Tópicos:
- Introdução
- Barramento do sistema
- Processador (CPU)
- memoria RAM
- Memória ROM
Introdução:
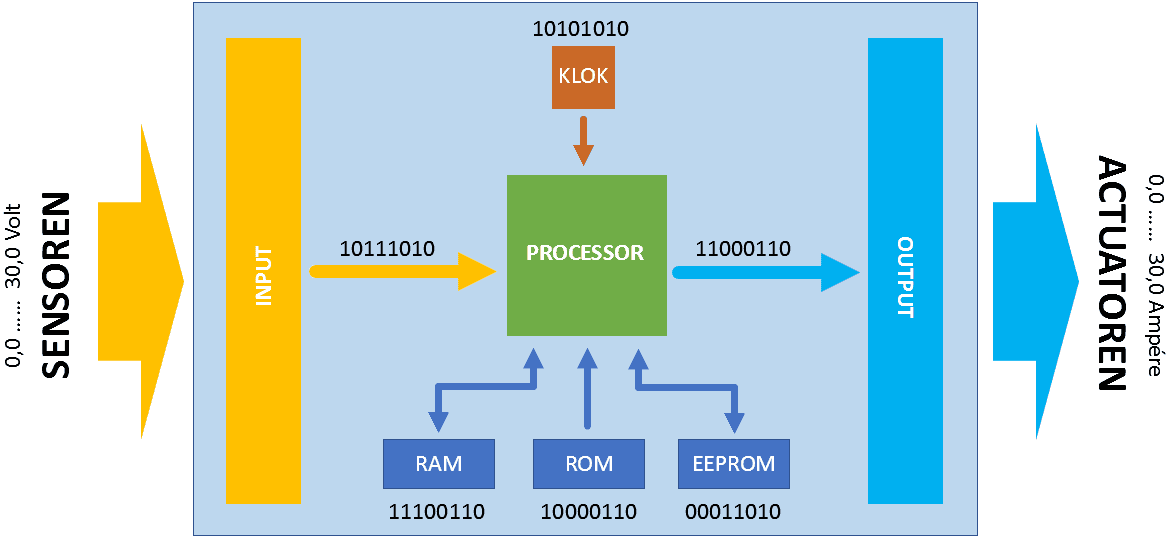
Uma ECU recebe ou dados de medição dos sensores, processa as informações e realiza cálculos para controlar os atuadores. A figura abaixo mostra um diagrama de blocos de um sistema de controle.
Sensores são sensores que respondem a uma quantidade física. A eletrônica do sensor converte isso em um sinal elétrico. A ECU recebe este sinal elétrico como “entrada” e compara este sinal com o valor pré-programado. Dependendo da finalidade do sinal, o controle ocorre ajustando o controle do atuador de acordo.
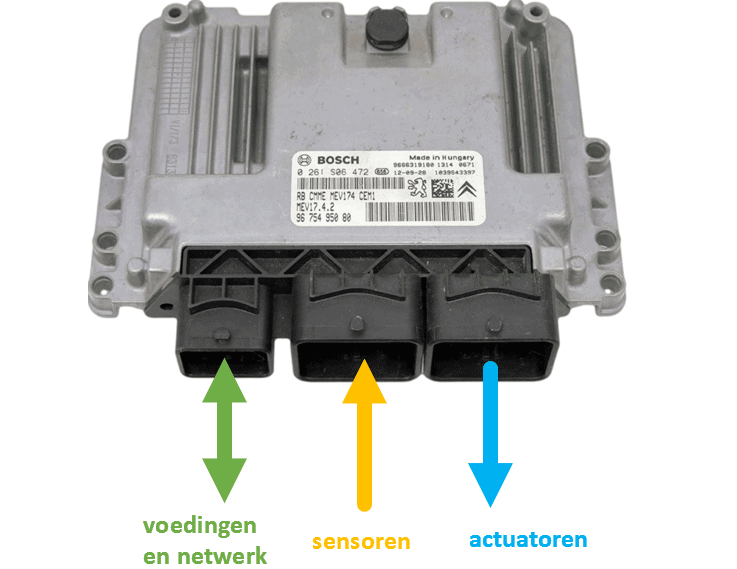
A figura a seguir mostra uma ECU com três conexões de encaixe. Da esquerda para a direita: fonte e rede de alimentação, sensores, atuadores.
