Subiecte:
- introducere
- Motor electric AC (sincron, cu magneți permanenți)
- Controlul AC al motorului sincron
- Motor electric de curent alternativ (motor asincron, cușă veveriță)
- Harta eficienței motorului electric sincron și asincron
Introducere:
Un motor electric este folosit pentru a conduce un vehicul hibrid sau complet electric. Motorul electric convertește energia electrică (de la baterie sau de la extinderea autonomiei) în mișcare pentru a conduce roțile. În plus, motorul electric poate transforma și energia cinetică în energie electrică la frânarea motorului: frânare regenerativă. În acest caz, motorul electric funcționează ca un dinam. Datorită acestor două funcții, numim și motorul electric „mașină electrică”.
Opțiunile de amplasare a motorului electric într-un vehicul hibrid sunt:
- Pe motorul cu ardere, unde transmisia se realizează prin intermediul unei curele multiple sau direct prin arborele cotit;
- Între motor și cutie de viteze: arborele de intrare al cutiei de viteze este antrenat de motorul electric;
- Integrat in cutia de viteze;
- Pe diferenţial;
- La butucii roților (motorul butucului).
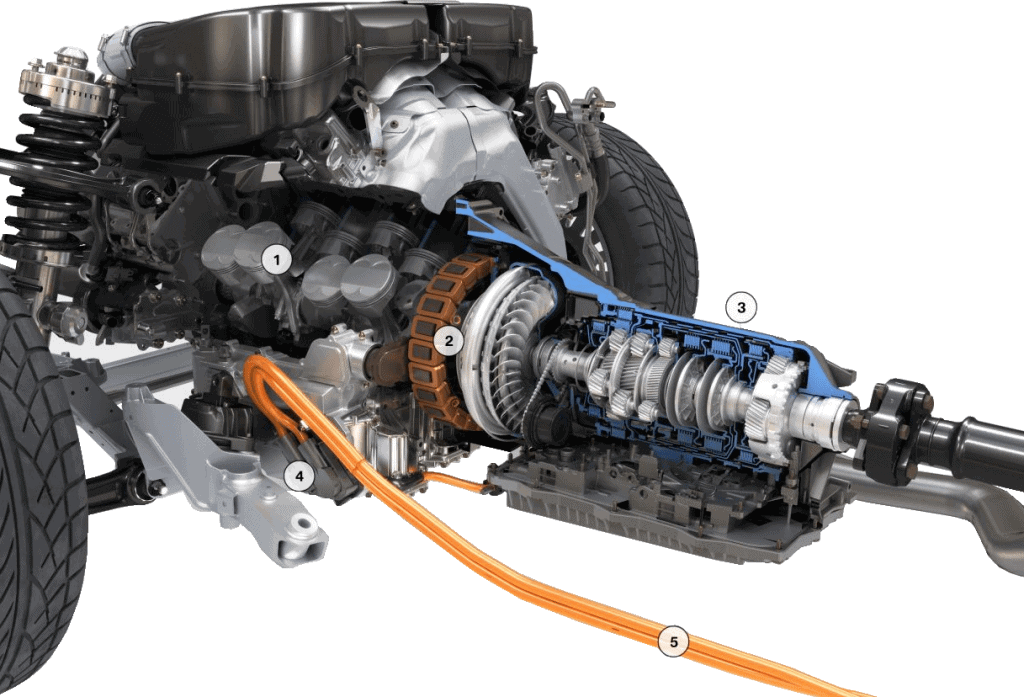
Motorul electric al unei mașini complet electrice este adesea montat pe puntea din spate. Imaginea de mai jos prezintă motorul electric cu invertorul într-o carcasă cilindrică și unitatea finală a unui Tesla.

Motor electric AC (sincron, cu magneți permanenți):
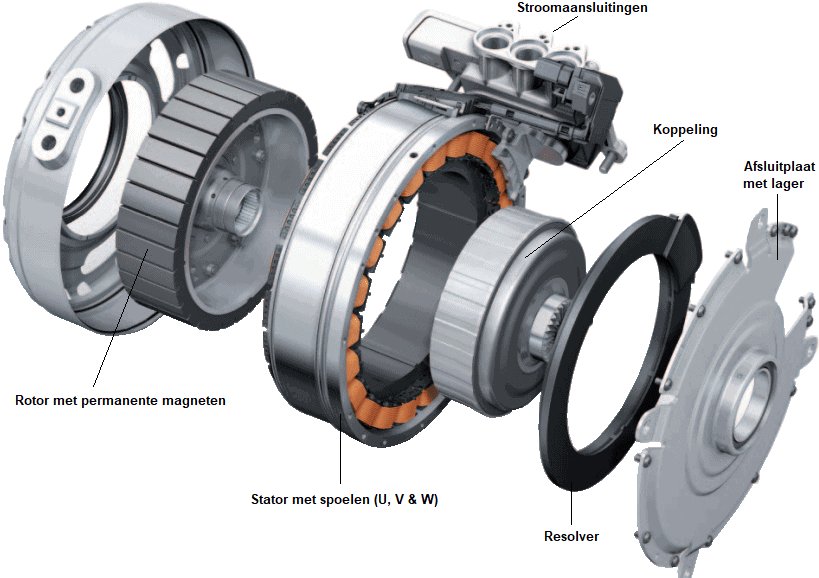
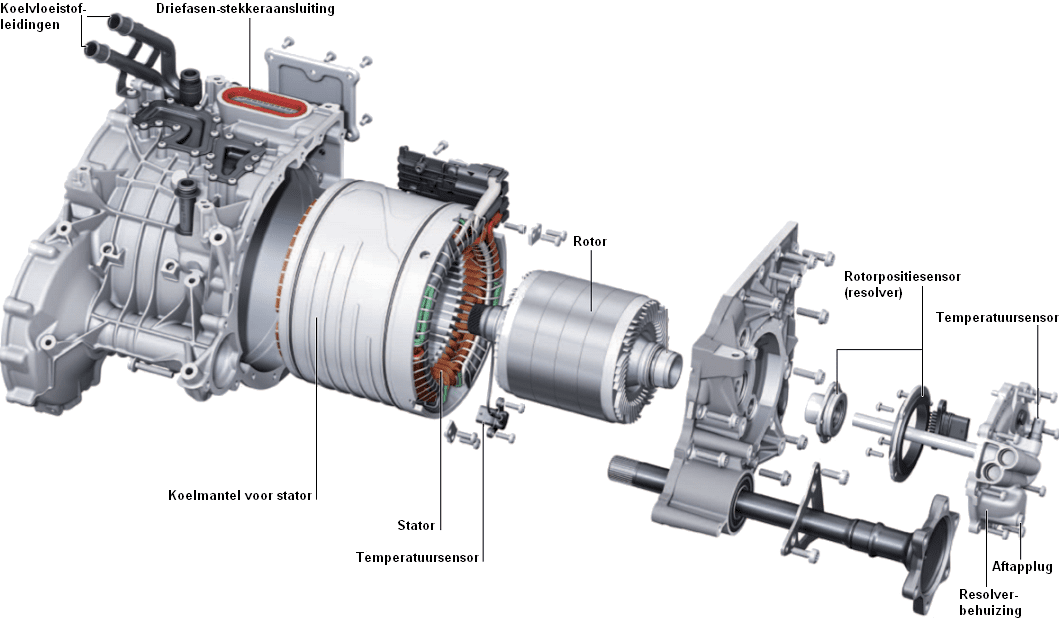
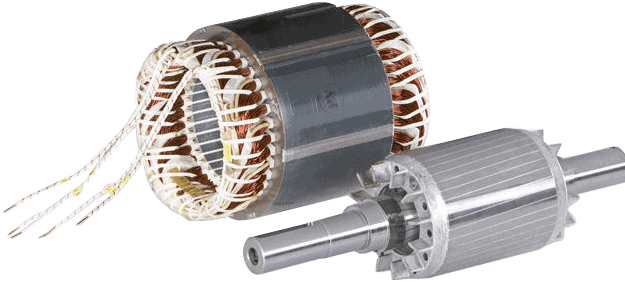
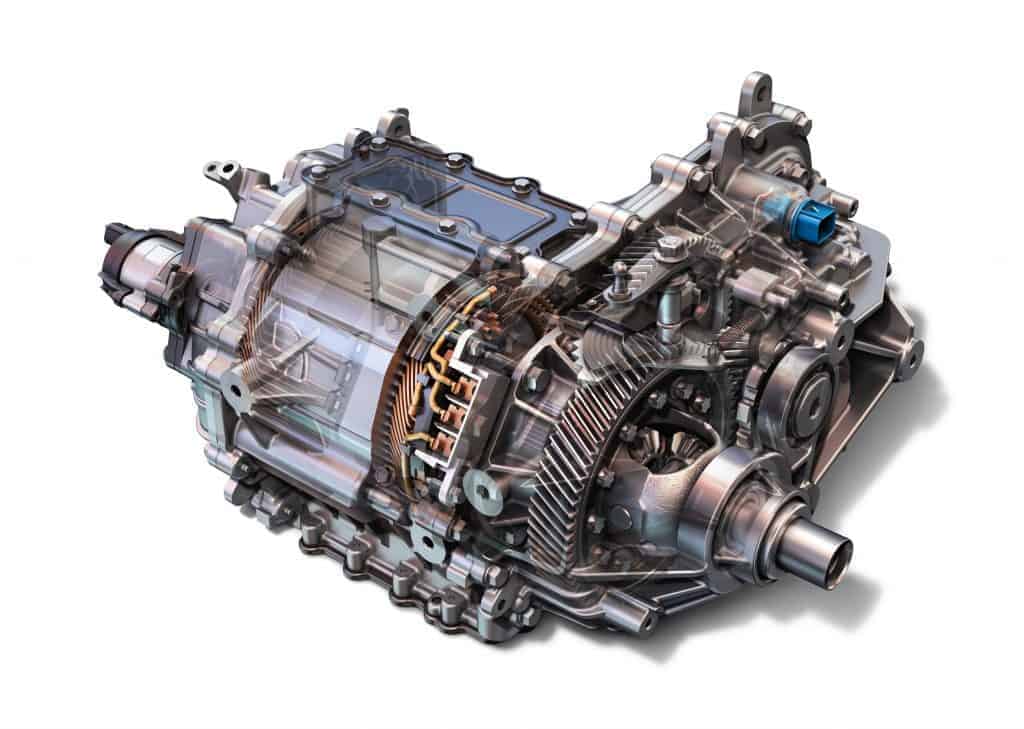
Următoarea imagine prezintă părțile unui motor electric Audi (sincron). Acest tip este utilizat în variantele hibride ale A6 și A8. Vom enumera pe scurt componentele. Aceste componente sunt descrise în detaliu în paragrafele următoare.
Rotorul cu magneți permanenți va începe să se rotească ca urmare a unei modificări a câmpului magnetic din stator. Rotorul este conectat la ambreiaj, care poate conecta sau deconecta motorul cu ardere și motorul electric (împreună cu un ambreiaj (nu este prezentat)) în diferite condiții de funcționare. Poziția rotorului este determinată de rezolvator măsurat: aceste date sunt importante pentru driverele IGBT pentru a controla bobinele statorului la momentul potrivit.
Motorul electric cu magneți permanenți poate fi controlat atât de DC (tensiune continuă) cât și de AC (tensiune alternativă).
Motorul sincron este unul dintre cele mai frecvent utilizate motoare electrice în vehiculele hibride sau complet electrice. Acest tip de motor electric este format dintr-un stator cu înfășurări și un rotor cu mai mulți magneți permanenți. Rotorul se rotește cu aceeași viteză ca și câmpul magnetic al statorului. Motorul sincron poate fi controlat după cum urmează:
- AC: controlat de un semnal sinusoidal (curent alternativ).
