Mga Paksa:
- Panimula
- AC electric motor (kasabay, may permanenteng magnet)
- AC control ng kasabay na motor
- AC electric motor (asynchronous, squirrel cage motor)
- Mapa ng kahusayan ng kasabay at asynchronous na de-koryenteng motor
Panimula:
Ang de-koryenteng motor ay ginagamit upang magmaneho ng hybrid o ganap na de-kuryenteng sasakyan. Ang de-koryenteng motor ay nagko-convert ng elektrikal na enerhiya (mula sa baterya o range extender) sa paggalaw upang himukin ang mga gulong. Bilang karagdagan, ang de-koryenteng motor ay maaari ring i-convert ang kinetic energy sa elektrikal na enerhiya kapag nagpepreno ang makina: regenerative braking. Sa kasong iyon, ang electric motor ay gumagana bilang isang dynamo. Dahil sa dalawang pag-andar na ito, tinatawag din nating "electric machine" ang de-koryenteng motor.
Ang mga opsyon para sa paglalagay ng de-koryenteng motor sa isang hybrid na sasakyan ay:
- Sa combustion engine, kung saan ang paghahatid ay nakamit sa pamamagitan ng isang multi-belt o direkta sa pamamagitan ng crankshaft;
- Sa pagitan ng engine at gearbox: ang input shaft ng gearbox ay hinihimok ng electric motor;
- Pinagsama sa gearbox;
- Sa kaugalian;
- Sa mga wheel hub (hub motor).
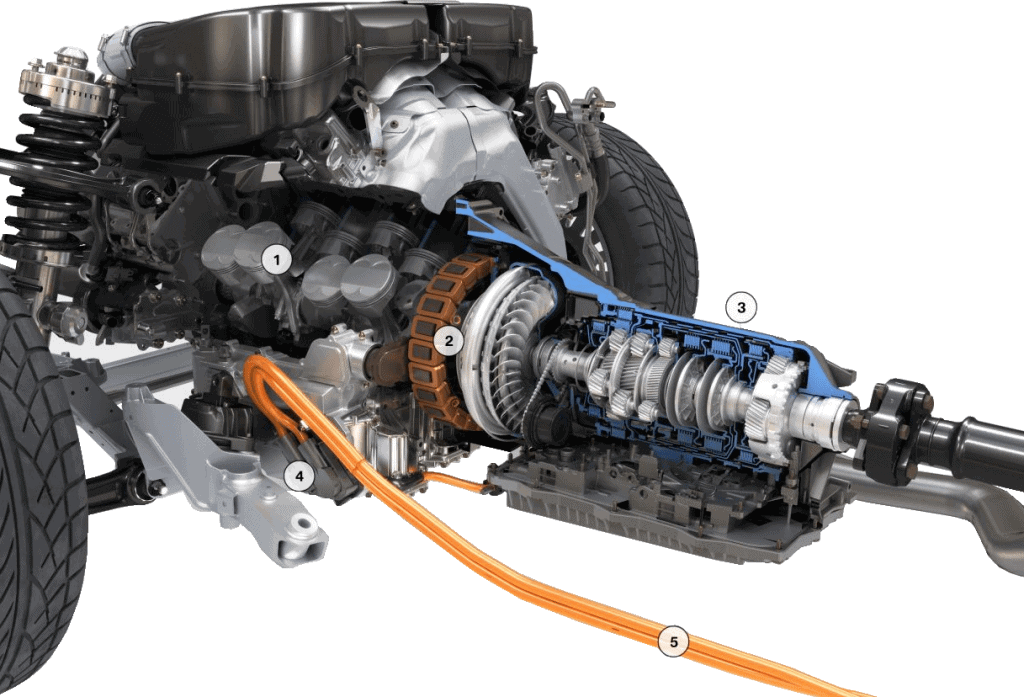
Ang de-koryenteng motor ng isang ganap na de-kuryenteng kotse ay madalas na naka-mount sa likurang ehe. Ang larawan sa ibaba ay nagpapakita ng de-koryenteng motor na may inverter sa isang cylindrical na pabahay at huling drive ng isang Tesla.

