Subiecte:
- general ESP
- Alte nume pentru ESP
- Subvirare
- Supărat
- Senzor unghi de virare
- Senzor de accelerație transversală (senzor G)
- Senzor de moment de rotire (senzor de rotire)
- Senzor presiune frână
general ESP:
ESP este o abreviere a programului electronic de stabilitate și funcționează în combinație cu ABS și ASR. În cazul în care vehiculul este echipat cu ABS (Sistem antiblocare frânare) și ASR/ASC (Reglare/Control anti-alunecare), sistemul ESP poate fi adăugat cu ajutorul unui număr de senzori suplimentari și o reglare software. Componentele precum senzorii de turație a roților și pompa ABS / unitatea de control sunt, de asemenea, utilizate pentru sistemul ESP. Sistemul ESP reglează și reducerea puterii motorului; închizând mai mult accelerația sau decupând contactul.
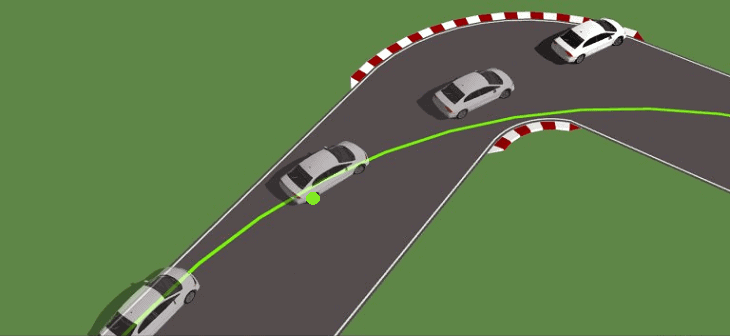
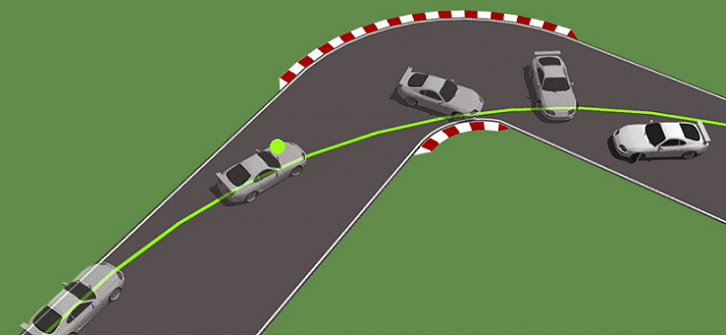
Scopul sistemului ESP este de a îmbunătăți comportamentul în viraje (subvirare și supravirare). Acest lucru se aplică, printre altele, situațiilor în care se face o frânare într-un viraj sau când are loc o manevră de evaziune. Sistemul ESP frânează o roată a vehiculului, astfel încât caracteristicile normale de direcție sunt restabilite. Mai jos sunt cele 2 situatii in care roata indicata cu verde este franata. Prin frânare, vehiculul va urma linia verde, în loc să scape de sub control. Diverse componente ESP necesare sunt descrise în partea de jos a acestei pagini.
Alte nume pentru ESP:
Producătorii de mașini folosesc adesea propriile nume pentru ESP pentru modelele lor, chiar dacă funcționarea este aceeași. Aceste alte nume sunt date pentru a face sistemul să pară „mai luxos” decât ESP standard. Exemple în acest sens sunt:
- ASC + T: Control automat al stabilității și al tracțiunii (vechea generație BMW de înainte de 1996)
- DSC: Program de stabilitate dinamică: BMW, Jaguar, Land Rover, Mazda, Mini
- DSTC: Control dinamic al stabilității și al tracțiunii (Volvo)
- ESP: Program electronic de stabilitate (Alfa Romeo, Audi, Cadillac, Chevrolet, Chrysler, Citroen, Fiat, Ford, Hyundai, Jeep, Kia, Mercedes, Mitsubishi, Nissan, Opel, Peugeot, Renault, Saab, Seat, Skoda, Smart, Suzuki , Volkswagen
- PSM: Porsche Stability Management (Porsche)
- VDC: Control dinamic al vehiculului (Alfa Romeo)
- VDCS: Sistemul de control dinamic al vehiculului (Subaru)
- VSC: Controlul stabilității vehiculului (Lexus, Toyota)
- VSA: Asistență pentru stabilitatea vehiculului (Honda)
Subvirare:
Subvirarea apare atunci când anvelopele din față nu mai au suficientă aderență pe suprafața drumului. Mașina va face un viraj mai ușor decât s-a prevăzut, așa că va avea o tendință mai mare de a merge drept. Prin urmare, roțile din față vor aluneca spre exteriorul curbei. Subvirarea poate fi eliminată pentru a se asigura că roțile din față au din nou o aderență suficientă pe suprafața drumului. Pentru a realiza acest lucru, puteți folosi mai puțină benzină sau puteți vira mai puțin. Chiar și mai multă direcție nu va ajuta împotriva subvirării, poate chiar să agraveze situația, deoarece roțile vor avea doar mai puțină aderență. Majoritatea producătorilor de automobile ajustează șasiul în așa fel încât mașina să aibă tendința de a subvirează mai degrabă decât de supravirare. Motivul este că șoferul obișnuit eliberează imediat gazul într-o astfel de situație (care poate fi soluția care dă din nou aderență mașinii).