- DC: controlat cu un semnal pătrat sau trapezoidal (curent continuu)
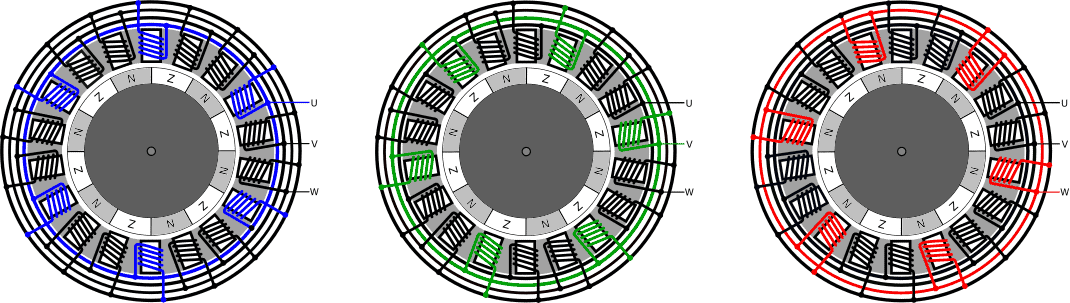
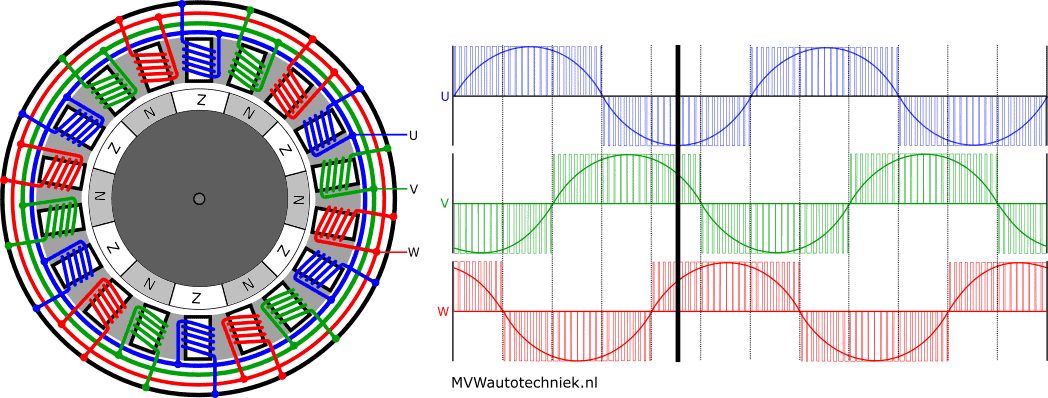
Statorul motorului sincron este alcătuit din trei grupuri de bobine statorice: U, V și W. Fiecare grup conține trei seturi de șase bobine conectate în paralel care sunt distribuite pe întreaga circumferință a statorului. Fiecare a treia bobină aparține aceleiași serii.
- Bobine U: albastre
- Bobine V: verde
- W bobine: roșu
Rotorul conține mai mulți magneți permanenți. Prin energizarea alternativă a bobinelor din stator, se creează un câmp magnetic rotativ. Rotorul urmează câmpul rotativ și, prin urmare, se rotește.
Controlul AC al motorului sincron:
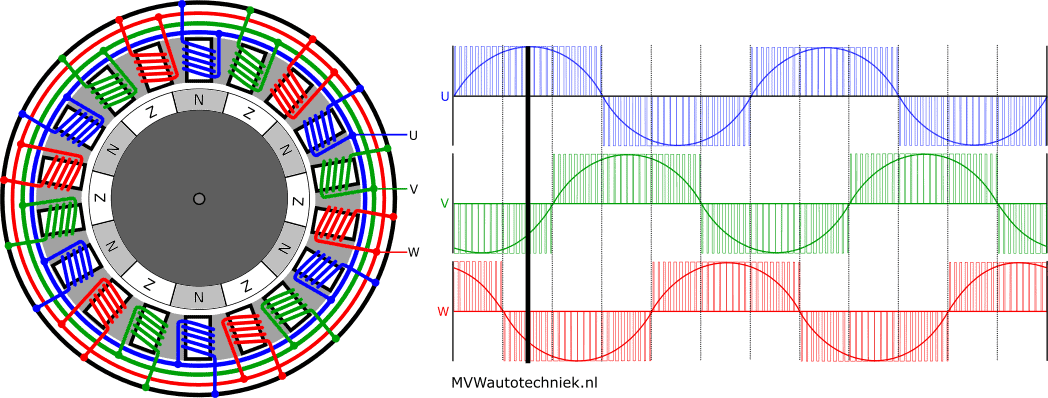
Controlul AC utilizează controlul controlat în frecvență sau comutația sinusoidală. Bobinele statorului sunt alimentate cu o tensiune de undă sinusoidală trifazată alternativă pentru a roti rotorul.
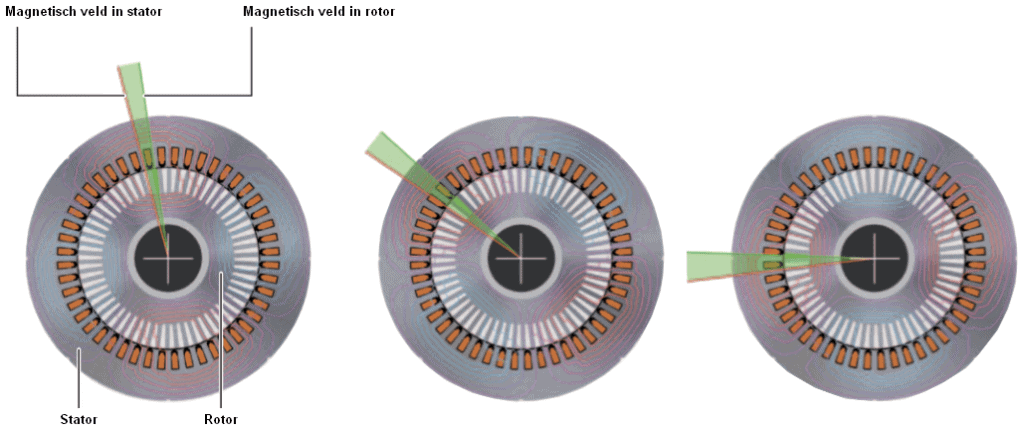
Imaginea de mai jos arată poziția rotorului cu o bobină U excitată maxim. Ca rezultat al câmpului magnetic, polii nordici s-au poziționat direct opus bobinelor U energizate. Cursorul din grafic de lângă motorul electric indică controlul bobinelor în acel moment.
Pentru informarea dvs.: rotorul din explicație se rotește la controlul bobinelor statorului în sensul acelor de ceasornic.
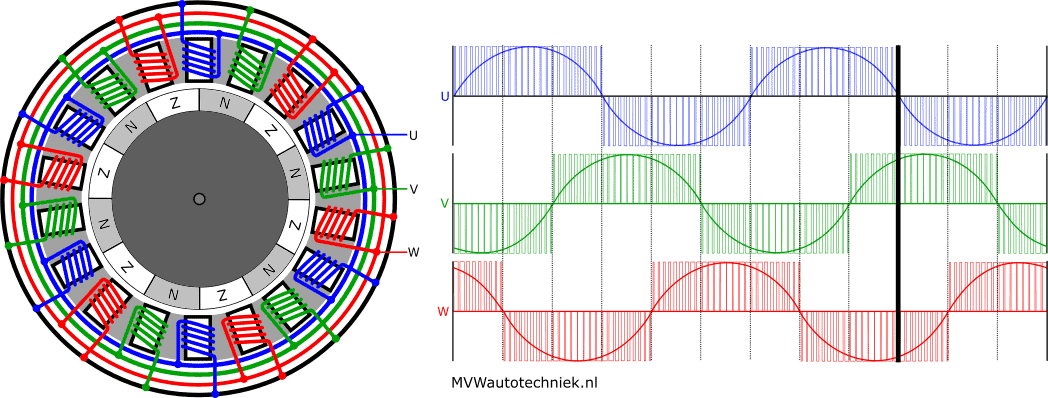
În imaginea următoare, unda sinusoidală, adică curentul alternativ prin bobina U, este maxim negativă. În timpul acestui control, polii sudici ai rotorului sunt direct opuși bobinelor statorului (U) sub tensiune.
Există de fapt un mic spațiu de aer între polii nord și sud ai rotorului. În timpul schimbării de la polul sud la polul nord, direcția curentului în bobina U se schimbă. Mai departe:
- Curentul prin bobina V (verde) este aproape maxim pozitiv; polul nord este, de asemenea, aproape opus bobinei.
- Curentul prin bobina W a fost maxim negativ și este în creștere. Polul sud s-a rotit dincolo de bobină.
Pentru a da o impresie despre cum curge curentul, animația de mai jos arată rotația rotorului din cauza curentului alternativ.
Motor electric de curent alternativ (motor asincron, cu colivie):
Motorul electric cu cușcă de veveriță sau cu armătură în scurtcircuit este un motor asincron. Diferența dintre motorul sincron cu magneți permanenți și motorul asincron este în rotor: acesta este un tambur de fier moale cu conductori pe direcția longitudinală. Rotorul funcționează asincron cu statorul, ceea ce înseamnă că există o diferență de viteză între rotor și viteza magnetică a statorului. Statorul este exact la fel.
Rotorul motorului electric asincron este format din bobine scurtcircuitate; bobinele U, V și W sunt conectate între ele pe o parte. Când rotorul se află în câmpul rotativ al statorului, se creează o tensiune de inducție în bobinele rotorului. Deoarece bobinele rotorului sunt scurtcircuitate între ele, un curent curge prin ele. Acest curent face ca rotorul să genereze un câmp magnetic, creând un cuplu. Deoarece funcționarea motorului electric asincron se bazează pe legea inducției, îl numim și motor cu inducție.
Cuplul furnizat afectează alunecarea dintre câmpul magnetic rotativ din stator și viteza rotorului.
Motorul asincron are o serie de avantaje și dezavantaje în comparație cu motorul sincron.
Beneficii:
- rotor relativ simplu, robust și ieftin;
- cuplu mare la viteză mică.
contra:
- densitate mai mică de putere (pe masă) și eficiență (eficiență). Curenții din bobinele rotorului în scurtcircuit dau naștere la pierderi suplimentare ale rotorului;
- viteza nu poate fi controlată cu precizie deoarece depinde de sarcină. În sine, acest lucru nu trebuie să fie un dezavantaj: cu un sistem de control bun se poate regla și viteza motorului asincron;
- curent de pornire mare.
Poziția rotorului și viteza motorului asincron sunt măsurate de a senzor de poziție a rotorului. Senzorii Hall furnizează adesea cel puțin patru impulsuri pe rotație a rotorului pentru a transmite poziția și viteza rotorului. Nu numim acest tip de senzor de poziție a rotorului un resolver, așa cum este cazul motorului sincron.
Spre deosebire de motorul sincron, senzorul de poziție a rotorului nu este necesar pentru a cunoaște poziția rotorului la oprire. Poziția rotorului este importantă în timpul rotației: trebuie avut grijă ca alunecarea dintre câmpul magnetic rotativ și rotor să nu devină prea mare. Când câmpul rotativ se mișcă prea repede, poate apărea o situație în care rotorul dorește brusc să se rotească în cealaltă direcție. Forțele care apar pot fi dezastruoase pentru componentele mecanice și electrice.
Unii producători aleg, de asemenea, să folosească un motor asincron rezolvator punerea în aplicare. Motivul îmi este necunoscut. În orice caz, rezolutorul este extrem de precis atât când stați nemișcat, cât și când rulați, ceea ce poate beneficia de controlul precis.
Harta eficienței motorului electric sincron și asincron:
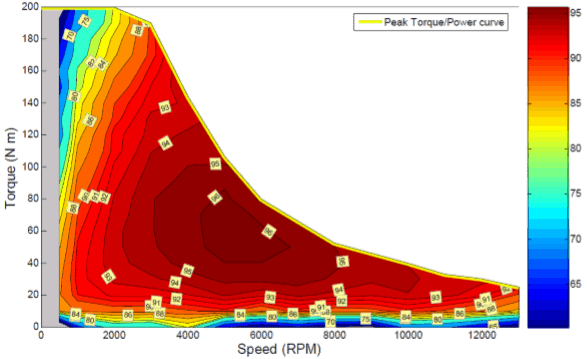
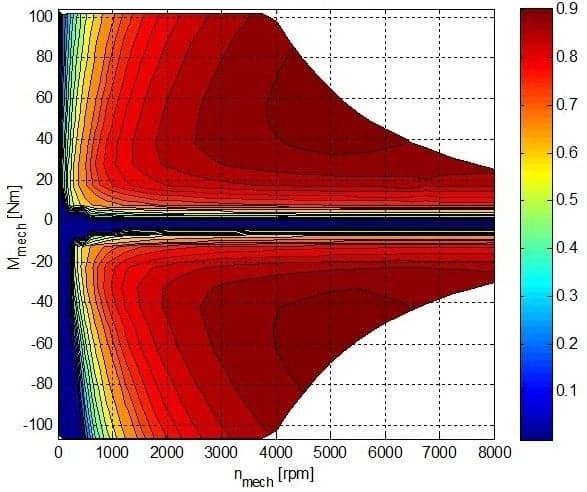
Imaginile de mai jos arată eficiența motorului electric sincron (stânga) și a motorului electric asincron (dreapta).
- Motorul electric sincron este foarte eficient. Eficiența este peste 90% într-o zonă mare, cu valori de vârf de până la 96%. De la 2000 rpm, are loc slăbirea câmpului, determinând scăderea cuplului maxim.
- Motorul asincron are o eficiență semnificativ mai mică decât motorul sincron la viteze mai mici.
Pagini înrudite:
- Acționare electrică (Prezentare generală)
- Motor electric DC
- Invertor
- Senzor de poziție a rotorului (resolver)