Num sistema de gestão de motor a gasolina encontramos, entre outros, os seguintes sensores:
- sensor de posição do virabrequim para medir a velocidade do virabrequim;
- sensor de temperatura do líquido refrigerante para medir o aquecimento do líquido refrigerante;
- sensores de posição do acelerador para medir a posição da válvula borboleta e, portanto, a carga do motor;
- MAP ou medidor de massa de ar para medir a pressão negativa ou fluxo de ar;
- sensor lambda para medir o teor de oxigênio nos gases de exaustão;
- o sensor barométrico e os sensores de temperatura do ar de admissão;
- sensor de detonação para avançar a ignição o máximo possível.
Os sensores acima servem como entrada para controlar os injetores e bobina(s) de ignição. Para isso, todos os valores dos sensores são procurados em um campo característico pré-programado.
Tomamos o controle do injetor como exemplo. Em marcha lenta do motor, os injetores injetam um número x de graus após o PMS.
- Em baixa temperatura do líquido refrigerante, o tempo de injeção é prolongado (enriquecimento);
- Ao acelerar suavemente, o tempo de injeção também é prolongado. Também é realizada uma medição que monitora a rapidez com que o pedal do acelerador é pressionado: quando a aceleração é acelerada abruptamente, ocorre um enriquecimento adicional;
- A pressão negativa no coletor de admissão influencia o momento e a duração da injeção;
- O sensor lambda (por exemplo, o sensor de salto) mede se a mistura é muito rica ou muito pobre. Se a mistura for muito pobre para algumas rotações do virabrequim, o tempo de injeção é estendido usando os trims de combustível até que a mistura fique novamente estequiométrica;
- O sensor barométrico e o sensor de temperatura do ar de admissão medem a pressão e a temperatura do ar para determinar o nível de oxigênio no ar aspirado.
A duração da injeção depende, portanto, dos valores de até cinco sensores. Nos motores modernos, ainda mais sensores desempenham um papel nisso.
Durante e após controlar um atuador, os sensores enviam informações para a ECU. O valor medido é comparado com o valor desejado no software. Isso pode ser usado para determinar se um controle do atuador pode permanecer constante, se deve ser reduzido ou estendido. A ECU atua, portanto, como um controlador, criando um circuito de controle.
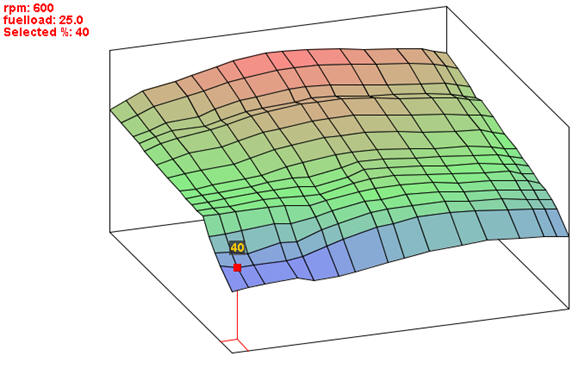
A figura a seguir mostra um diagrama no qual o tempo básico de injeção é determinado a partir da velocidade do virabrequim em comparação com a subpressão no coletor de admissão, que é uma medida da carga do motor. As temperaturas e o sensor lambda formam um fator de correção e cada um possui seu próprio campo característico.
Barramento do sistema:
O barramento do sistema faz conexões entre os componentes da ECU (veja a imagem abaixo). No topo da ECU encontramos o relógio. Este chamado oscilador produz uma tensão de onda quadrada com uma frequência geralmente de 16 MHz. A frequência do clock determina a velocidade da unidade de controle. Os componentes de uma malha de controle são coordenados por este temporizador.