AC electric motor (kasabay, may permanenteng magnet):
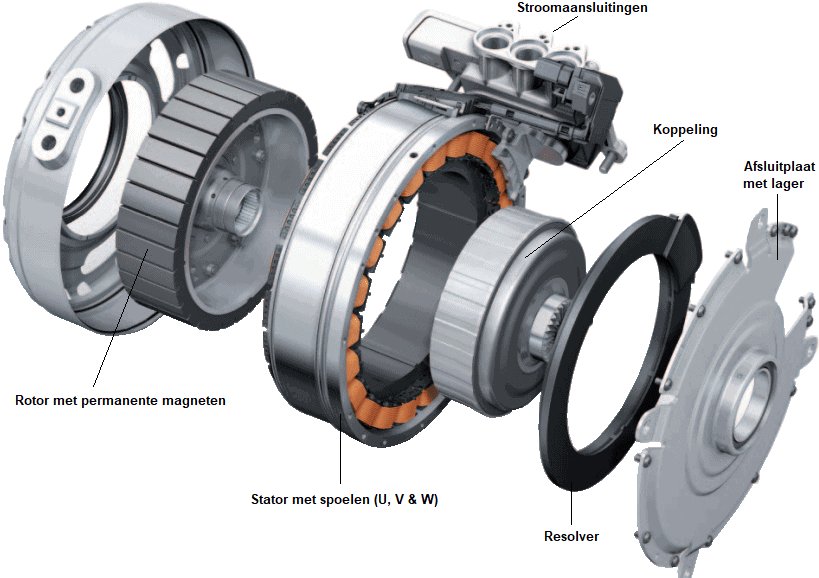
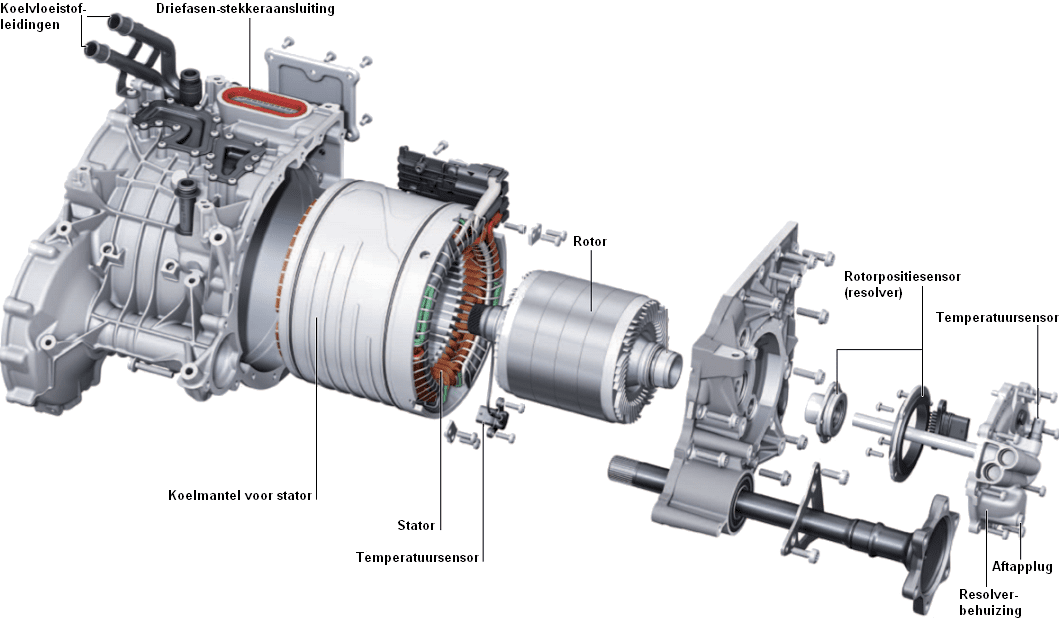
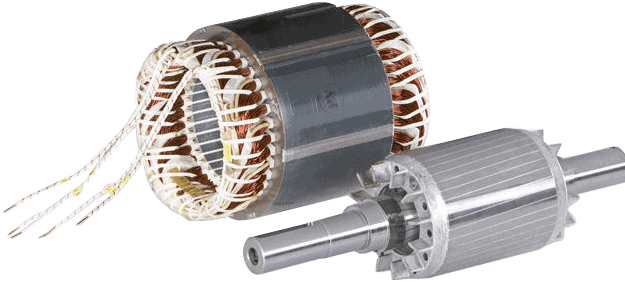
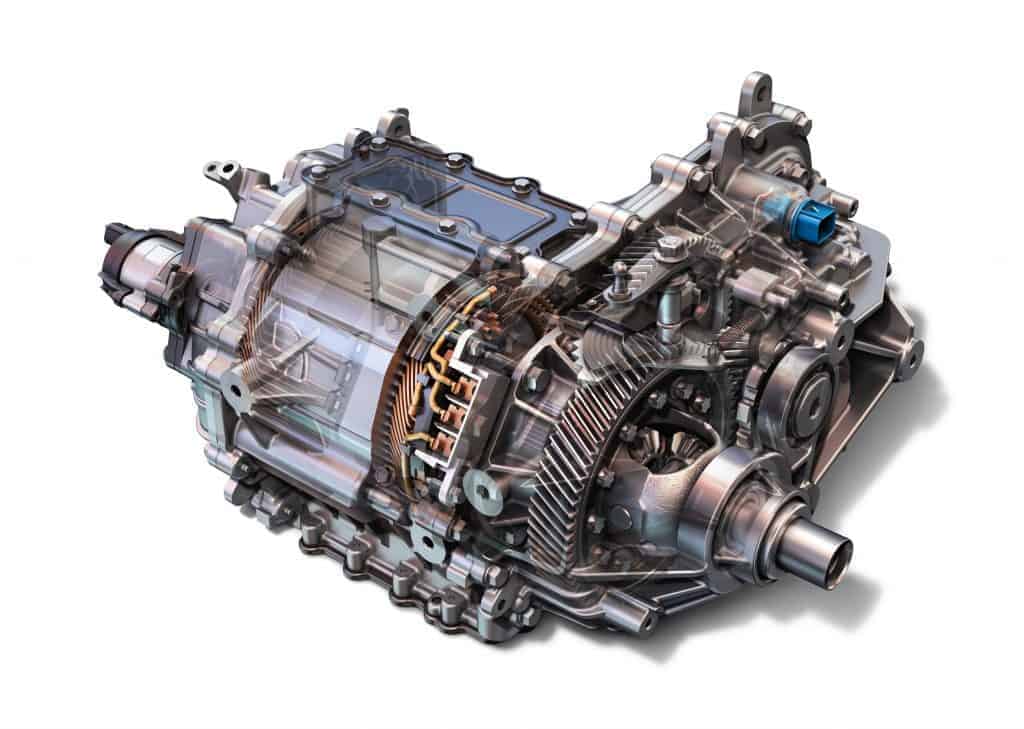
Ipinapakita ng sumusunod na larawan ang mga bahagi ng isang Audi (kasabay) na de-koryenteng motor. Ginagamit ang ganitong uri sa mga hybrid na variant ng A6 at A8. Ililista namin sa madaling sabi ang mga bahagi. Ang mga sangkap na ito ay inilarawan nang detalyado sa mga sumusunod na talata.
Ang rotor na may permanenteng magnet ay magsisimulang umikot bilang resulta ng pagbabago sa magnetic field sa stator. Ang rotor ay konektado sa clutch, na maaaring kumonekta o idiskonekta ang combustion engine at electric motor (kasabay ng isang clutch (hindi ipinapakita)) sa iba't ibang mga kondisyon ng operating. Ang posisyon ng rotor ay tinutukoy ng resolver sinusukat: ang data na ito ay mahalaga para sa mga driver ng IGBT na makontrol ang stator coils sa tamang oras.
Ang de-koryenteng motor na may permanenteng magnet ay maaaring kontrolin ng parehong DC (direktang boltahe) at AC (alternating boltahe).
Ang kasabay na motor ay isa sa mga pinakakaraniwang ginagamit na de-koryenteng motor sa hybrid o ganap na de-kuryenteng mga sasakyan. Ang ganitong uri ng de-koryenteng motor ay binubuo ng isang stator na may mga paikot-ikot at isang rotor na may ilang mga permanenteng magnet. Ang rotor ay umiikot sa parehong bilis ng magnetic field ng stator. Ang kasabay na motor ay maaaring kontrolin tulad ng sumusunod:
- AC: kinokontrol ng isang sinusoidal signal (alternating current).
- DC: kinokontrol gamit ang isang square o trapezoidal signal (direct current)
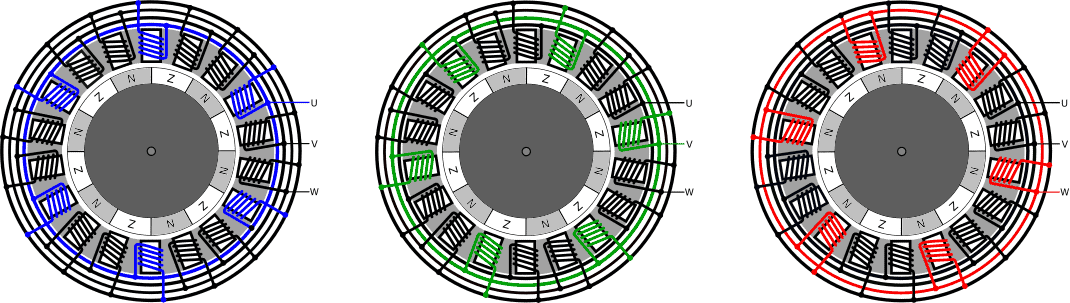
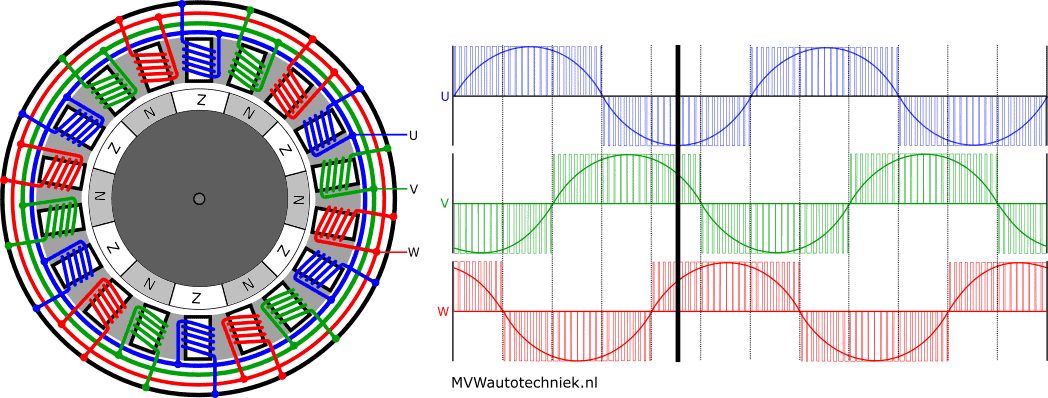
Ang stator ng synchronous motor ay binubuo ng tatlong stator coil group: U, V at W. Ang bawat grupo ay naglalaman ng tatlong set ng anim na coils na konektado sa parallel na ibinahagi sa buong circumference ng stator. Ang bawat ikatlong coil ay kabilang sa parehong serye.
- U-coils: asul
- V-coils: berde
- W coils: pula
Ang rotor ay naglalaman ng ilang permanenteng magnet. Sa pamamagitan ng halili na pagpapalakas ng mga coils sa stator, ang isang umiikot na magnetic field ay nalikha. Ang rotor ay sumusunod sa umiikot na patlang at samakatuwid ay umiikot.
AC control ng kasabay na motor:
Ang AC control ay gumagamit ng frequency-controlled na kontrol o sinusoidal commutation. Ang stator coils ay binibigyan ng alternating three-phase sine wave voltage upang paikutin ang rotor.
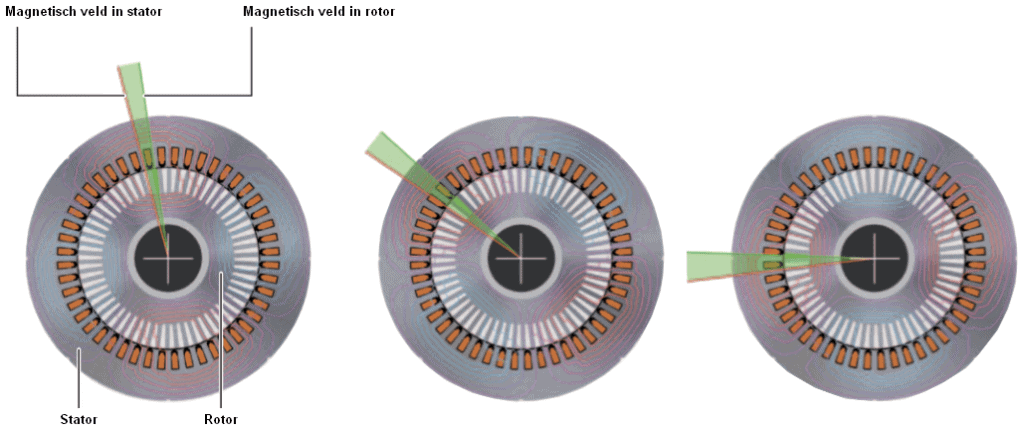
Ipinapakita ng imahe sa ibaba ang posisyon ng rotor na may pinakamataas na nasasabik na U-coil. Bilang resulta ng magnetic field, ang mga north pole ay nakaposisyon mismo sa tapat ng energized U-coils. Ang cursor sa graph sa tabi ng de-koryenteng motor ay nagpapahiwatig ng kontrol ng mga coil sa sandaling iyon.
Para sa iyong impormasyon: ang rotor sa paliwanag ay umiikot kapag kinokontrol ang stator coils clockwise.
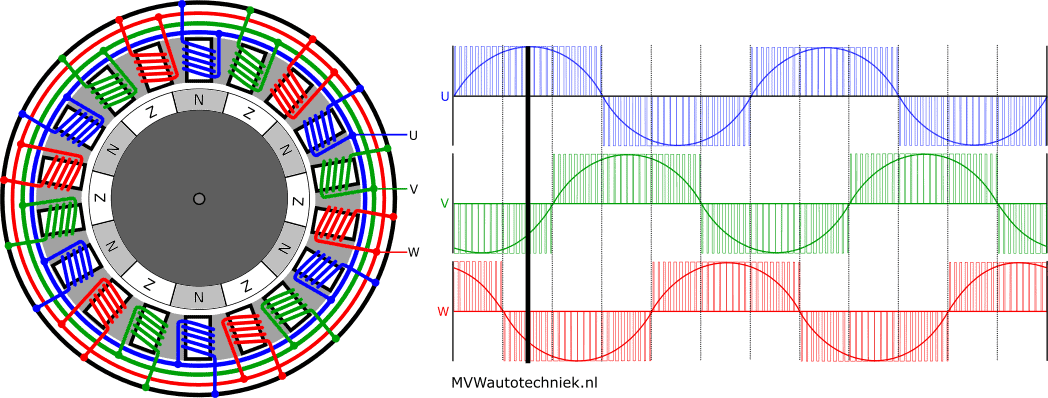
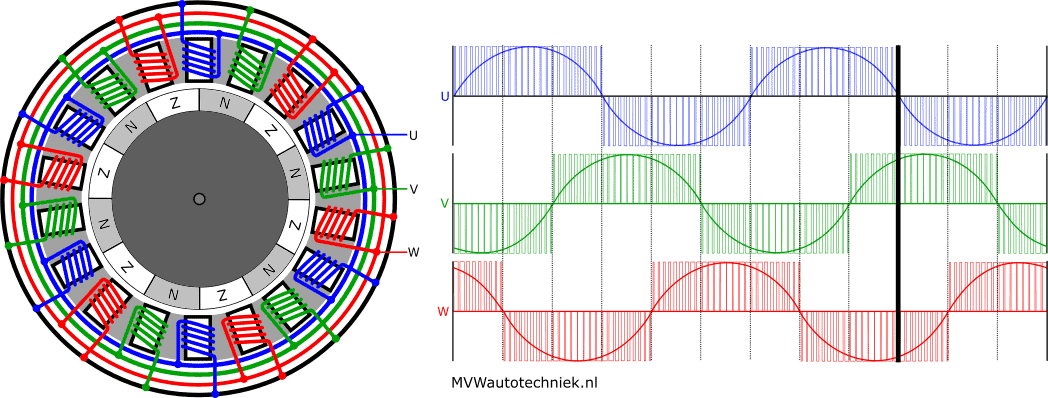
Sa sumusunod na larawan, ang sine wave, i.e. ang alternating current sa pamamagitan ng U-coil, ay pinakamataas na negatibo. Sa panahon ng kontrol na ito, ang mga south pole ng rotor ay direktang nasa tapat ng energized (U) stator coils.