Supărat:
Supravirarea are loc atunci când anvelopele din spate nu mai prinde suprafața drumului. Anvelopele din spate ale mașinii vor aluneca spre exteriorul curbei. Spatele dorește apoi să depășească partea din față, determinând vehiculul să se rotească pe axa sa. Supravirarea poate fi corectată prin contravirare și încetinire pentru mașinile cu tracțiune spate (de exemplu, BMW) și puțin mai multă benzină pentru mașinile cu tracțiune față (de exemplu, Volkswagen). Adesea, mai ales în sporturile cu motor, se folosește în mod conștient supravirarea pentru a conduce printr-o combinație de viraj mai ușor și mai rapid. Într-un caz extrem, această formă de supărare se numește „derivare”. Supravirarea este, în general, mai periculoasă decât subvirarea, deoarece majoritatea șoferilor sunt mai puțin probabil să o remedieze. De aceea, la proiectarea mașinii, șasiul este reglat mai mult spre „subvirare”, deoarece este mai ușor de corectat.
Senzor unghi de virare:
Senzorul unghiului de virare este montat pe coloana de direcție. Acesta poate fi lângă cremaliera de direcție, dar și în interior, între pârghiile de semnalizare / ștergătoare, așa cum se arată în imaginea din dreapta. Acestea sunt comutatoarele coloanei de direcție de la un BMW.
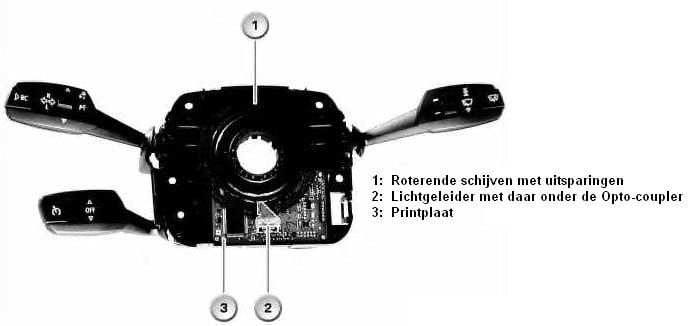
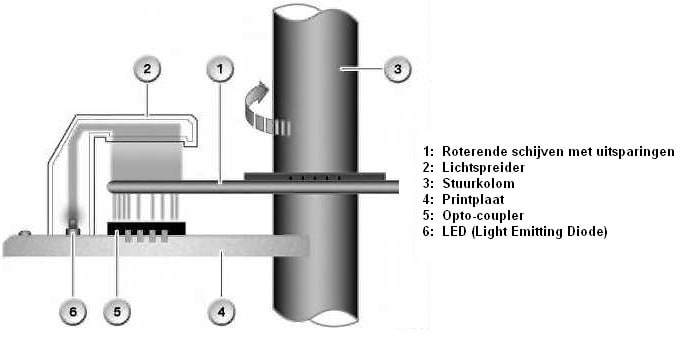
Sarcina senzorului unghiului de direcție este de a măsura unghiul de rotație al volanului. Acest senzor folosește unul sau mai multe optocuple care măsoară transmisia luminii a discurilor rotative. Golurile de lumină sunt diferite în fiecare locație pe un disc rotativ, permițând recunoașterea exactă a poziției volanului. Toate adânciturile discurilor creează un semnal pătrat asimetric. Optocuplerul poate converti un semnal luminos într-o tensiune care este apoi transmisă unității de control.
Senzor de accelerație transversală (senzor G):
Senzorul de accelerație laterală (numit și senzorul G al forțelor G) este plasat cât mai mult posibil în centrul mașinii. La viraj, placa mobilă (vezi imaginea de mai jos, numărul 2) se deplasează între condensatori (1). Condensatorii au o tensiune de 5 volți. Când placa este în mijloc (adică când mașina merge drept), tensiunea de pe ambii condensatori este de 2,5 volți. Când mașina face o întoarcere (în cazul imaginii din stânga), placa se deplasează într-o parte din cauza forței centrifuge și a forței centripete.
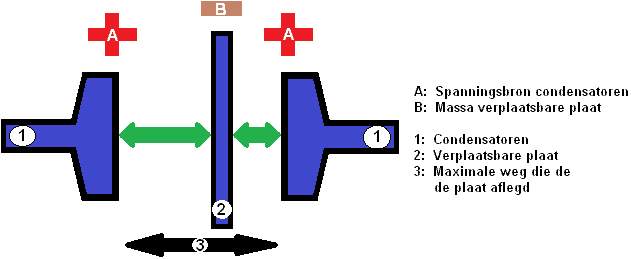
Când placa se deplasează, capacitatea condensatorului din dreapta scade. Acesta nu va fi acum 2,5 volți, ci, de exemplu, 1,5 V. Unitatea de control ESP recunoaște diferența dintre cei doi condensatori și poate determina din aceasta cât de mare este forța centrifugă sau forța centripetă (adică cât de ascuțită este făcută curba. În acest fel se poate determina dacă mașina este supravirată, de exemplu) . Valorile acestui senzor de accelerație laterală sunt folosite pentru a compara datele de la senzorii de viteză a roților și pentru a determina dacă sistemul ESP ar trebui să intervină.
Senzor de moment de rotire (senzor de rotire):
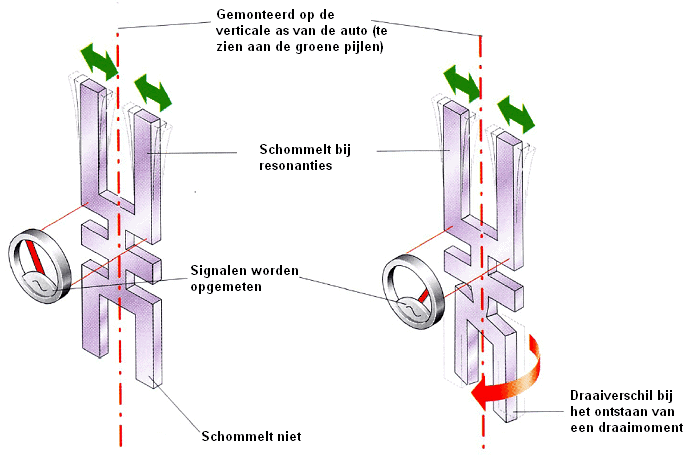
Senzorul de moment de rotație, numit și „senzor de rotire” în engleză, este plasat cât mai mult posibil în centrul mașinii împreună cu senzorul de accelerație laterală. Senzorul furnizează datele de care sistemul ESP are nevoie. Senzorul de moment de rotire înregistrează tendința vehiculului de a se roti în jurul axei verticale. Valoarea acestei măsurători se numește viteza de rotație și este afișată în grade pe secundă.
Senzorul este format din două diapazon. Diapasonul de sus este făcut să vibreze (rezonanță) la 11000 Hz (11kHz) cu o tensiune alternativă și se rotește atunci când vehiculul trece printr-o curbă. Cu cât îndoirea este mai ascuțită, cu atât diapazonul inferior este răsucit în raport cu furca superioară. Principiul se bazează pe forțele giroscopice (forța Coriolis). Când piesa rotativă este mutată din poziție cu torsiune, se creează forțe giroscopice. De aici și numele senzor de moment de rotire.
Datorită torsiunii, un element piezo generează o diferență de tensiune care este măsurată de dispozitivul de control. Tensiunea generată variază între 0 și 5 volți. În poziție de repaus (când nu este înregistrată nicio rotație) senzorul emite 2,5 volți.
Senzor presiune frana:
La sistemul de frânare au fost adăugați și senzori de presiune hidraulică separați (în ambele circuite), ceea ce poate fi văzut în imaginile de mai jos. La mașinile mai vechi, acești senzori sunt amplasați în conductele de frână. În zilele noastre, senzorii de presiune de frânare sunt de obicei încorporați în unitatea hidraulică a sistemului ABS în sine. Această unitate este adesea vizibilă sub capotă. Toate conductele de frână hidraulice sunt conectate la aceasta.

