: kırmızı
Rotor birkaç kalıcı mıknatıs içerir. Statordaki bobinlere dönüşümlü olarak enerji verilerek dönen bir manyetik alan oluşturulur. Rotor dönen alanı takip eder ve dolayısıyla döner.
Senkron motorun AC kontrolü:
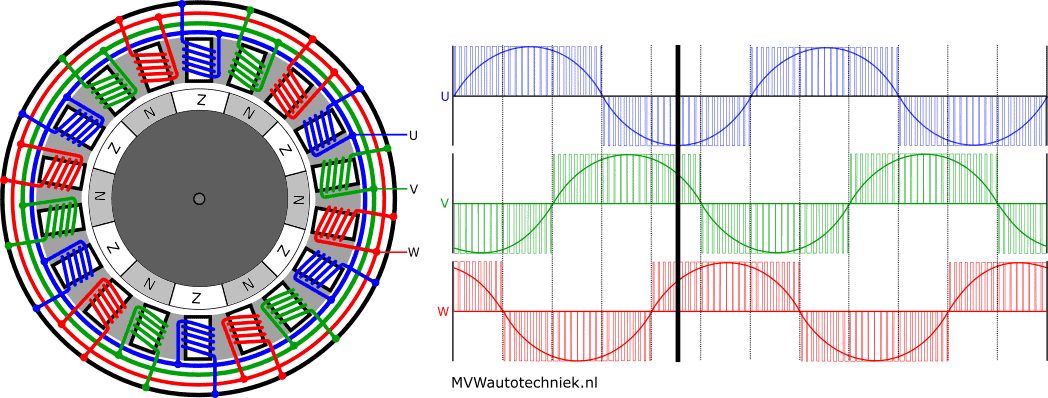
AC kontrolü frekans kontrollü kontrol veya sinüzoidal komütasyon kullanır. Stator bobinleri, rotoru döndürmek için alternatif üç fazlı sinüs dalgası voltajıyla beslenir.
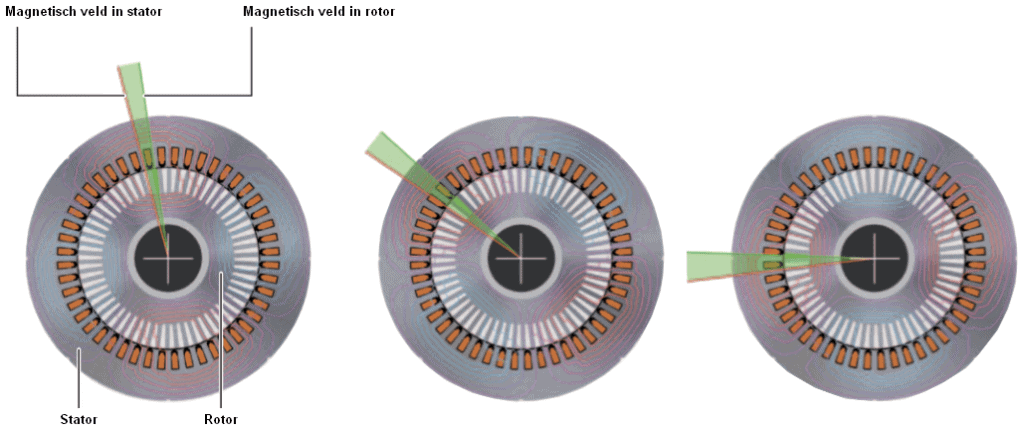
Aşağıdaki resim maksimum uyarılmış U-bobin ile rotor konumunu göstermektedir. Manyetik alanın bir sonucu olarak kuzey kutupları, enerjilendirilmiş U bobinlerinin tam karşısında konumlanmıştır. Grafikte elektrik motorunun yanındaki imleç bobinlerin o andaki kontrolünü gösterir.
Bilginize: stator bobinlerini kontrol ederken açıklamadaki rotor döner saat yönünde.
