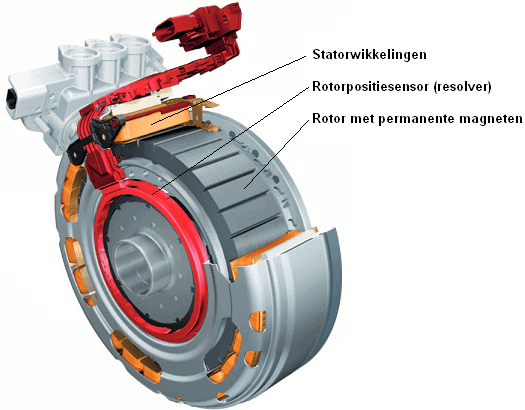
Panimula: Para sa pagpapatakbo ng kasabay na de-koryenteng motor ito ay mahalaga na ang tamang flushing sa pamamagitan ng reverse ay kontrolado. Upang matukoy kung aling coil (U, V o W) ang dapat pasiglahin, binabasa ng inverter ECU ang posisyon ng rotor, na sinusukat ng sensor ng posisyon ng rotor, na tinatawag ding "resolver".
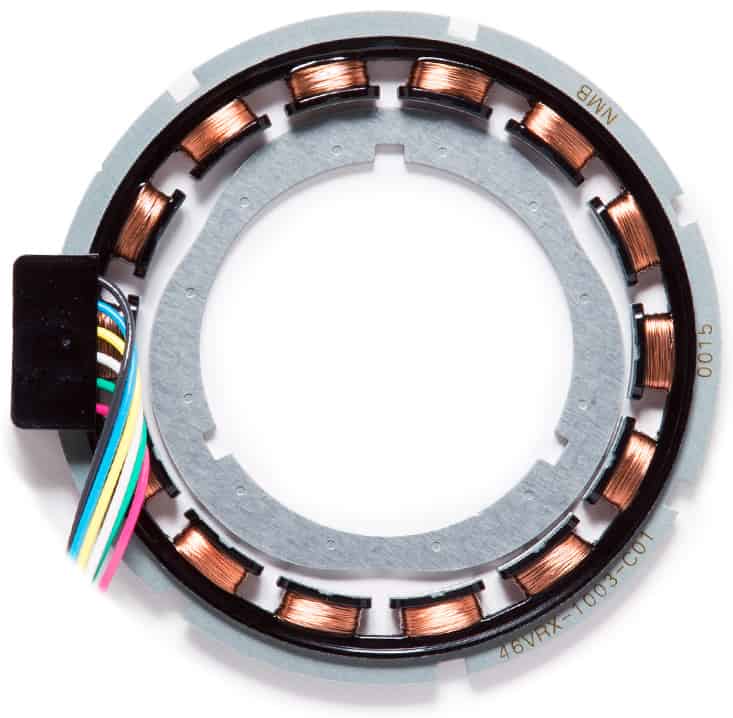
Ang solver ay binubuo ng isang panlabas na singsing na may bilang ng mga coils sa loob ng isang umiikot na sira-sira na plato. Ang distansya sa pagitan ng sira-sira na plato at ang mga coils ay patuloy na nagbabago habang ito ay umiikot.
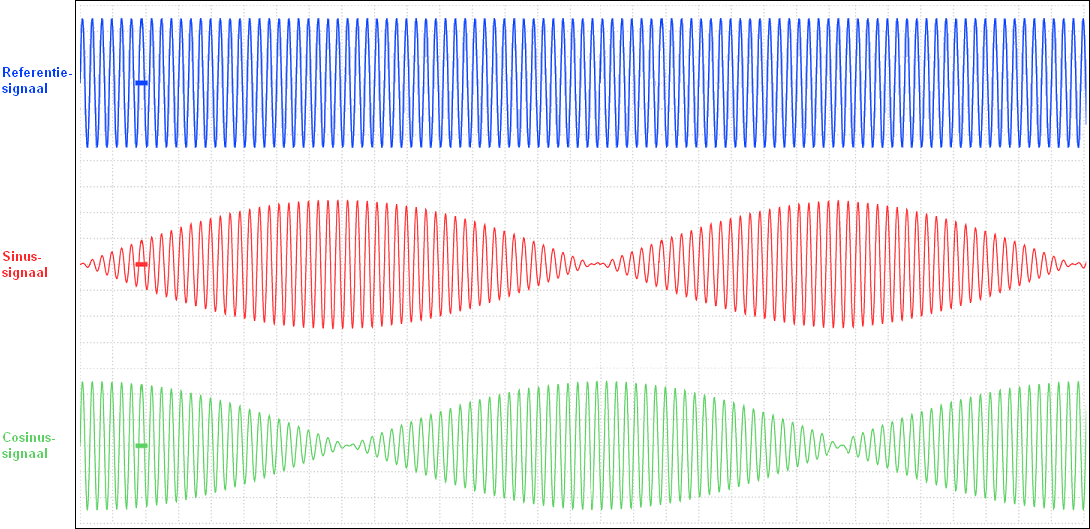
Mga signal mula sa solver: Ang ECU ay nagbibigay sa solver ng isang reference signal. Ang air gap sa pagitan ng coil at ng sira-sira ay lumilikha ng mataas o mababang sinusoidal alternating voltage. Sa isang mataas na amplitude sa pula o berdeng sinusoidal signal (tingnan ang figure sa ibaba), maliit ang air gap sa pagitan ng sira-sira at ng coil.
Gumagana ang resolver sa parehong pagtigil at habang tumatakbo ang de-koryenteng motor: sa parehong mga kaso, dapat malaman ng ECU kung saang posisyon ang rotor. Ang larawan sa ibaba ay nagpapakita ng mga teoretikal na signal. Sa katotohanan, ang dalas ay mas mataas, kaya ang pagkakaiba-iba sa amplitude ng mga signal ng sine at cosine ay malinaw na nakikita.
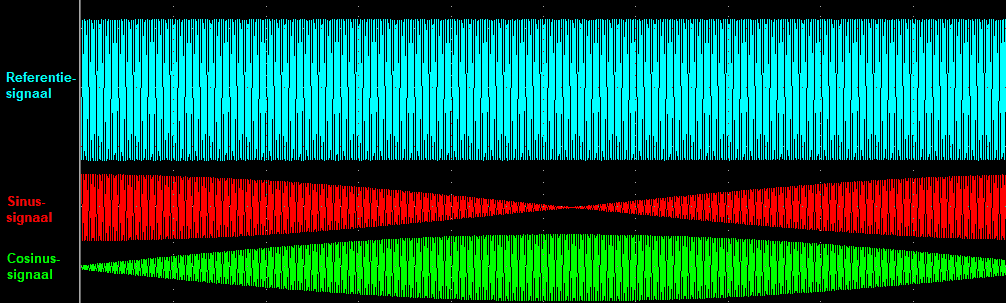
Ang dalawang larawan sa ibaba ay nagpapakita ng aktwal na pagsukat sa isang solver. Dito rin makikita natin ang reference signal sa itaas, at ang sine at cosine signal sa ibaba. Nakatigil ang unang larawan: hindi tumatakbo ang de-koryenteng motor. Ang taas ng sine signal at ang cosine signal ay nananatiling pare-pareho. Batay sa antas ng alternating voltage na ito, alam ng ECU kung nasaan ang rotor kapag nakatigil.
Nakatigil ang mga signal ng solver
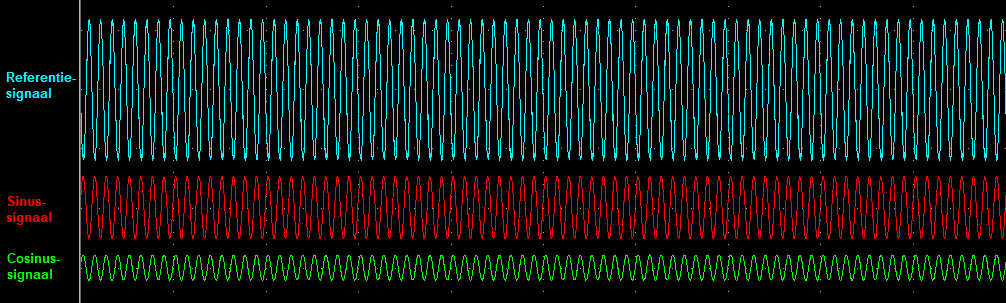
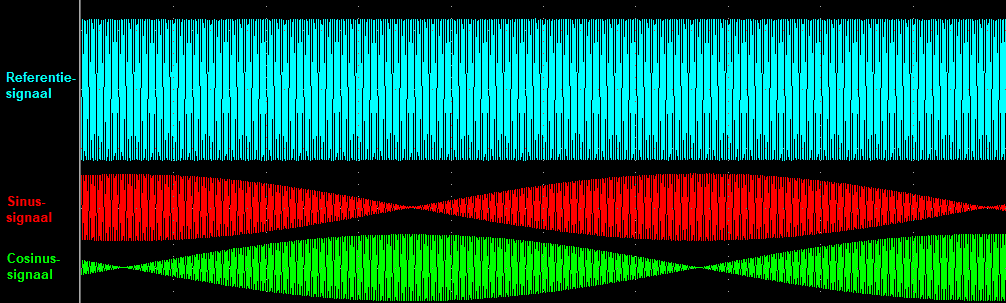
Sa susunod na dalawang larawan ang oras sa bawat dibisyon ay nabawasan. Ang dalas ng reference signal sa solver ay hindi nagbabago, ngunit sinusukat sa mas malaking yugto ng panahon sa pagsukat. Bilang resulta, nakikita natin ang mga amplitude ng sine at cosine signal na malinaw na nagbabago. Ang unang imahe ay sinusukat sa isang mababang bilis ng rotor at ang pangalawa sa isang tumaas na bilis. Habang tumataas ang bilis, ang dalas ng mga signal ng sine at cosine ay tumataas (mas maraming signal sa bawat yunit ng oras), ngunit ang amplitude (ang antas ng alternating boltahe) ay nananatiling pare-pareho.
Mga signal ng solver: mababa ang bilis
Mga signal ng solver: tumaas ang bilis
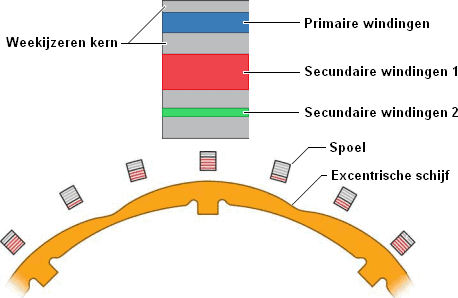
Mga bahagi ng solver: Ang solver ng VW E-Golf ay naglalaman ng 30 coils na konektado sa serye. Ang bawat coil sa solver ay binubuo ng malambot na bakal na core na may tatlong magkakaibang windings: pangunahin, pangalawang 1 at pangalawang 2.
Ang pangunahing coil (asul) ay ibinibigay sa isang mataas na dalas na alternating boltahe.
Ang bilang ng mga pangalawang pagliko (1 pula, 2 berde) ay iba sa bawat coil.
Kapag ang cam ng sira-sira na plato ay gumagalaw sa kahabaan ng coil, ang inductance sa pangalawang windings ay pinalaki. Dahil sa bilang ng mga pagliko ng pangalawang windings 1 at 2 sa bawat coil, nagreresulta din ito sa iba't ibang mga boltahe sa pangalawang windings. Ang ECU sa inverter ay maaaring kalkulahin ang posisyon ng rotor batay sa mga boltahe ng pangalawang windings 1 at 2.
Ang pagsasaayos ng solver sa rotor ay napaka-tumpak: maraming mga tagagawa ang nagrereseta na ang buong de-koryenteng motor ay dapat palitan kung may mga problema sa solver. Pagkatapos (aksidenteng) i-disassemble ang solver, o maluwag ang mga bolts sa labas ng electric motor housing, hindi na maaaring muling buuin nang tama ang resolver. Sa kasong iyon din, maraming mga tagagawa ang nagrereseta na palitan ang de-koryenteng motor.
Ang eksaktong posisyon ng rotor ng a kasabay na motor dapat na kilala sa pagtigil at habang nagmamaneho. Kung may depekto ang sensor, hindi na makakapagmaneho ang sasakyan.
Mula sa asynchronous na motor sa kabilang banda, walang pagsubaybay sa posisyon ng rotor ay kinakailangan. Ang sensor ng posisyon ng rotor ay nagpapalabas ng apat na pulso bawat rotor revolution. Sinusubaybayan ng pagsukat na ito ang maximum na dami ng slip sa pagitan ng umiikot na magnetic field sa pagitan ng stator at rotor. Ang Hall sensor ay kadalasang ginagamit bilang isang sensor. Ang Hall sensor ay nagpapadala ng mga pulso sa ECU kapag ang rotor ay umikot, ngunit hindi maaaring magsagawa ng pagsukat sa pagtigil, hindi katulad ng solver ng kasabay na motor. Pinipili din minsan ng mga tagagawa na gamitin ang solver ng kasabay na motor bilang sensor ng posisyon ng rotor.