Mga Paksa:
- Pangkalahatang tulong sa paradahan
- Kontrol ng distansya ng parke
- Reversing camera
- Tanaw sa tagiliran
- Surround view
- Tulong sa paradahan
Pangkalahatang tulong sa paradahan:
Kasama sa tulong sa paradahan ang mga sistema na tumutulong sa isang driver sa pagpasok at paglabas ng paradahan. Ang pinakakilalang sistema ng tulong sa paradahan ay ang "park distance control", na dinaglat bilang PDC. Ang system na ito ay nagpapaalam sa driver ng sasakyan tungkol sa distansya sa kotse sa likuran, o may malawak na sistema din sa harap ng sasakyan. Ang pahinang ito ay naglalarawan ng mga makabagong teknolohiya na maaaring isang extension ng park distance control o isang ganap na standalone na sistema ng tulong.
Kontrol ng distansya ng parke:
Ang Park Distance Control (PDC) ay isang sistema ng babala ng distansya na sumusukat sa mga signal kapag pumapasok at lumalabas sa mga parking space at nagbibigay ng impormasyon tungkol sa distansya sa balakid. May mga ultrasonic sensor sa rear bumper at madalas din sa front bumper (tingnan ang larawan). Ang mga ito ay naglalabas ng mga sound wave na may napakataas na frequency na hindi mahahalata sa tainga ng tao. Ang mga ultrasonic frequency na ito ay sumasalamin sa mga kalapit na bagay at natatanggap ng sensor. Sinusukat ng sensor ang oras sa pagitan ng pagpapadala at pagtanggap ng mga signal na ito. Kung mas malapit ang bagay, mas mabilis na bumabalik ang signal. Kinukuha ito ng sensor at ipinapasa sa PDC control unit (computer).
Ang computer na ito ay maaaring magpadala nito sa driver sa mga audio signal at sa parehong imahe at sound signal. Ang isang tunog ng beep ay maririnig, na nagiging mas mabilis habang papalapit ang bagay. Sa layo na humigit-kumulang 30 cm, naglalabas ito ng tuluy-tuloy na beep, na nagsasabi sa iyo bilang isang driver na kailangan mong huminto.

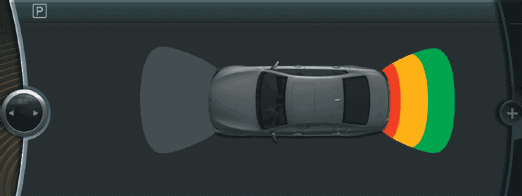
Ang mga modernong on-board na computer ay madalas na nilagyan ng opsyon kung saan ang distansya sa bagay ay ipinapakita sa isang screen. Ang mga sensor ng PDC ay pareho; kinakalkula ng control unit ang data mula sa mga sensor at pinoproseso ito sa impormasyong maipapakita ng screen.
Ang larawan sa ibaba ay nagpapakita ng PDC control unit (ECU). Ang kulay abong parisukat na ito ay naglalaman ng microcontroller, amplifier at isang AND gate. Ang microcontroller ay nagpapadala ng isang square wave boltahe na may dalas na humigit-kumulang 40 kHz (itim). Ang isang bloke ng boltahe na may mababang frequency ay pana-panahon ding output (pula/asul). Ang AND gate ay tumatanggap ng dalawang block voltages. Kapag ang parehong mga boltahe ay mataas, ang output boltahe (sa kanan ng AND gate) ay mataas. Kapag ang isa sa dalawang boltahe ay mababa, ang output ay nagiging mababa din. Ang output boltahe ay ipinadala pabalik sa microcontroller at sa transmitter sa PDC sensor. Ang transmitter ay naglalabas ng ultrasonic signal sa bilis na humigit-kumulang 300 m/s. Kapag malapit ang isang bagay, ang tunog ng ultrasonic ay sumasalamin at nirerehistro ng receiver. Tinatawag namin itong "triangulation". Ang receiver ay nagpapadala ng nabuong block signal sa ECU. Ang block signal ay pinalakas gamit ang isang amplifier at pagkatapos ay pinoproseso ng microcontroller.
Ang oras sa pagitan ng pagtanggap ng output signal mula sa AND gate at amplifier ay isang sukatan ng distansya sa bagay. Kung mas maliit ang distansya sa pagitan ng sensor ng PDC at ng bagay, mas maikli ang oras. Kinokontrol ng microcontroller ang buzzer o nakikipag-ugnayan sa ibang mga control unit sa pamamagitan ng CAN bus.
Ang circuit diagram (VAG) sa ibaba ay nagpapakita ng komunikasyon sa pagitan ng mga control unit, mga input sa mga switch at mga output sa, bukod sa iba pang mga bagay, ang buzzer.
Ang PDC control unit (J446) ay tumatanggap ng bilis ng pagmamaneho at reverse signal sa pamamagitan ng CAN bus. Ang PDC control unit ay nagpapadala ng modulated block voltage sa pamamagitan ng koneksyon T12/11 sa cable splice (X86 sa rear bumper) na nakakonekta sa lahat ng PDC sensors (G203, G334, G335 at G206). Ang bawat PDC sensor ay may sariling signal wire (sa pamamagitan ng pin 2) papunta sa ECU. Higit pa rito, ang lupa ng bawat sensor ay konektado sa isang ground weld (352).
Kapag na-detect ng isa o higit pang mga sensor ang isang bagay, ina-activate ng control unit ang buzzer (H15). Depende sa distansya sa bagay, ang buzzer ay naglalabas ng mas mabilis o mas mabagal na intermittent sound signal.