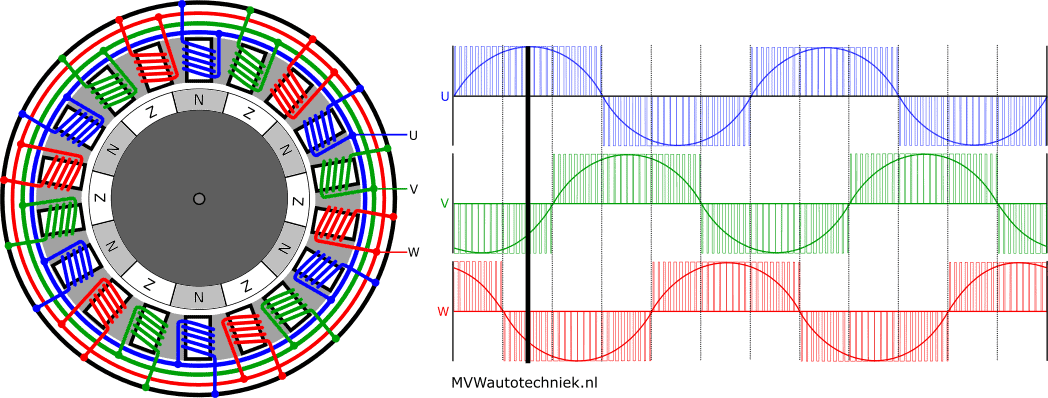
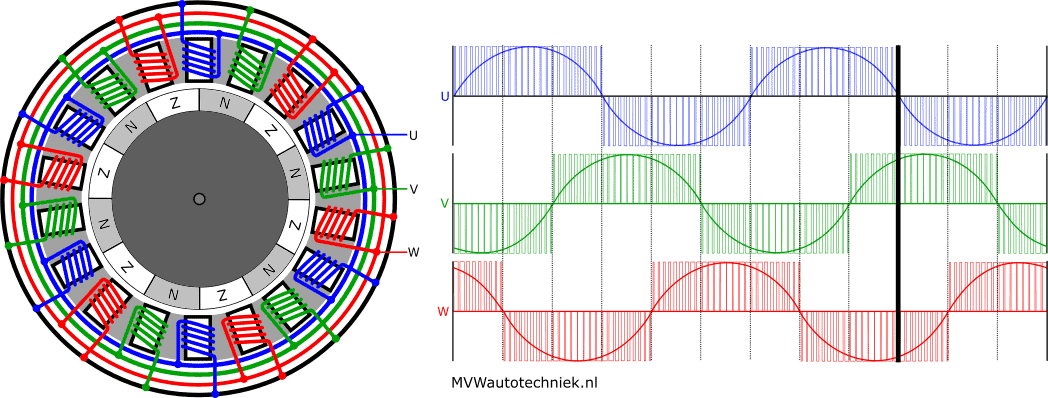
Aşağıdaki görüntüde sinüs dalgası, yani U-bobinden geçen alternatif akım maksimum düzeyde negatiftir. Bu kontrol sırasında rotorun güney kutupları enerji verilen (U) stator bobinlerinin tam karşısındadır.
Aslında rotorun kuzey ve güney kutupları arasında küçük bir hava boşluğu vardır. Güney kutbundan kuzey kutbuna geçiş sırasında U-bobinindeki akımın yönü değişir. Daha öte:
- V bobininden (yeşil) geçen akım neredeyse maksimum düzeyde pozitiftir; kuzey kutbu da bobinin hemen hemen karşısındadır.
- W bobininden geçen akım maksimum negatiftir ve artmaktadır. Güney kutbu bobini geçerek döndü.
Akımın nasıl aktığı hakkında bir fikir vermek için aşağıdaki animasyon, alternatif akım nedeniyle rotorun dönüşünü göstermektedir.
AC elektrik motoru (asenkron, sincap kafesli motor):
Sincap kafesli veya kısa devre armatürlü elektrik motoru asenkron bir motordur. Kalıcı mıknatıslı senkron motor ile asenkron motor arasındaki fark rotordadır: bu, uzunlamasına yönde iletkenlere sahip yumuşak demir bir tamburdur. Rotor, stator ile asenkron olarak çalışır; bu, rotor ile statorun manyetik hızı arasında bir hız farkı olduğu anlamına gelir. Stator tamamen aynı.
Asenkron elektrik motorunun rotoru kısa devre bobinlerinden oluşur; U, V ve W bobinleri bir taraftan birbirine bağlanır. Rotor, statorun dönme alanında olduğunda, rotor bobinlerinde bir endüksiyon voltajı oluşturulur. Rotor bobinleri birbirine kısa devre yaptığı için içlerinden bir akım geçer. Bu akım, rotorun bir manyetik alan oluşturmasına ve bir tork oluşturmasına neden olur. Asenkron elektrik motorunun çalışması endüksiyon kanununa dayandığından ona endüksiyon motoru da diyoruz.