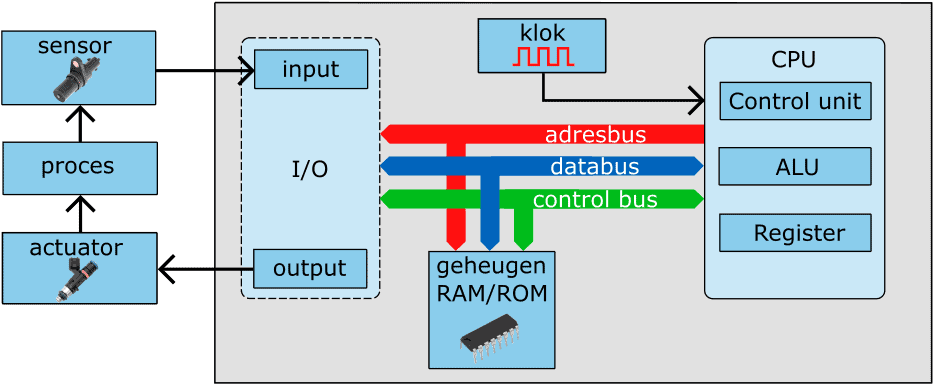
A CPU, a memória e a interface de E/S (I/O significa: entrada/saída) são interligadas por um barramento de sistema, composto por múltiplas conexões na placa de circuito impresso. Podemos dividi-los em:
- barramento de endereços: este barramento garante a transferência de dados do microprocessador para determinados locais de memória;
- barramento de dados: os dados entre a memória, a CPU e as interfaces são transportados através do barramento de dados;
- barramento de controle: serve como um controlador, fazendo seleções de leitura e gravação, solicitações e redefinições com base no tempo do relógio do sistema.
Processador (CPU):
O processador (Unidade Central de Processamento) é o coração do computador. Os circuitos combinacionais, que consistem em um enorme número de portas AND, OR e NOT, são construídos na ECU por meio de software. Várias instruções (o software) são incorporadas durante a fabricação do processador. Estas instruções executam ações e as colocam na ordem correta. Exemplo:
- as letras do alfabeto são armazenadas digitalmente no processador. Na realidade, não serão cartas, mas instruções digitais que representam ações simples;
- colocando as letras na ordem certa podemos formar palavras;
- colocando as palavras na ordem correta podemos formar frases;
- as frases compõem a história: na realidade, o programa de computador.
O programa para colocar as instruções conhecidas pelo processador na ordem correta foi incorporado ao software pelo programador. Este programa é carregado na memória flash da ECU.
Quando a ECU é iniciada, as instruções são recuperadas da memória flash e executadas uma a uma pelo processador, de acordo com o relógio. Após a execução e o término do programa, o ciclo recomeça.
Os dados necessários para carregar dados como os tempos de ignição são carregados da memória ROM. O processador inicializa a partir da memória ROM e copia os dados da ROM para a RAM. Após a inicialização, a CPU recupera todos os dados e comandos da rápida memória RAM. Uma memória RAN relativamente pequena é necessária para armazenar temporariamente dados e valores intermediários calculados.
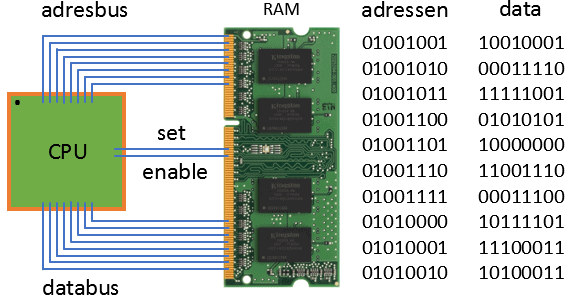
A CPU está conectada à memória por meio de um barramento de endereços e um barramento de dados.
- Conjunto: os bits são armazenados na RAM
- Habilitar: bits são recuperados da RAM
Bits e bytes de dados na RAM podem incluir:
- números: dados de sensores/dados para atuadores/cálculos
- endereços de sensores (entrada) e atuadores (saída)
Os dados na RAM podem ser:
- letras: códigos ASCII, números, letras, símbolos
- instruções: conjunto de instruções do processador
O processador funciona de acordo com a chamada ISA (Arquitetura de Conjunto de Instruções) ou um conjunto de instruções. O ISA é uma lista de instruções programadas pelo fabricante e utilizadas pelo processador. O ISA difere por processador e é altamente dependente da aplicação para a qual o processador é usado. Abaixo estão alguns exemplos:
- LOAD o processador recupera um valor da memória RAM
- STORE o processador armazena um valor na memória RAM
- ADD o processador soma dois números juntos
- CLR o processador limpa um valor na memória RAM
- COMPARE o processador compara dois números entre si
- SALTAR SE o processador pular para um endereço de memória específico na RAM (condição de comparação)
- OUT o processador envia informações para uma saída
- NO processador solicita informações de uma entrada
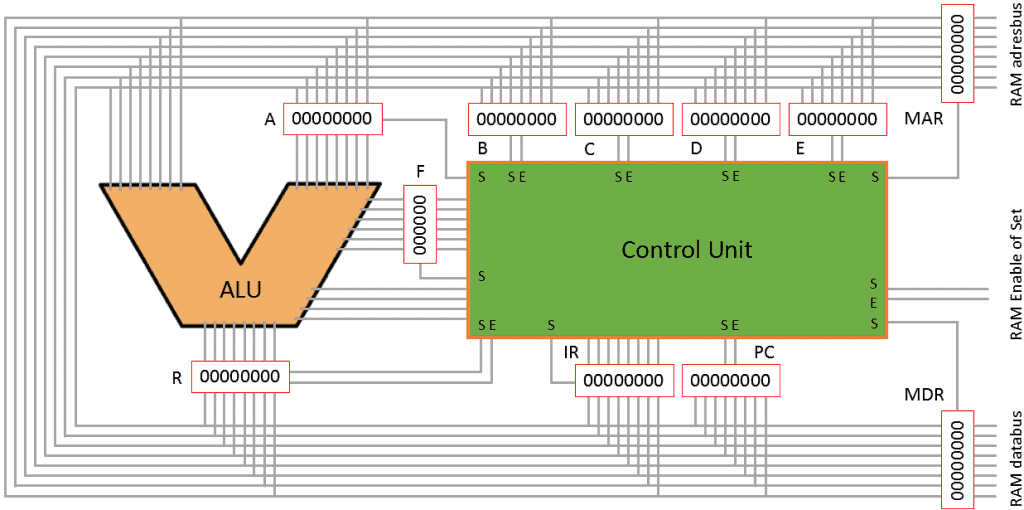
Para que um processador opere em velocidade máxima de clock, ele usa memória RAM interna. Estes são chamados de “registros”. Os registradores são blocos funcionais particularmente importantes em muitos sistemas digitais. Eles consistem em uma coleção de circuitos flip-flop que podem armazenar temporariamente (lembre-se) de um número binário. Os diferentes tipos de registros são:
- Registro A: registro para entrada A para ALU
- Registro B: registro para entrada B para ALU
- Registro de trabalho: propósito geral, para armazenar resultados (provisórios)
- Registro de Instrução: A instrução atual a ser executada pelo processador é armazenada aqui
- Registrador de endereço (contador de programa): contém o endereço da próxima instrução a ser executada
- Registro de bandeira: o número (após um cálculo) é: zero, negativo, positivo, muito grande, par ou ímpar
- Registro de Ponto Flutuante: número com dígitos após a vírgula decimal
- Registrador de deslocamento: memória na qual os dados mudam um bit durante cada pulso de clock
- Registro de dados de memória: buffer entre CPU e RAM para dados de memória
- Registro de endereço de memória: buffer entre CPU e RAM para endereço de memória
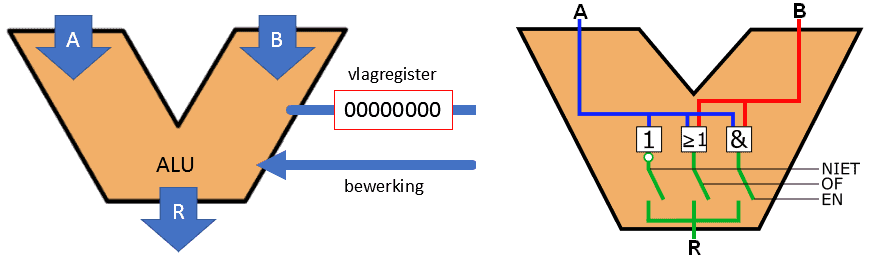
A ALU (Unidade Lógica Aritmética) realiza todas as operações aritméticas e lógicas (AND, OR, NOT, etc.).
- 2 entradas para ALU: A e B
- 1 entrada: qual operação a ALU deve realizar
- 1 saída: R (Resultado) vai para um registrador
- 1 saída: registro de sinalizador
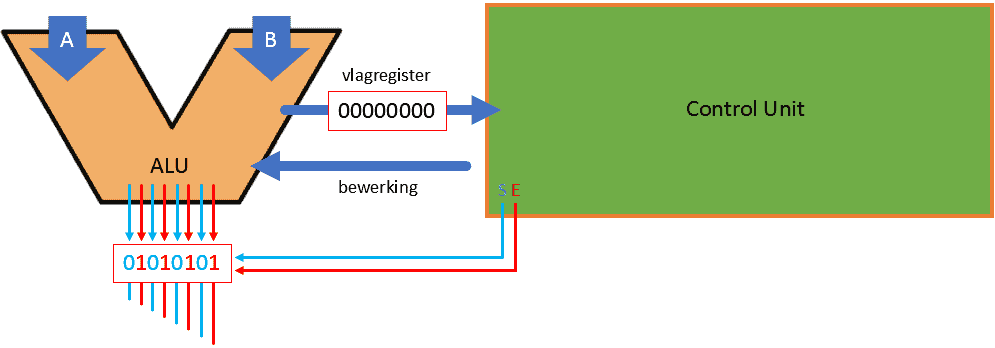
1. A ALU deseja enviar 01010101
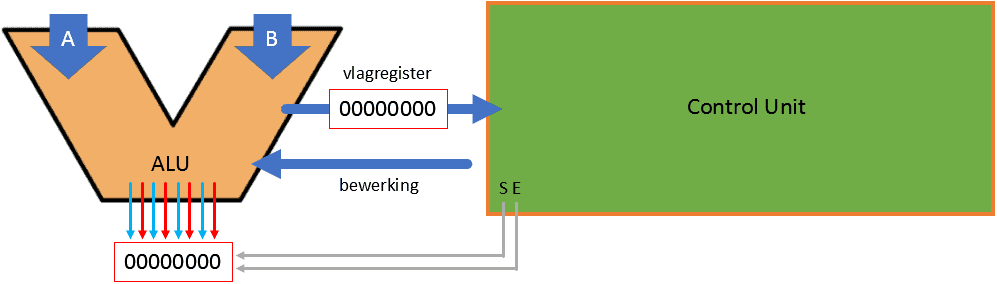
2. Primeiramente a Unidade de Controle deve criar o conjunto “1”.
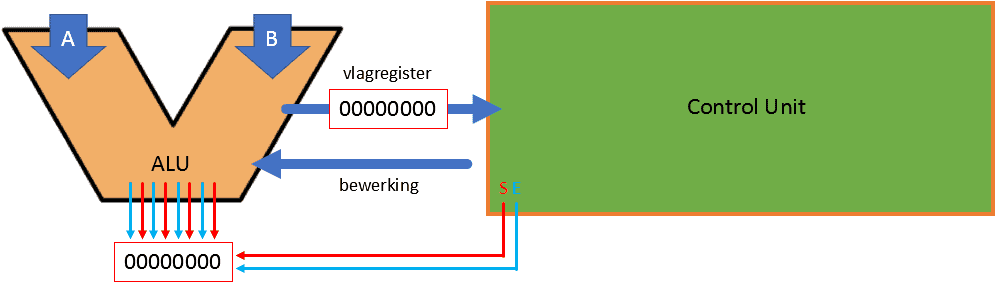