Salamat sa pakikipag-usap sa diagnostic interface (J533), posibleng gawin ang mga sumusunod na diagnostic function:
- query fault memory
- Ayusin ang coding ng control unit (hal. pagkatapos palawakin ang system na may mga PDC sensor sa harap o pagkatapos mag-install ng tow bar)
- ayusin ang volume ng buzzer
- Tanungin ang mga bloke ng sinusukat na halaga ng, bukod sa iba pang mga bagay, ang distansya mula sa lahat ng mga sensor sa bagay, ang kinakalkula na distansya at ang oras ng pag-stabilize ng transmitter at receiver.
Reversing camera:
Bilang karagdagan sa kontrol sa distansya ng parke, ang tulong sa paradahan ay maaari ding nilagyan ng reversing camera. Sa sandaling ilagay ng driver ang sasakyan sa reverse gear o pinindot ang isang pindutan sa interior, ang camera sa likuran ng sasakyan ay isinaaktibo. Kadalasan ang screen ng radyo o on-board na computer ay nagpapakita ng larawan.
Ang larawan sa ibaba ay nagpapakita ng isang BMW display na may larawan sa likuran ng sasakyan. Sa kanan ng larawan ng camera ay isang sasakyan na may tatlong bahaging grid sa harap at likuran; Ipinapakita nito ang distansya sa isang bagay na inirehistro ng mga sensor ng PDC.
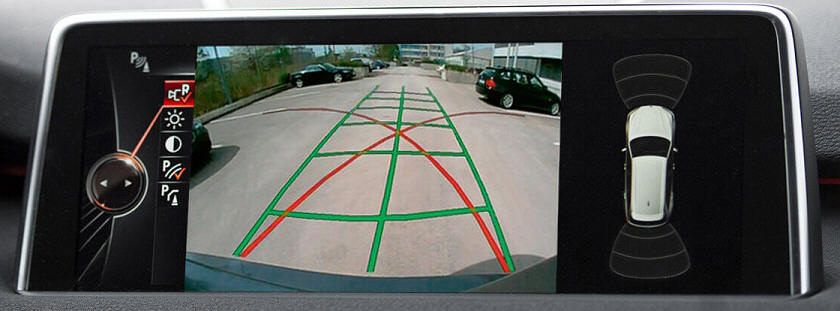
Makikita ang pula at berdeng mga linya sa reversing camera image. Ang mga pulang linya ay nagpapakita ng posibleng direksyon kung saan maaaring imaneho ang sasakyan; Sa maximum na pagpipiloto, susundan ng mga gulong ang pulang linya sa labas ng liko. Ang berdeng grid ay sumusunod sa direksyon kung saan nakabukas ang mga manibela; sa sandaling ito ang mga gulong sa harap ay diretso sa unahan. Kapag pinihit ng driver ang manibela, ang mga berdeng linya ay nagpapahiwatig ng aktwal na mga linya ng pagmamaneho. Ang steering angle sensor ay nagrerehistro ng posisyon ng manibela.
Ang reversing camera ay minsan ay madaling makita at kadalasang matatagpuan malapit sa plaka ng lisensya at/o sa hawakan upang buksan ang tailgate. Minsan pinipili ng mga tagagawa na i-mount ang camera sa labas ng paningin. Ang larawan sa ibaba ay nagpapakita ng reversing camera ng VW Golf, na may de-koryenteng motor na itinatagilid ang VW emblem upang ilipat ang camera palabas. Awtomatikong natitiklop pabalik ang emblem kapag nagmaneho ka muli. Hindi lamang inilagay ang camera sa labas ng paningin, ang lens ay mas mabilis ding madumi.

Tanaw sa tagiliran:
Kapag nabaligtad ka sa pagitan ng dalawang sasakyan o malalaking bagay, kailangan mong magmaneho nang kaunti upang tumingin sa kaliwa at kanan. Ito ay mas madali sa isang side view camera (tinatawag din na corner view); ang mga camera sa kaliwa at kanan sa bumper sa harap ay nagpapadala ng larawan sa screen sa dashboard. Ipinapakita ng larawan ang view mula sa mga sulok na camera. Sa kasamaang palad, ang mga camera ay hindi maaaring i-mount nang hindi nakikita. Ang mga kotse na nilagyan ng side view camera ay may (madalas) na itim na lens sa bumper. Ang larawan sa ibaba ay nagpapakita ng front bumper ng isang BMW na may kaliwang camera.


Surround view:
Ang pinaka-marangyang sistema ng tulong sa paradahan ay walang alinlangan na kasama ang "surround view", na kilala rin bilang top view, 3D o bird-view. Ang bawat tatak ay nagbibigay ng sarili nitong pangalan at katangian sa system. Ginagamit na namin ngayon ang pangalang surround view.
Sa surround view, ang tuktok ng kotse ay ipinapakita sa screen. Parang may camera na nakatingin sa bubong ng sasakyan at sa paligid. Ang kotse ay isang simulation at ang kapaligiran ay naitala ng ilang (karaniwang apat) na mga camera na binubuo.
Ang sumusunod na tatlong larawan (mula sa BMW) ay nagpapakita ng larawang nakikita ng driver. Kapag paradahan, malinaw na nakikita ang paghihiwalay ng parking space at mga bagay tulad ng mga poste, atbp. Kapag binabaligtad, maaari kang mag-zoom in sa likuran; Dito makikita mo ang mga halaman. Itinatala ng mga kumbensyonal na sensor ng PDC ang distansya sa mga halaman. Minarkahan ng computer ang distansyang ito na may pulang kulay.

Sa pasulong na paradahan, maaari ding ipakita ng system ang paligid at ang harapan. Ang mga sensor ng PDC ay tumutulong din ngayon upang matukoy ang distansya sa bakod.

Ang parallel parking sa gilid ng bangketa ay maaaring, kung hindi maingat ang driver, ay magdudulot ng pinsala sa mga gulong at rims. Nag-aalok din ang surround view ng solusyon ngayon; Salamat sa magandang pangkalahatang-ideya ng tanawin sa kalye, maaari kang pumarada nang diretso at malapit sa gilid ng bangketa. Ginagawang posible ng mga pinakabagong development mula sa BMW na baligtarin ang larawan ng camera at gayahin ang sasakyan.

Ang susunod na tatlong larawan ay nagpapakita ng mga lugar kung saan madalas na matatagpuan ang mga camera.



Tulong sa paradahan:
Bilang extension ng parking assistance, ang tinatawag na "out-of-parking assistance" ay maaaring tumulong sa driver kapag umaalis sa parking space na paurong na may limitadong visibility. Ito ay maaaring nasa mga sitwasyon kung saan nakaparada ang sasakyan sa tabi ng pader o sa pagitan ng mga sasakyan.
Ang mga sensor sa likuran ng kotse ay nakakakita ng trapiko na dumadaan sa likod ng sasakyan at posibleng nagdudulot ng panganib ng banggaan. Kabilang dito ang lahat ng gumagalaw na bagay na lumalapit sa sasakyan sa isang tiyak na bilis. Kapag na-detect ng parking assist system ang paparating na sasakyan, may lalabas na mensahe sa display ng infotainment system. Karaniwang idinaragdag dito ang isang acoustic sound signal. Kung babalewalain ng driver ang mga signal na ito at magmaneho paatras, pisikal na mamagitan ang system sa pamamagitan ng pagpapaandar ng preno upang pabagalin ang sasakyan.