İletilen tork, statordaki dönen manyetik alan ile rotorun hızı arasındaki kaymayı etkiler.
Asenkron motorun senkron motora göre birçok avantajı ve dezavantajı vardır.
Yararları:
- nispeten basit, sağlam ve ucuz rotor;
- düşük hızda yüksek tork.
eksileri:
- daha düşük güç yoğunluğu (kütle başına) ve verimlilik (verimlilik). Kısa devre yapan rotor bobinlerindeki akımlar ilave rotor kayıplarına neden olur;
- hız, yüke bağlı olduğundan doğru bir şekilde kontrol edilemez. Bu başlı başına bir dezavantaj olmak zorunda değildir: iyi bir kontrol sistemi ile asenkron motorun hızı da ayarlanabilir;
- yüksek başlangıç akımı.
Asenkron motorun rotor konumu ve hızı bir ölçüm cihazı ile ölçülür. rotor konum sensörü. Hall sensörleri genellikle rotor konumunu ve hızını iletmek için rotorun devri başına en az dört darbe sağlar. Bu tip rotor konum sensörüne senkron motorlarda olduğu gibi çözücü adını vermiyoruz.
Senkron motordan farklı olarak rotor konum sensörünün, durma halindeki rotor konumunu bilmesine gerek yoktur. Dönme sırasında rotorun konumu önemlidir: manyetik dönme alanı ile rotor arasındaki kaymanın çok fazla olmamasına dikkat edilmelidir. Dönen alan çok hızlı hareket ettiğinde rotorun aniden diğer yöne dönmek istediği bir durum ortaya çıkabilir. Ortaya çıkan kuvvetler mekanik ve elektrikli bileşenler için yıkıcı olabilir.
Bazı üreticiler ayrıca asenkron motor kullanmayı tercih ediyor çözümleyici başvuruyor. Nedeni benim için bilinmiyor. Her durumda çözümleyici hem hareketsiz dururken hem de koşarken son derece hassastır ve bu da hassas kontrole fayda sağlayabilir.
Senkron ve asenkron elektrik motorunun verim haritası:
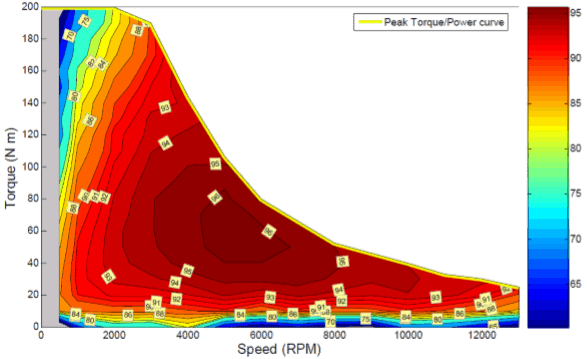
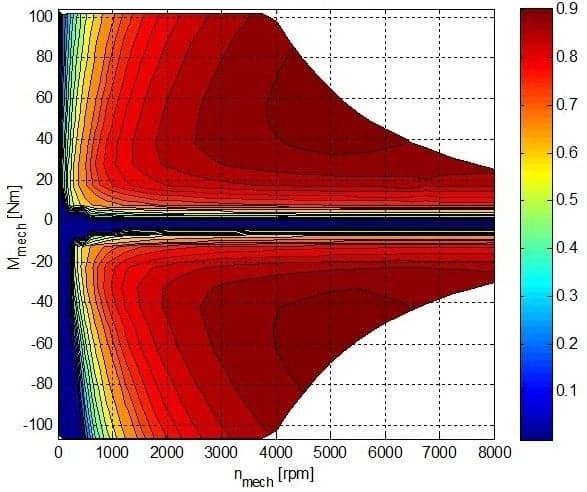
Aşağıdaki resimler senkron elektrik motorunun (solda) ve asenkron elektrik motorunun (sağda) verimliliğini göstermektedir.
- Senkron elektrik motoru çok verimlidir. Verimlilik geniş bir alanda %90'ın üzerinde olup tepe değerleri %96'ya kadar çıkmaktadır. 2000 rpm'den itibaren alan zayıflaması meydana gelir ve bu da maksimum torkun azalmasına neden olur.
- Asenkron motor, düşük hızlarda senkron motora göre önemli ölçüde daha düşük verime sahiptir.
İlgili sayfalar: