Subiecte:
- Echipament solar, suport și angrenaj inel
- Cutie de viteze automata
- Transmisii cu angrenaje planetare
- Calculați raportul de viteză al primei viteze
- Calculați raportul de viteză al doilea
- Calculați raportul de viteză al treilea
Angrenaj solar, purtător și angrenaj inel:
Un sistem de angrenaje planetare constă din cel puțin un set de angrenaje, fiecare cu un angrenaj solar, un suport și un angrenaj inel. Prin urmare, sunt necesare cunoștințe de bază despre funcționarea sistemului de angrenaj planetar (cum ar fi rotirea angrenajului solar, suportul cu angrenaje satelit și a angrenajului inel, vezi pagina cutie de viteze automata).
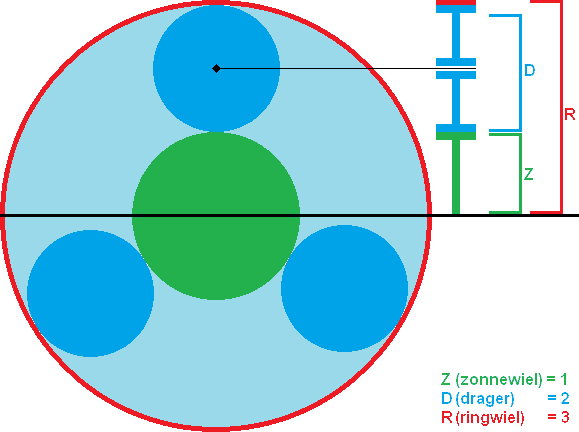
Mai jos este o imagine a unui angrenaj în care angrenajul solar este verde, suportul cu angrenajele satelit este albastru și roata roată este roșie. Este clar că setul de viteze este împărțit în două. Calculul se face cu ecuații, deci nu contează dacă totul este împărțit la doi. La urma urmei, proporțiile rămân aceleași.
În continuare pe această pagină vom calcula cu rapoartele Z, D și R. Urmând liniile care leagă diferite sisteme planetare, raportul total de transmisie al angrenajului relevant poate fi determinat folosind rapoartele tuturor Z, D și R. .
cutie de viteze automata:
O cutie de viteze automată convențională funcționează prin comutarea între diferitele sisteme de angrenaje planetare, vezi capitolul cutie de viteze automata.
Mai jos este o reprezentare schematică a patru seturi de sisteme de angrenaje planetare într-o transmisie automată. Există trei sisteme pentru treptele înainte și unul pentru marșarier. Linia roșie indică direcția forțelor prin transmisia automată; din stânga (partea motorului cu convertizor de cuplu) prin piesa completă cu sisteme planetare (linii negre) până la cuplarea arborelui elicei. Dacă te uiți cu atenție la sistemele din cutia de viteze, vei vedea că imaginea de mai sus este derivată din ele. În cutia de viteze sunt utilizate patru sisteme, fiecare cu un Z, D și R (angrenaj solar, suport și inel).

Sistemele de angrenaje planetare sunt simetrice deasupra și sub linia centrală. Nu există altă cale, deoarece interiorul se rotește în timpul mersului. Pentru a înțelege ce se întâmplă atunci când o treaptă de viteză este cuplată, părțile antrenate din sistemul planetar din imaginea de mai jos au fost, de asemenea, evidențiate în roșu:

În imaginea de mai sus, treapta 1 este cuplată. Pentru a cupla treapta 1, trebuie cuplat un ambreiaj. Acest link este afișat cu albastru. Cu cuplajul închis și cu o parte antrenată a sistemului planetar, o piesă trebuie să se rotească și ea. În acest caz, dimensiunile pieselor determină raportul de transmisie (gândiți-vă la un angrenaj mic de intrare și un angrenaj mare de ieșire; angrenajul mare se va roti apoi mai lent. Dacă angrenajul mare avea de două ori mai mulți dinți decât angrenajul mic, atunci raportul ar fi 1:2).
În principiu, acest lucru este valabil și pentru transmisia automată; dimensiunile angrenajului inel, angrenajelor solare și angrenajelor satelit sunt diferite în toate cele patru sisteme. Acum vă puteți imagina probabil că atunci când un alt ambreiaj este alimentat (de exemplu, sistemul din stânga), viteza arborelui de ieșire s-a schimbat.
Mai departe pe această pagină, imagini, explicații și calcule explică modul în care sistemele de angrenaje planetare din transmisia automată sunt schimbate în timpul conducerii.
Transmisii sistemului de angrenaje planetare:
Acum ne vom uita la jumătatea superioară a cutiei de viteze (deoarece cutia este simetrică deasupra și dedesubt, vezi imaginea de mai jos). Din această imagine vom determina transmisiile mai târziu pe pagină. Deasupra sistemelor scrie ce număr este sistemul; de la 1 la 3 și sistemul R (invers).
Fiecare galaxie are propriul Z, D și R. Acest lucru nu este afișat în imagine, dar dacă te uiți din nou la imaginea din partea de sus a acestei pagini, o vei recunoaște. Acest lucru va fi considerat cunoscut mai târziu pe această pagină.
În partea stângă jos a imaginii vedeți cuplarea „K4”, această cuplare asigură că două părți ale sistemului sunt conectate simultan; sistemul 3 este conectat la sistemele 1 și 2. Nicio altă conexiune nu a fost închisă, astfel încât întregul sistem este „blocat”. Turația motorului este transmisă 1 la 1 roților vehiculului, fără raport de transmisie; Numim asta preț direct. Aceasta este în treapta a patra.
În mașinile cu o cutie de viteze manuală, a patra treaptă este adesea și cu transmisie directă. Și aici turația motorului este transmisă 1 la 1 roților.
Diferența de turație a arborelui de intrare (motor sau convertor de cuplu) și a arborelui de ieșire (vehicul) se numește raport de transmisie.

Prima treaptă de viteză este cuplată.
Prin asigurarea suportului sistemului I (folosind cuplajul K1), o forță poate fi transferată de la angrenajul solar către suport. Transportorul este conectat la vehicul, astfel încât acum există o legătură directă între motor și cutia de viteze. Dimensiunile pieselor determină un raport de transmisie (mai multe despre asta mai târziu).
Linia roșie indică progresia forței. Linia verde indică ce alte componente rulează, deoarece aceasta este conectată direct la linia roșie. Aceste piese se rotesc, dar pentru că nu este nici un ambreiaj alimentat, nu li se întâmplă nimic. Pur și simplu aleargă inactiv. Linia albastră arată ce este fixat atunci când cuplajul K1 este alimentat. Nu numai suportul sistemului 1 este apoi fixat, ci și suportul sistemului 3 și angrenajul solar al sistemului R sunt blocate.

După cum sa explicat, ambreiajul K1 este alimentat la trecerea în prima treaptă de viteză. Când treceți în treapta a doua, ambreiajul K1 va fi decuplat și un alt ambreiaj va fi alimentat. Acest lucru poate fi văzut în tabel.
La trecerea în treapta a doua, ambreiajul K2 va fi alimentat. Rotul dinţat al sistemului 2 este apoi fixat. Deoarece angrenajul solar al sistemului 2 este fix și angrenajul solar este antrenat, suportul se va roti. Acest transportator va conduce la rândul său sistemul 1. În sistemul 1, inelul nu este blocat de această dată, ci antrenat de un alt sistem. În acest caz, viteza de ieșire (linia vehiculului) va avea, prin urmare, o viteză mai mică decât atunci când a fost schimbată prima treaptă de viteză.

Acest lucru este clarificat în continuare pe această pagină cu imagini, explicații și calcule.
Calculați raportul de viteză al primei viteze:
Conform tabelului de mai jos, legătura K1 este închisă. Prin urmare, inelul este blocat. Forța de antrenare a motorului trece prin angrenajul solar și prin intermediul suportului către vehicul. Sunt date și rapoartele, și anume 1,00 pentru angrenajul solar și 3,00 pentru inelul din sistemul 1. Vom calcula cu aceasta.
Formula de bază pentru calcularea raporturilor de transmisie ale sistemelor de angrenaje planetare este următoarea:
ω înseamnă omega și este viteză unghiulară în timp ce se întoarce.
Pentru că calculăm cu sistemul 1, punem un 1 după toate. Schimbăm acest număr pentru următoarele sisteme. Mai ales în cazul sistemelor multiple (unde un sistem îl conduce pe celălalt), trebuie remarcat în acest fel, pentru că altfel devine foarte confuz.
Mai jos este diagrama primei trepte de viteză. Pentru claritate, Z (angrenajul solar), D (purtător) și R (rotul dințat) sunt desenate în albastru.


Acum completăm formula de bază pentru primul sistem. Omega sunt necunoscute și purtătorul stă nemișcat. Deci nu putem completa nimic pentru asta. Z1 și D1 sunt cunoscute, așa că le vom completa. R1 este staționar, așa că îl tăiem. Nu adăugăm nimic la formulă.
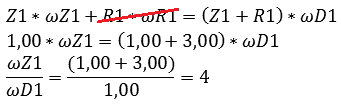
Acum vedeți că raportul de viteză al primei trepte este 4.
In tehnologia auto nu se intampla asta niciodata, ar fi intotdeauna putin peste sau sub 4, pentru ca altfel treptele se ating mereu pe aceleasi suprafete (uzura suplimentara). Dar aici este mai ușor de calculat ca exemplu. Acum puteți vedea și că omega-urile sunt cunoscute!
ωZ1 = 4
ωD1 = 1
Aceste omegas sunt vitezele unghiulare ale axelor din sistem. Omega-urile nu sunt cu adevărat importante în prima treaptă de viteză, dar atunci când se calculează sistemele cu antrenare dublă (după cum va deveni clar în treapta a doua), ele sunt importante.
Calculați raportul de viteză al doilea:
La calcularea raportului de transmisie al celei de-a doua trepte de viteză, trebuie luat în considerare faptul că primul sistem este dublu antrenat; angrenajul solar al sistemului 1 este antrenat de motor, iar suportul este antrenat de sistemul 2. Acest lucru duce acum la o viteză diferită a vehiculului decât în situația în care roata dințată era staționară (cum ar fi cu prima treaptă de viteză).

Când calculăm, începem întotdeauna cu sistemul care este doar condus. În acest caz este sistemul 2, deoarece este antrenat doar de motor prin angrenajul solar.
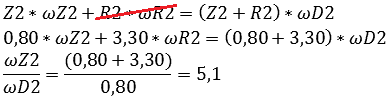
Transmisia realizată de cel de-al doilea sistem este 5,1. Aceasta nu este transmisia dintre motor și roți, ci între motor și sistemul 1. Acum vom calcula raportul de transmisie al sistemului 1 cu datele din sistemul 2, deoarece acum se cunosc omega:
ωZ2 = 4,1
ωD2 = 0,8
Dacă vă uitați acum la diagramă, veți vedea că angrenajele solare ale sistemelor 1 și 2 sunt conectate între ele. Suportul sistemului 2 și roata dințată a sistemului 1 sunt de asemenea conectate între ele. Omega-urile părților conectate sunt aceleași, așa că apoi putem spune:
ωZ2 = ωZ1 = 4,1
ωD2 = ωR1 = 0,8
Este foarte important ca acest lucru să fie privit cu atenție! Urmați întotdeauna liniile din diagramă.
Acum introducem aceste omegas în calculul sistemului 1.
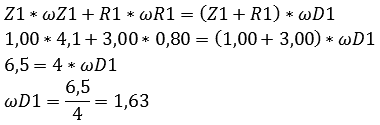
Acum putem determina raportul final de antrenare prin împărțirea omega de intrare la omega de ieșire. Dacă ne uităm la diagramă, vedem că omega a sistemului de angrenaj solar 2 este de intrare și omega a sistemului de purtător 1 este de ieșire.
Raportul total de transmisie al treptei a 2-a este deci 2,52.
Calculați raportul de viteză al treilea:
Atunci când se calculează a treia treaptă de viteză, trebuie să se țină cont de faptul că toate cele trei sisteme funcționează împreună. Începeți întotdeauna cu sistemul de acționare unică. În acest caz este al treilea:

Angrenajul solar al sistemului 3 este fix, deci nu participă. Apoi introduceți restul tuturor valorilor:
Cu aceasta obtinem:
Apoi trecem la sistemul 2. Introduceți omegas-urile cunoscute pentru sistemul 3 în calculul sistemului 2:
Acum trecem la sistemul 1. Și aici sunt introduse omega cunoscute:
Până la urmă obținem:
Aceasta înseamnă că raportul total de viteză al treptei a treia este de 1,38.
Calculați raportul de viteză al patrulea:
În treapta a patra, ambreiajul K4 este închis. Aceasta înseamnă că angrenajele solare ale sistemelor 1, 2 și 3 sunt cuplate simultan la motor. Întregul sistem este acum blocat. Toate omega-urile sunt egale.
Dacă toate omega-urile sunt egale, nu este posibil niciun raport de transmisie. Turația motorului este transmisă direct la roți. Numim asta preț direct.