Mayroong talagang maliit na puwang ng hangin sa pagitan ng hilaga at timog na mga pole ng rotor. Sa panahon ng pagbabago mula sa timog hanggang sa hilagang poste, nagbabago ang kasalukuyang direksyon sa U-coil. Dagdag pa:
- Ang kasalukuyang sa pamamagitan ng V-coil (berde) ay halos maximally positibo; ang north pole ay halos katapat din ng coil.
- Ang kasalukuyang sa pamamagitan ng W coil ay naging pinakamataas na negatibo at tumataas. Ang south pole ay umikot lampas sa coil.
Upang magbigay ng impresyon kung paano dumadaloy ang kasalukuyang, ipinapakita ng animation sa ibaba ang pag-ikot ng rotor dahil sa alternating current.
AC electric motor (asynchronous, squirrel cage motor):
Ang squirrel cage o short-circuit armature electric motor ay isang asynchronous na motor. Ang pagkakaiba sa pagitan ng kasabay na motor na may permanenteng magnet at ang asynchronous na motor ay nasa rotor: ito ay isang malambot na bakal na drum na may mga conductor sa longitudinal na direksyon. Ang rotor ay tumatakbo nang asynchronously sa stator, na nangangahulugan na mayroong pagkakaiba sa bilis sa pagitan ng rotor at ang magnetic na bilis ng stator. Ang stator ay eksaktong pareho.
Ang rotor ng asynchronous electric motor ay binubuo ng mga short-circuited coils; ang U, V at W coils ay konektado sa isa't isa sa isang gilid. Kapag ang rotor ay nasa stator rotating field, isang induction voltage ang nalilikha sa rotor coils. Dahil ang mga rotor coils ay short-circuited sa isa't isa, isang kasalukuyang dumadaloy sa kanila. Ang kasalukuyang ito ay nagiging sanhi ng rotor upang makabuo ng isang magnetic field, na lumilikha ng isang metalikang kuwintas. Dahil ang pagpapatakbo ng asynchronous electric motor ay batay sa batas ng induction, tinatawag din namin itong induction motor.
Ang inihatid na metalikang kuwintas ay nakakaapekto sa slip sa pagitan ng umiikot na magnetic field sa stator at ang bilis ng rotor.
Ang asynchronous na motor ay may isang bilang ng mga pakinabang at disadvantages kumpara sa kasabay na motor.
Mga Bentahe:
- medyo simple, matatag at murang rotor;
- mataas na metalikang kuwintas sa mababang bilis.
Kahinaan:
- mas mababang power density (bawat masa) at kahusayan (efficiency). Ang mga alon sa mga short-circuited rotor coils ay nagbibigay ng karagdagang pagkawala ng rotor;
- Ang bilis ay hindi makokontrol ng tumpak dahil ito ay nakasalalay sa pagkarga. Sa sarili nito, hindi ito kailangang maging isang kawalan: na may isang mahusay na sistema ng kontrol ang bilis ng asynchronous na motor ay maaari ding iakma;
- mataas na panimulang kasalukuyang.
Ang posisyon ng rotor at bilis ng asynchronous na motor ay sinusukat ng a sensor ng posisyon ng rotor. Ang mga sensor ng hall ay kadalasang nagbibigay ng hindi bababa sa apat na pulso bawat rebolusyon ng rotor upang maihatid ang posisyon at bilis ng rotor. Hindi namin tinatawag na solver ang ganitong uri ng sensor ng posisyon ng rotor, tulad ng kaso sa kasabay na motor.
Hindi tulad ng kasabay na motor, ang rotor position sensor ay hindi kinakailangan upang malaman ang rotor position sa standstill. Ang posisyon ng rotor ay mahalaga sa panahon ng pag-ikot: ang pag-iingat ay dapat gawin upang matiyak na ang slip sa pagitan ng magnetic rotating field at rotor ay hindi magiging masyadong malaki. Kapag masyadong mabilis ang paggalaw ng umiikot na field, maaaring magkaroon ng sitwasyon kung saan biglang gustong lumiko ng rotor sa kabilang direksyon. Ang mga puwersang nanggagaling ay maaaring nakapipinsala para sa mga mekanikal at elektrikal na bahagi.
Pinipili din ng ilang manufacturer na gumamit ng asynchronous na motor resolver nag-aaplay. Ang dahilan ay hindi ko alam. Sa anumang kaso, ang solver ay lubos na tumpak kapag nakatayo at habang tumatakbo, na maaaring makinabang sa tumpak na kontrol.
Mapa ng kahusayan ng kasabay at asynchronous na de-koryenteng motor:
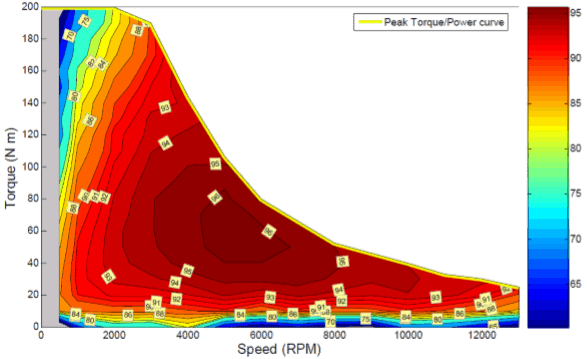
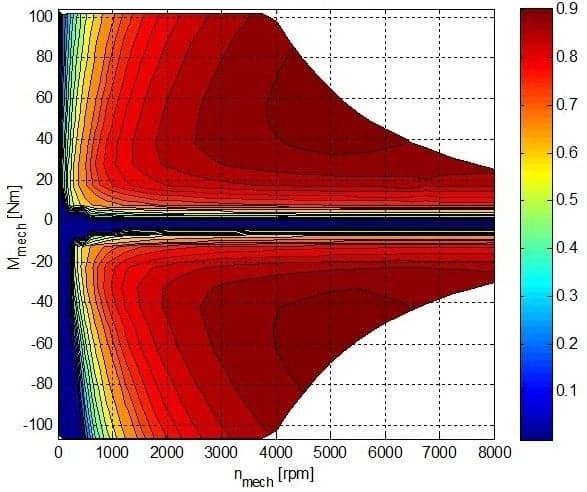
Ang mga larawan sa ibaba ay nagpapakita ng kahusayan ng kasabay na de-koryenteng motor (kaliwa) at ang asynchronous na de-koryenteng motor (kanan).
- Ang kasabay na de-koryenteng motor ay napakahusay. Ang kahusayan ay higit sa 90% sa isang malaking lugar, na may mga peak value na hanggang 96%. Mula sa 2000 rpm, nangyayari ang pagpapahina ng field, na nagiging sanhi ng pagbaba ng maximum na metalikang kuwintas.
- Ang asynchronous na motor ay may makabuluhang mas mababang kahusayan kaysa sa kasabay na motor sa mas mababang bilis.
Mga kaugnay na pahina:
- Electric drive (Pangkalahatang-ideya)
- DC de-koryenteng motor
- inverter
- Rotor position sensor (resolver)