Tópicos:
- Erro do driver
Erro de controle:
O princípio de Ackermann garante que, ao virar, uma roda gire mais para dentro do que a outra roda. Para mais informações sobre isso, consulte a página Princípio de Ackermann en dedo do pé na curva.
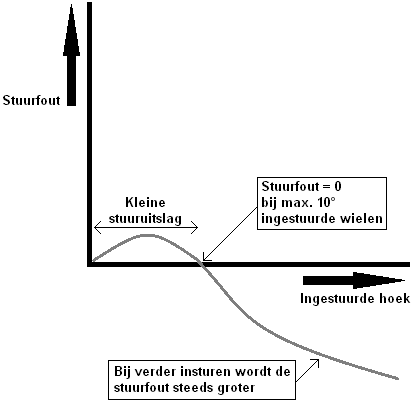
Ao ler as páginas mencionadas, ficará claro que a roda dianteira esquerda e a roda dianteira direita têm ângulos de direção diferentes. Portanto, quase sempre ocorre um erro de direção. O erro de direção significa que os dois ângulos inseridos não são iguais e, portanto, uma roda escorrega mais que a outra. Existe apenas uma situação em que não ocorre nenhum erro de direção. Isto ocorre ao virar com um pequeno ângulo de direção, até aproximadamente 10 graus (ver imagem).
O eixo X na figura mostra o ângulo de direção e o eixo Y o erro de direção. No canto esquerdo (então em X = 0) você dirige em frente. A linha sob “Pequeno ângulo de direção” corre positivamente ao longo do eixo X. Esta linha indica que o erro de direção com um ângulo de direção máximo de 10 graus é 0. Portanto, com um ângulo de direção máximo de 10 graus, não há erro de direção. Não haverá então deslizamento nas rodas dianteiras. Isto é construído deliberadamente desta forma, porque ao dirigir em altas velocidades (por exemplo, na rodovia) o ângulo de direção geralmente fica em torno de 10 graus. Em alta velocidade, as rodas dianteiras não escorregam com um ângulo de direção máximo de 10 graus, proporcionando máxima aderência. Com mais direção, o erro de direção torna-se muito maior. Em princípio isso não é um problema, porque normalmente acontece na cidade, em velocidades mais baixas. Em velocidades mais baixas o erro de direção tem menos influência do que em velocidades mais altas.