3. O registro está concluído
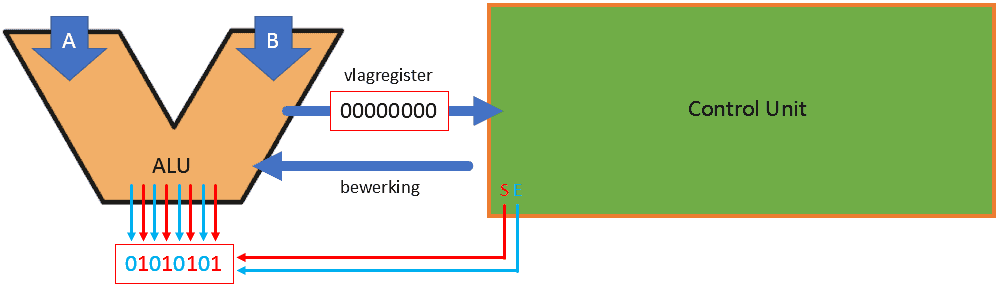
4. Depois disso, é feita a Habilitação “1”.
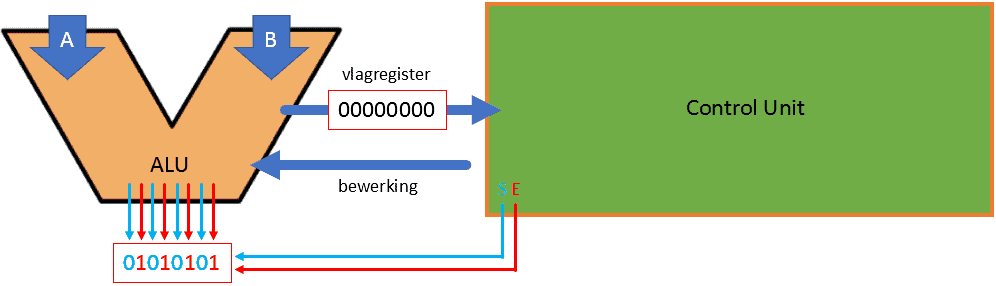
5. Os dados da ALU são colocados em um barramento
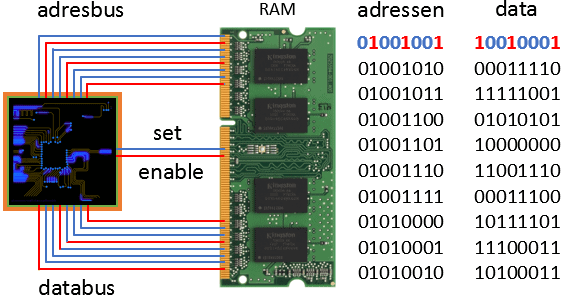
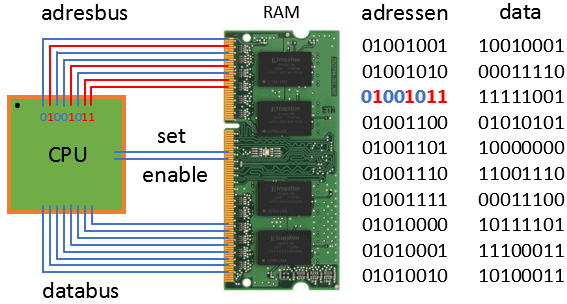
A CPU deseja recuperar dados da RAM:
1. CPU envia um endereço para RAM (01001001)
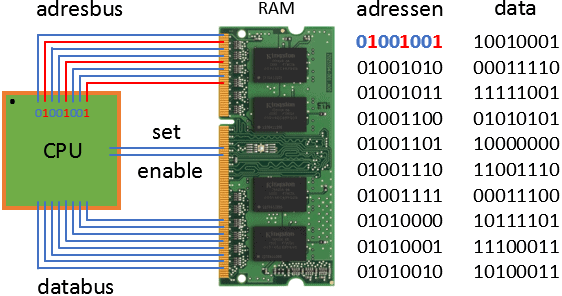
2. CPU deseja receber informações; “habilitar” = 1
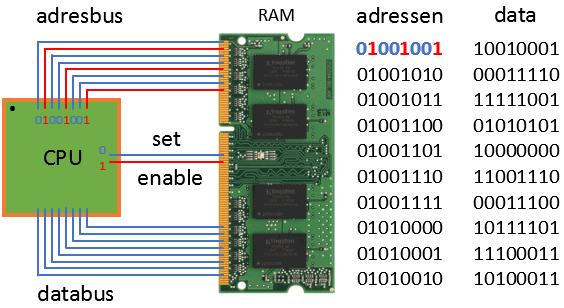
3. RAM envia dados do endereço 01001001 para a CPU
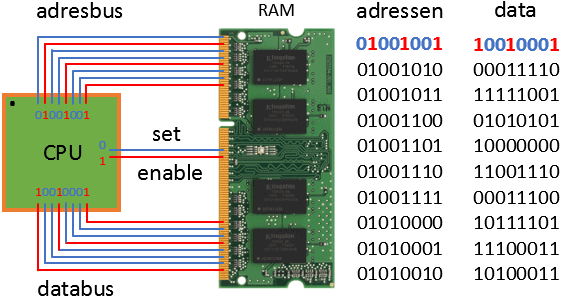
4. CPU processa as informações
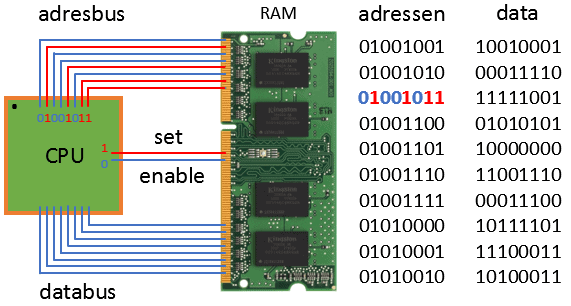
A CPU deseja armazenar dados na RAM:
1. CPU envia um endereço para RAM (01001011)
2. CPU deseja armazenar informações; “conjunto” = 1
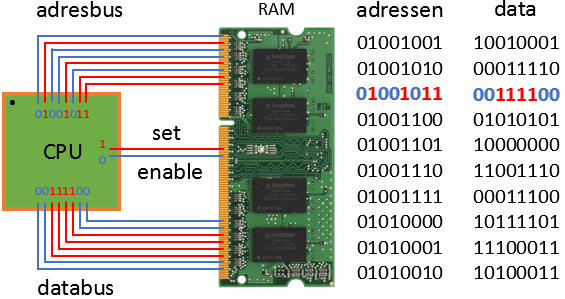
3. A CPU envia dados (00111100) para o endereço 01001011 na RAM.
Os dados na RAM agora são substituídos de: 11111001 para: 00111100
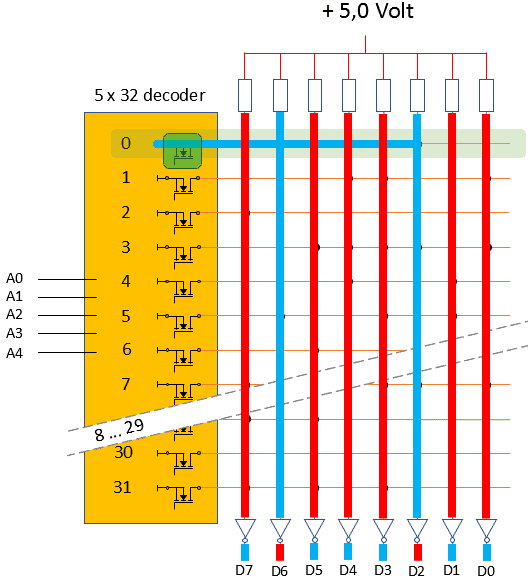
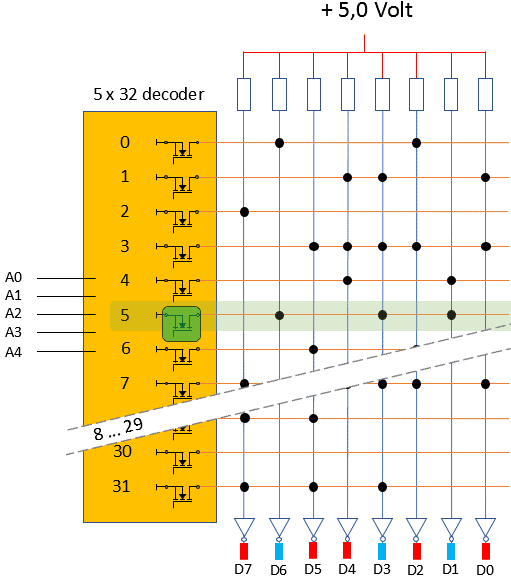
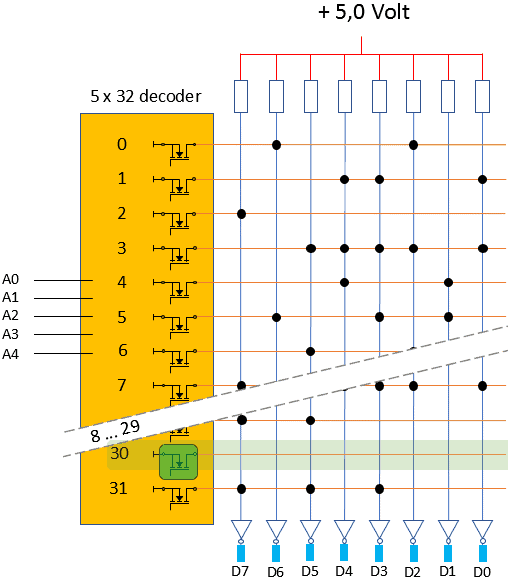
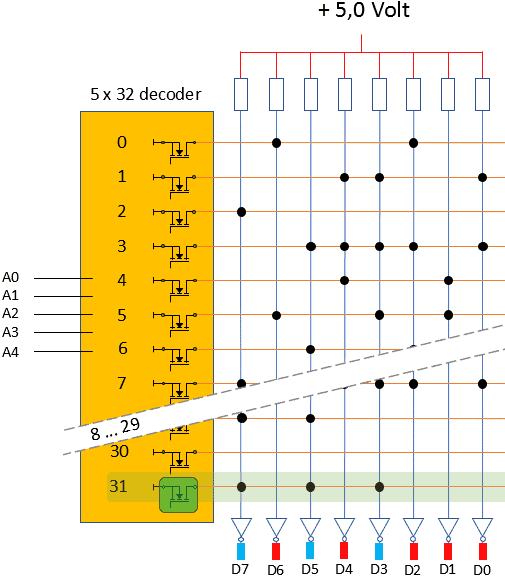
Memória ROM:
ROM é uma abreviatura de: Read Only Memory. Esta memória foi programada pelo fabricante. O circuito de memória é organizado com conexões fixas. A ECU inicia o programa de software (inicialização) a partir da memória ROM. A memória ROM é uma memória lenta. Durante a inicialização, os dados são copiados da ROM para a RAM.
Abaixo estão quatro exemplos de leitura da ROM.




Páginas relacionadas: