denekler:
- tanıtım
- Denge milinin çalışması
Giriiş:
Motordaki kütle kuvvetleri titreşimlere neden olur. Bir motorda ne kadar çok silindir varsa, o kadar az titreşim üretir. Bunun nedeni, 3 silindirli motorda her 240 derecede bir, 4 silindirli motorda her 180 krank mili derecesinde, 6 silindirli motorda her 120 derecede, 8 silindirli motorda her 90 derecede ve 12 silindirli motorda her 60 derecede bir güç stroku gerçekleşmesidir. -silindir silindiri her 4 derecede Bir motorda daha fazla silindir varsa, kısa sürede daha fazla güç stroku olur ve motor neredeyse titreşimsiz olur. Çoğu binek otomobilde XNUMX silindirli motorlar kullanılır. Bu motor, iç mekana iletilen birçok titreşim üretir. Krank milindeki karşı ağırlıklar esas olarak motor titreşimlerini sınırlar.
Motor titreşimlerini daha da sınırlamak için çeşitli otomobil markalarının üreticileri "denge mili" ilkesini uyguladı. Her markanın kendine has yapısı vardır (tek denge mili, aynı yükseklikte 2 denge mili, blokta 2'i alçak, 1'i yüksek olmak üzere 1 denge mili vb.) Denge mili tahriki dağıtım yoluyla gerçekleşir (dişliler, kayış veya zincir) ve çalışma sırasında da “zamanında” ayarlanmalıdır. Doğru yerleştirilmeyen bir denge mili motor titreşimlerini daha da artıracak ve bu da bileşen arızalarına neden olacaktır.
Denge milinin çalışması:
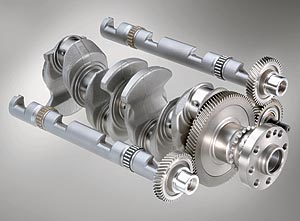
Denge mili, kendisi de dengesiz olan ve dolayısıyla esas olarak dengenin neden olduğu kütle kuvvetlerini telafi eden bir mildir. ikincil piston hareketi ortaya çıkması. Tüm uzunluk boyunca dönerken gerekli dengesizliğe neden olan kalınlaşmalar, kamlar veya deformasyonlar vardır. Hem birincil kuvvetler (yukarı-aşağı piston hareketi) hem de ikincil kuvvetler (bağlantı çubuğunun çapraz olarak aşağıya doğru itilmesinden kaynaklanan yanal kuvvetler) denge milleri tarafından emilir. Bunu başarmak için denge milleri krank milinin iki katı hızda ve ters yönde döner.

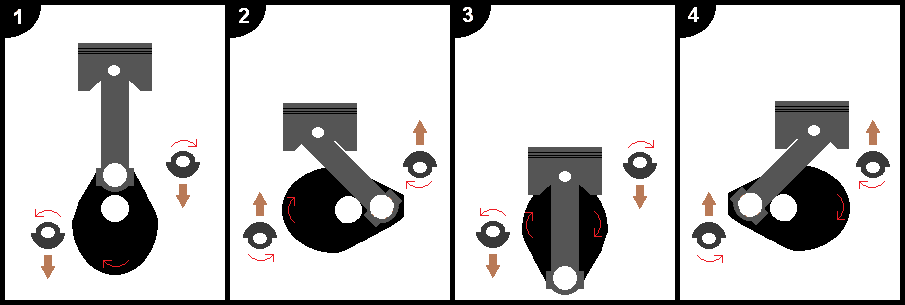
1: Piston TDC'de. Denge milleri aşağıya doğru bakar. Alt denge mili saat yönünün tersine, üst denge mili ise saat yönünde döner. Denge millerinin her ikisi de krank milinden iki kat daha hızlı döner.
2: Krank mili 45 derece döner ve piston ÜÖN'den ÜÖN'e hareket eder. Bu pozisyonda kütle kuvvetleri etki eder. ikincil piston hareketi en büyüğü ortaya çıkar. İkincil piston hareketi aşağıya doğru yönlendirilen kütle kuvvetleri yaratır. Bunu telafi etmek için denge milleri bu konumda yukarıya doğru yönlendirilir.
3: Krank mili 45 derece daha dönüyor ve ODP'de. Denge milleri aşağıya doğru yönlendirilmiştir.
4: Krank mili ODP'den TDC'ye hareket ediyor. Krank milinin 45 derece sonrasında denge milleri tekrar yukarıya doğru yönlendirilir. Yine bu konumda en büyük (aşağıya doğru) kütle kuvvetleri ikincil piston hareketinden kaynaklanır. Yukarıya doğru yönlendirilen denge milleri bu kütle kuvvetlerini telafi eder.
İlgili sayfalar: