Conversia tensiunilor senzorilor analogici în mesaj digital
Conversia semnalului generatorului de impulsuri în mesaj digital
Semnale de ieșire
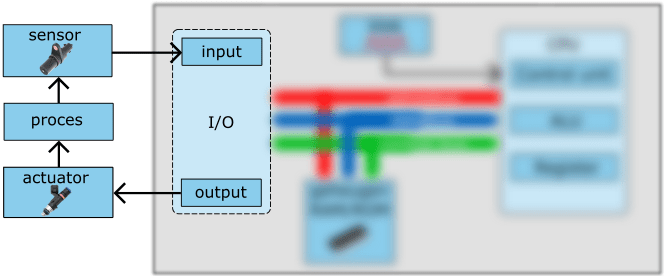
Introducere: În cele mai multe cazuri, semnalele electrice de la senzori trebuie ajustate înainte de a fi prezentate procesorului. Actuatoarele sunt controlate de cealaltă parte a computerului. Acestea sunt adesea circuite inductive care comută adesea curenți mari. Hardware-ul pentru reglarea semnalelor senzorilor și a curenților actuatorului se numește circuite de interfață. Un circuit de interfață asigură translația unei tensiuni analogice într-o tensiune digitală.
senzori transmite o tensiune cu un curent scăzut. Circuitul de interfață convertește tensiunea într-o valoare digitală (0 sau 1). Intensitatea curentului este scăzută cu un semnal senzor;
Actuatoare necesită un curent mai mare. Pentru a actuatoare de control, sunt situate în ECU sub formă de (o combinație de) tranzistori sau FET, care sunt denumite și „driver”. Vom discuta acest lucru mai detaliat în secțiunea „semnale de ieșire”.
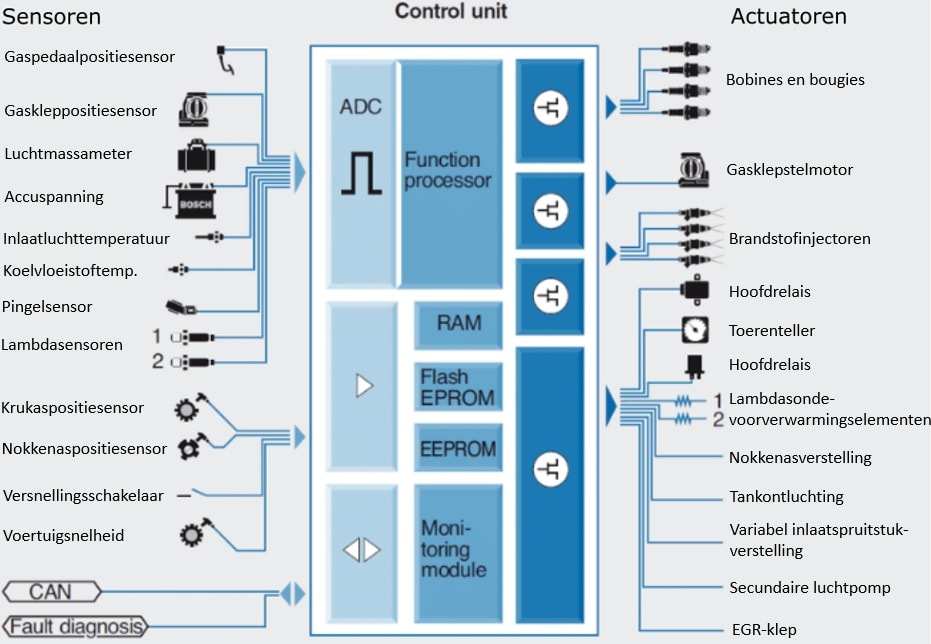
Imaginea de mai jos prezintă senzorii și actuatoarele unui sistem de management al motorului (pe benzină). Grupul superior de senzori (de la senzorul de poziție a pedalei de accelerație până la senzorii lambda) se încadrează în categoria „analogică”. Aceasta înseamnă că tensiunile senzorului de intrare trebuie mai întâi digitizate în ADC (convertor analog – digital). Grupul inferior de senzori (de la senzorul de poziție a arborelui cotit la senzorul de viteză al vehiculului) își oferă deja semnalul digital. Semnalele pornit-oprit sau tensiunile de bloc sunt aplicate direct CPU-ului.
Actuatoarele din dreapta sunt controlate de o treaptă de ieșire. O etapă de ieșire, numită și driver, constă dintr-un circuit de mai multe tranzistoare pentru a genera o tensiune și un curent utilizabil dintr-un impuls de control de la computer pentru a controla actuatorul.
Sistem de management al motorului cu senzori (stânga) și actuatoare (dreapta)
Tranzistor Tranzistor Logic (TTL): Procesorul funcționează cu tensiuni de 5 volți. Prin urmare, tensiunile de intrare și de ieșire sunt limitate la un interval de la 0 la 5 volți (nivel TTL, prescurtat de la Tranzistor Transistor Logic). Pentru semnalele care deviază de la acest nivel de tensiune, are loc o reglare într-un circuit de interfață.
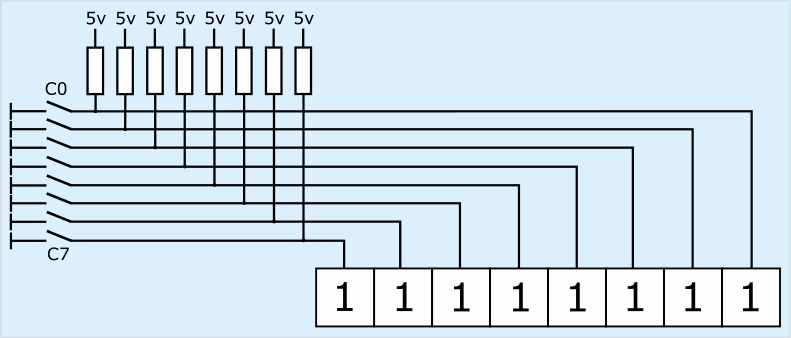
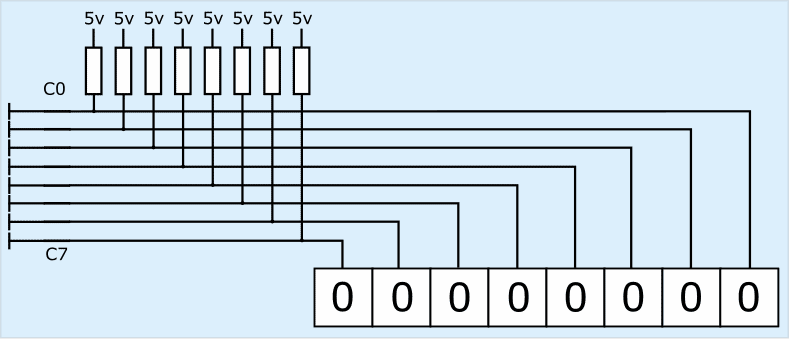
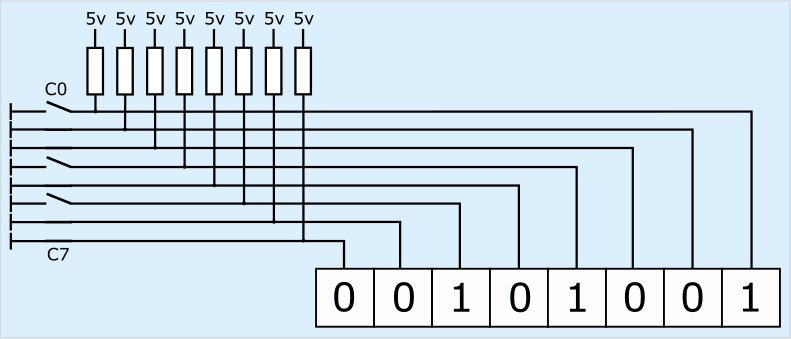
Imaginile de mai jos arată cum se formează un 1 sau un 0 dintr-o poziție a comutatorului. Prin intermediul unui rezistor de tragere tensiunea de 5 volți oferă a logic 1 pe intrarea procesorului când comutatorul este deschis. Tensiunea pe rezistorul de tragere nu este apoi conectată la masă. Când comutatoarele se închid, are loc o cădere de tensiune pe rezistorul de tragere. Tensiunea de 0 volți la intrarea procesorului este văzută ca logic 0.
Toate comutatoarele deschise: 11111111 la intrarea procesorului
Toate comutatoarele închise: 00000000 la intrarea procesorului
O combinație de întrerupătoare deschise și închise produce o serie de unu și zerouri. În figură, mesajul pe 8 biți către procesor este: 00101001.
Cu un procesor pe 8 biți, cei opt biți sunt citiți simultan pe ciclu. În timpul următorului ciclu, care are loc în timpul următorului „tic” al ceasului (vezi magistrala de sistem pe pagina despre funcționarea ECU) urmează o secvență cu opt biți noi.
Comutatoare deschise și închise: 00101001 pe intrarea procesorului
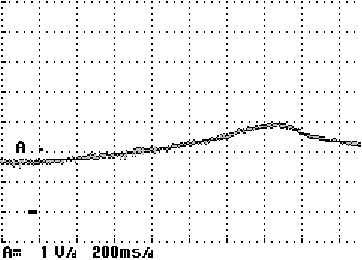
Conversia tensiunilor senzorului analogic în mesaj digital: Semnalele digitale de intrare sunt procesate direct de procesor. Semnalele analogice sunt mai întâi convertite într-un semnal digital în convertorul A/D. Ca exemplu, luăm curba de tensiune analogică a unui senzor de presiune turbo:
la relanti tensiunea este de aproximativ 1,8 volți;
la accelerare, tensiunea crește la aproape 3 volți.
Modificarea tensiunii nu poate fi procesată direct în procesor. În primul rând, tensiunea măsurată trebuie convertită la o valoare zecimală (de la 0 la 255).
Cu un interval de la 0 la 5 volți și o valoare zecimală de la 0 la 255 (deci 256 de posibilități). Un calcul simplu arată că dacă împărțim 5 volți peste 256 de posibilități, se pot face pași de 19,5 mV (0,0195 volți).
Exemplul de mai sus a arătat evoluția tensiunii în funcție de timp a unui senzor de presiune turbo. Curba de tensiune a unui senzor de temperatură și a senzorului de poziție a pedalei de accelerație sunt aceleași, doar într-un interval de timp diferit: încălzirea lichidului de răcire durează mai mult decât smulgerea turbo-ului.
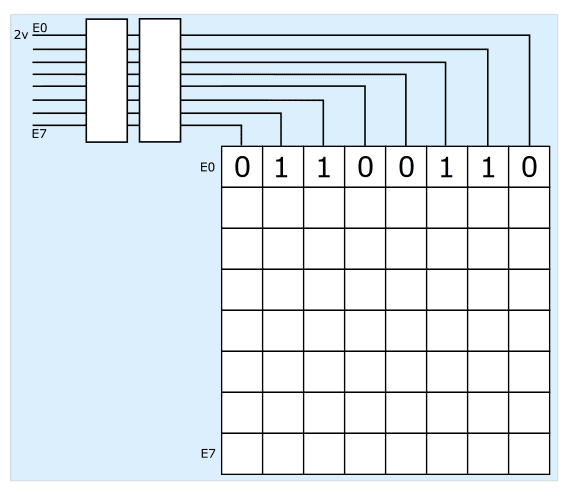
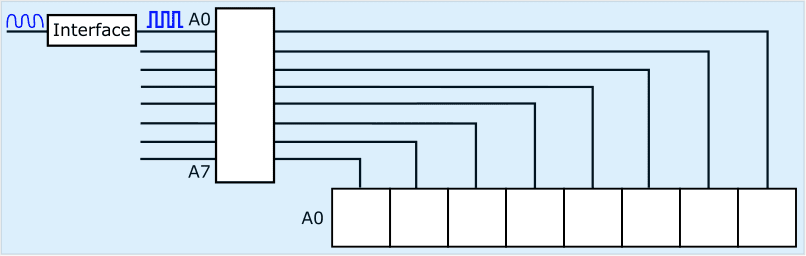
Mai devreme în această secțiune există o imagine care arată o categorie de semnale analogice. Acesta arată, printre altele, senzorul de temperatură și senzorul de poziție a pedalei de accelerație. Tensiunea analogică este convertită într-o unitate de informație de 8 biți în convertorul A/D. Multe procesoare cu mai mulți pini de intrare au un singur convertor A/D. Semnalele analogice multiple sunt combinate într-un singur semnal folosind multiplexarea.
În acest exemplu vedem un convertor A/D cu opt intrări. Există o tensiune de 0 volți pe pinul 2. Pinii E1 la E7 pot fi alimentați cu tensiuni în același timp. Acestea sunt convertite unul câte unul într-un mesaj digital folosind multiplexarea.
Tensiunea de 2 volți este convertită într-o valoare binară. Cu următoarea formulă putem converti tensiunea analogică la o valoare zecimală și apoi o putem converti într-o valoare binară:
2v / 5v * 255d = 102d
Aici împărțim tensiunea de intrare (2v) la tensiunea maximă (5v) și înmulțim aceasta cu valoarea zecimală maximă (255).
Făcând un calcul sau efectuând un truc ordonat, putem converti numărul zecimal de 255d în valoarea binară de 01100110. Vezi pagina pentru asta: binar, zecimal, hexazecimal.
Convertor A/D pe 8 biți
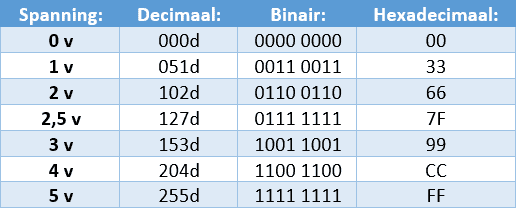
Următorul tabel prezintă valorile zecimale, binare și hexazecimale asociate cu diferite tensiuni.
Când citiți date live, valoarea zecimală, binară sau hexazecimală a semnalului senzorului poate fi afișată.
Un semnal de tensiune <0,5 volți (025d) este considerat un scurtcircuit la masă;
Dacă semnalul crește peste 4,5 volți (220d), computerul traduce acest lucru ca un scurtcircuit cu pozitiv.
Tensiune în valori zecimale, binare și hexazecimale
Conversia semnalelor generatorului de impulsuri într-un mesaj digital: Semnalele de la generatoarele de impulsuri, inclusiv senzorul inductiv de poziție a arborelui cotit, sunt de fapt semnale pornit-oprit care apar după ce dinții roții de impulsuri au trecut de senzor. Tensiunea alternativă a senzorului trebuie mai întâi convertită într-o tensiune cu undă pătrată înainte ca semnalul să fie prezentat procesorului.
În figură vedem o tensiune alternativă sinusoidală pe partea stângă a interfeței. În electronica interfeței, această tensiune alternativă este convertită într-o tensiune cu undă pătrată. Această tensiune de bloc este apoi citită de blocul temporizator/contor: când pulsul este ridicat, contorul începe să conteze și se oprește când pulsul devine din nou ridicat. Numărul de numărări este o măsură a perioadei de timp. frecvența semnalului.
Conversia semnalului generatorului de impulsuri în semnal digital cu blocul temporizator/contor
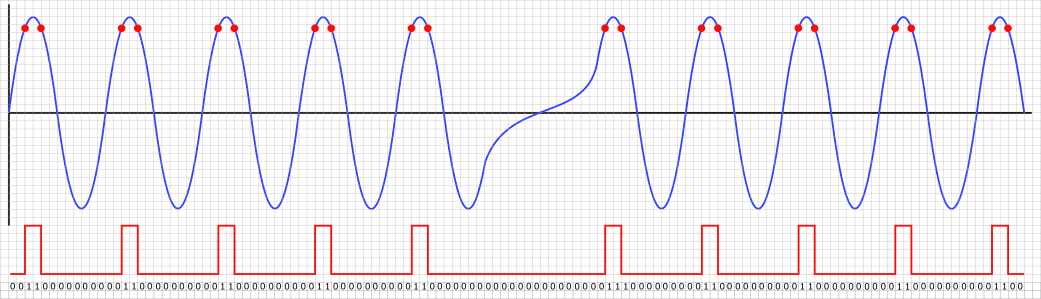
În imaginea de mai jos vedem un semnal de la senzorul inductiv al arborelui cotit cu puncte roșii în flancurile superioare. Punctele roșii sunt setate la o tensiune pentru a crește (logic 1) sau a reduce (logic 0) tensiunea blocului. Explicația continuă sub această imagine.
Tensiune alternativă sinusoidală și un semnal digitizat fără histerezis
Cu toate acestea, tensiunea senzorului nu este niciodată complet pură. Va exista întotdeauna o mică fluctuație a profilului de tensiune. În acest caz, electronica interfeței poate indica incorect acest lucru ca un 0 logic, în timp ce ar trebui să fie de fapt un 1.
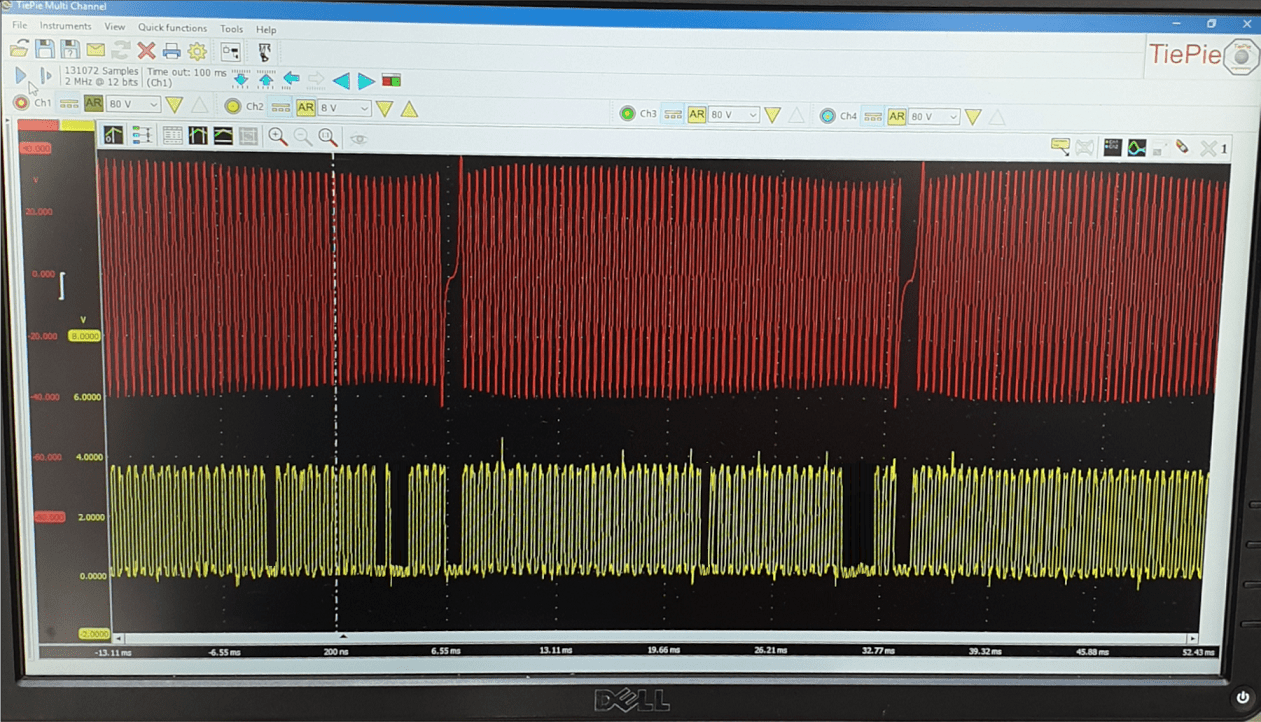
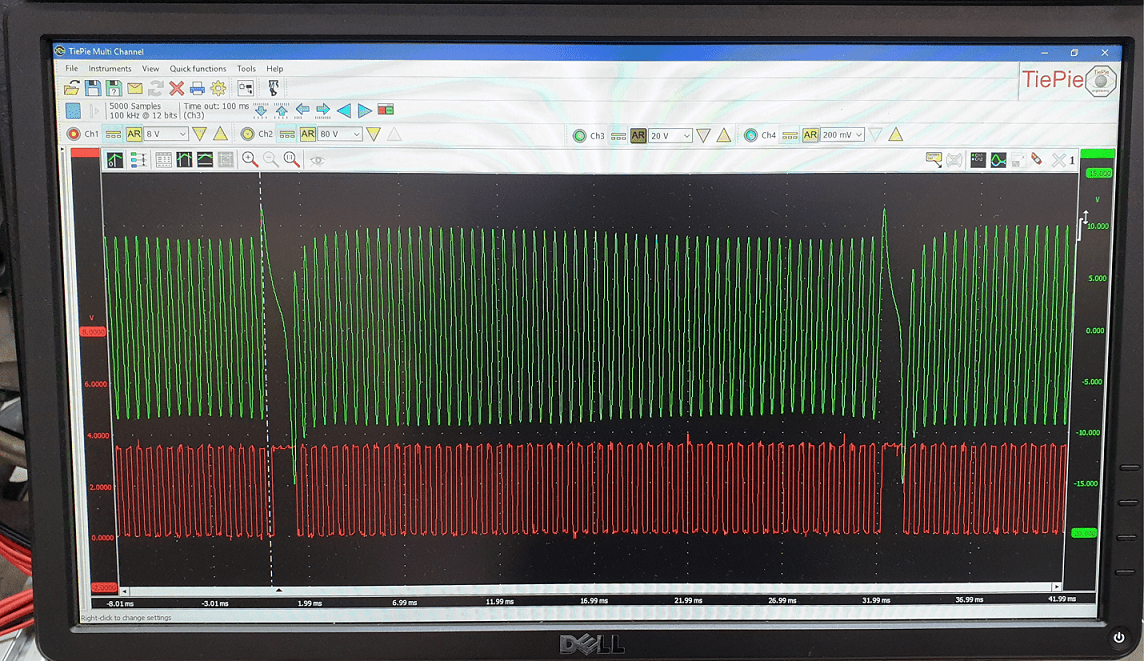
Imaginea de mai jos a fost înregistrată în timpul rulării acesteia Proiectul BMW Megasquirt. Imaginea scopului arată digitalizarea (galben) a semnalului inductiv arborelui cotit (roșu). Imaginea arată clar că lipsesc impulsuri în semnalul blocului galben, în timp ce în acel moment nu trece niciun dinte lipsă în semnalul arborelui cotit.
Semnalul digital necurat conține erori: aceasta este o informație lipsă
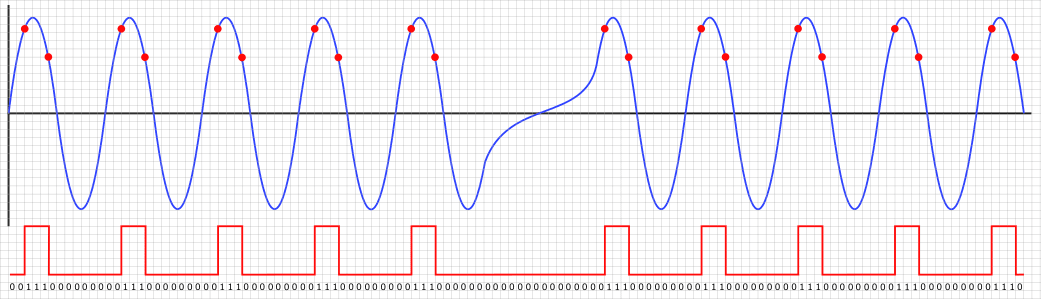
Pentru a se asigura că micile fluctuații ale profilului de tensiune nu provoacă o interpretare incorectă de către ECU, a fost încorporată o așa-numită histerezis. Histerezisul este diferența dintre muchiile de creștere și de descreștere ale profilului de tensiune. În imaginea de mai jos vedem că punctele roșii de pe muchiile în sus sunt la o tensiune mai mare decât punctele roșii de pe muchiile care coboară. Astfel putem fi siguri că micile fluctuații ale semnalului nu afectează conversia digitală.
În primul paragraf în care am început despre conversia semnalului de impuls în semnal digital, s-a menționat deja că frecvența semnalului se determină pe baza timpului dintre două muchii crescătoare ale semnalului pătrat. În aceste exemple se poate deduce clar că histerezisul influențează lățimea semnalului pătrat, dar nu are nicio influență asupra timpului dintre muchiile crescătoare și, prin urmare, nu are nicio influență asupra frecvenței semnalului.
Semnal digitizat generator de impulsuri cu histerezis
Cu o histerezis setata corespunzator, semnalul sinusoidal este convertit corect intr-o tensiune de unda patrata utilizabila, cu doar cele multiple logice in locurile unde trece dintele lipsa.
Vă rugăm să rețineți că în timpul instalării ECU MegaSquirt, setările au fost modificate, inclusiv declanșarea pe liniile în creștere și în scădere. Ca urmare, la trecerea dintelui lipsă în primul exemplu, tensiunea este de 0 volți, iar în imaginea de mai jos tensiunea este de 5 volți.
Semnal generator de impulsuri cu tensiune de undă pătrată curată și corectă
Semnale de ieșire: Semnalele de ieșire constau din impulsuri digitale de pornire/oprire cu un interval de tensiune între 0 și 5 volți (nivel TTL) cu un curent foarte scăzut. Cu toate acestea, actuatoarele necesită control cu niveluri de tensiune și curenți mai mari. Semnalele pornit/oprit pot fi modulate pe lungimea impulsului (PWM), unde lățimea impulsului poate varia la o frecvență constantă.
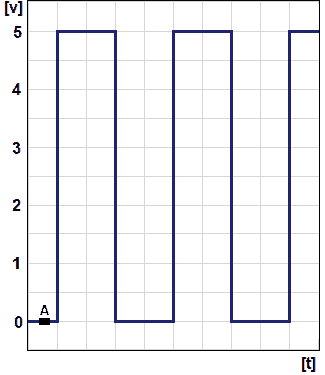
Următoarea figură arată o tensiune de undă pătrată la nivelul TTL în funcție de timp. The ciclu de funcționare din acest semnal PWM este de 50%.
Driverele sunt necesare pentru a controla actuatoarele. Cu semnalul de ieșire digital, curentul necesar poate fi atins cu un driver. În secțiunea următoare vom discuta despre drivere.
Exemplu: semnal PWM
Găsim drivere în fiecare ECU și în unele actuatoare, cum ar fi bobinele de aprindere DIS. Un driver se mai numește și etapă de ieșire sau tranzistor de putere. Driverul face posibilă convertirea semnalelor de ieșire la nivel TTL: 0 până la 5 volți, cu un curent scăzut de 1 mA de la ECU la tensiuni de până la 14 volți și curenți de până la aproximativ 10 A.
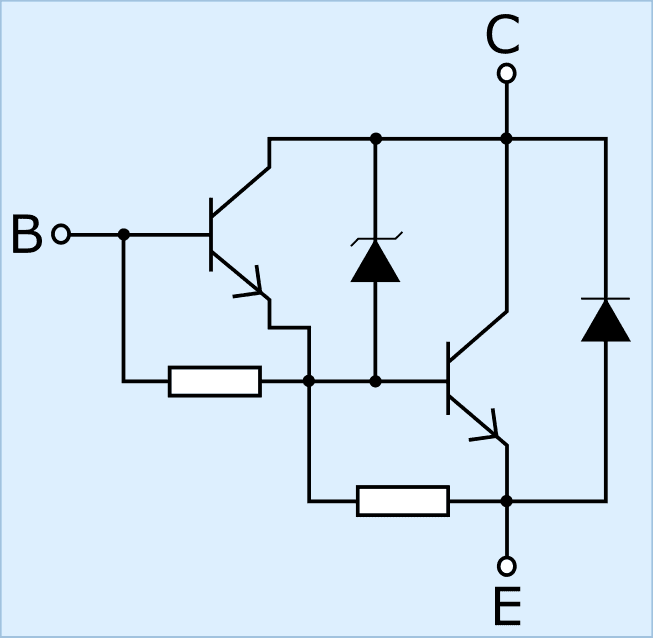
Un șofer poate conecta mai multe tranzistoare conține. Numim un astfel de tranzistor „tranzistor Darlington„. Următoarele imagini arată următoarele circuite:
Schema unui circuit Darlington cu doi tranzistori pentru controlul bobinei de aprindere (sursa: fisa tehnica BU941ZR).
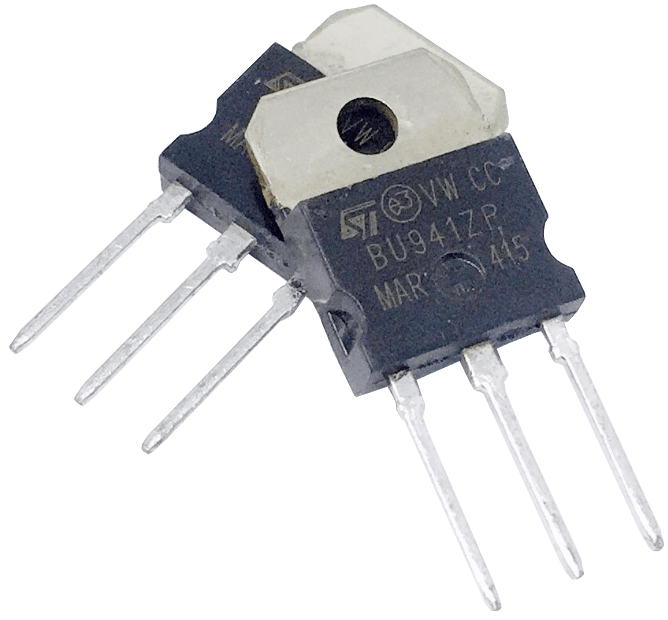
Două tranzistoare, fiecare cu un circuit Darlington (BU941ZR)
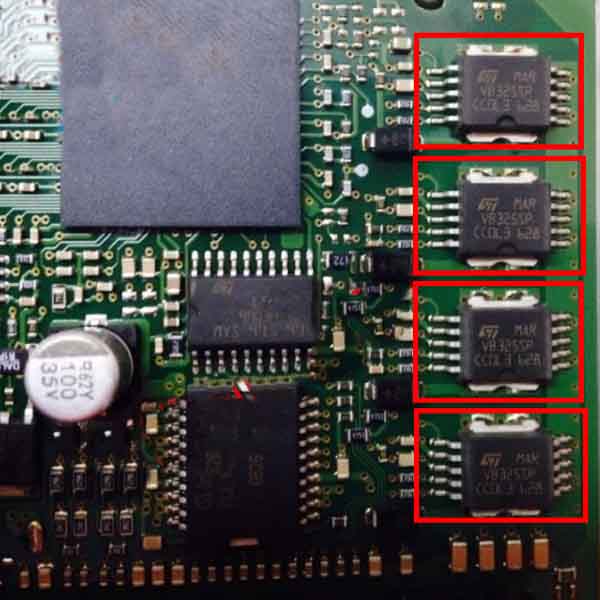
Circuite integrate de driver cu circuite Darlington și electronice suplimentare pentru, printre altele, protecție la temperatură și feedback către microprocesor.
1. Circuitul Darlington
2. Tranzistoare Darlington (2x)
3. CI drivere cu mai multe circuite Darlington
Pe pagina: metode de control ale actuatoarelor controlul actuatoarelor pasive, active și inteligente prin intermediul unui tranzistor (de putere) sau FET este discutat mai detaliat.