Tópicos:
- Introdução
- Sinais do resolvedor
- Componentes do resolvedor
Introdução:
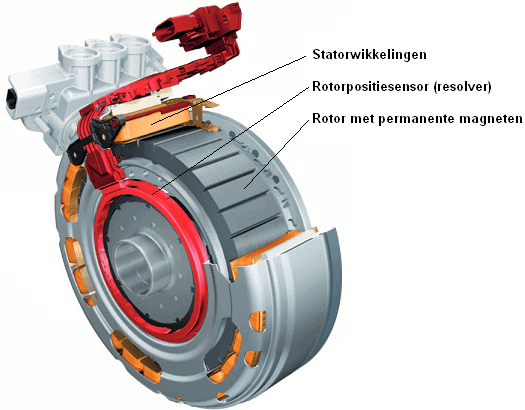
Para o funcionamento do motor elétrico síncrono é essencial que a lavagem correta através do inversor são controlados. Para determinar qual bobina (U, V ou W) deve ser energizada, a ECU do inversor lê a posição do rotor, que é medida pelo sensor de posição do rotor, também chamado de “resolver”.
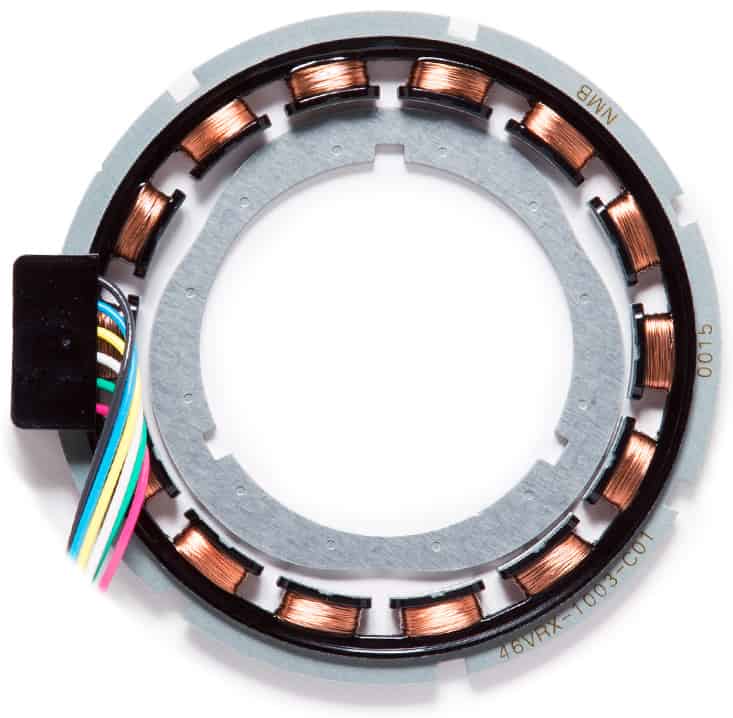
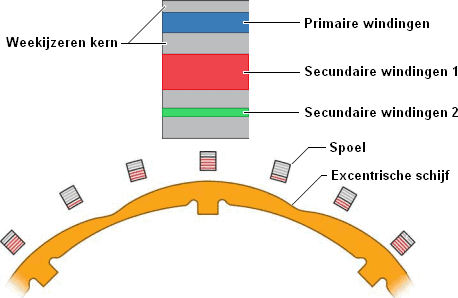
O resolver consiste em um anel externo com várias bobinas no interior de uma placa excêntrica rotativa. A distância entre a placa excêntrica e as bobinas muda constantemente à medida que gira.
Sinais do resolvedor:
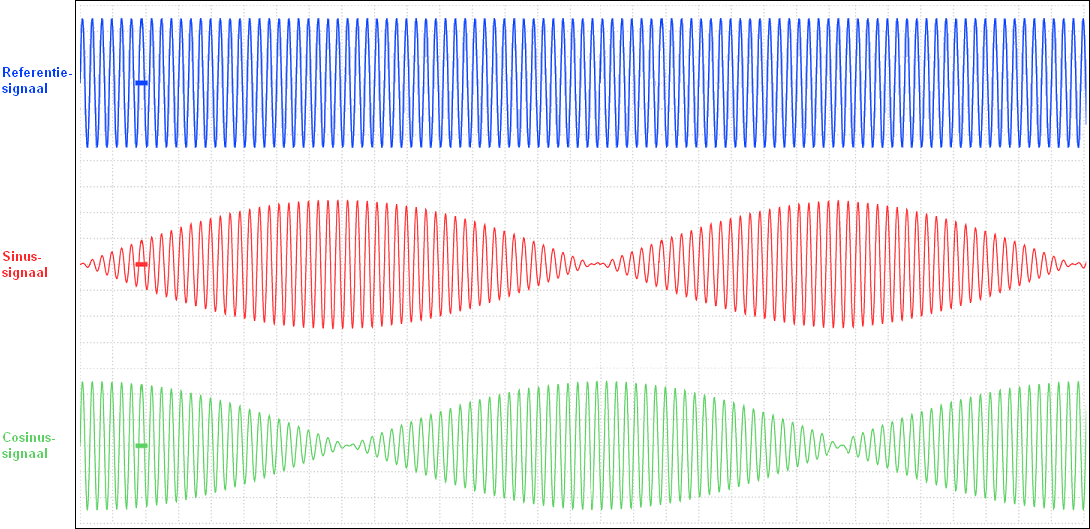
A ECU fornece ao resolver um sinal de referência. O entreferro entre uma bobina e o excêntrico cria uma tensão alternada senoidal alta ou baixa. Com alta amplitude no sinal senoidal vermelho ou verde (veja a figura abaixo), o entreferro entre o excêntrico e a bobina é pequeno.
O resolver funciona tanto parado quanto com o motor elétrico em funcionamento: em ambos os casos a ECU deve saber em que posição se encontra o rotor.
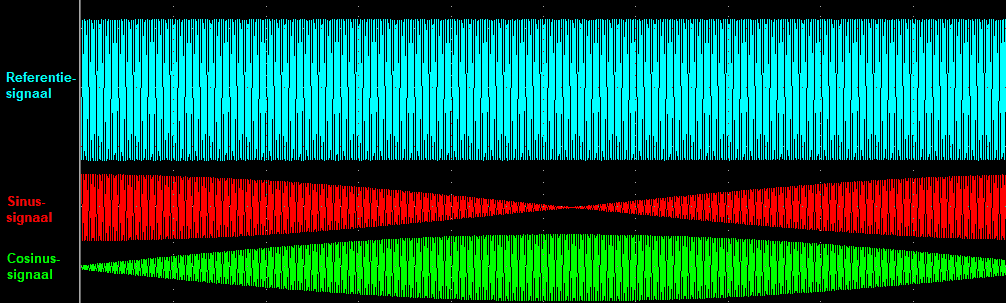
A imagem abaixo mostra os sinais teóricos. Na realidade, a frequência é muito mais elevada, pelo que a variação na amplitude dos sinais seno e cosseno é claramente visível.
As duas imagens abaixo mostram uma medição real em um resolvedor. Aqui também vemos o sinal de referência na parte superior e os sinais seno e cosseno abaixo. A primeira imagem está parada: o motor elétrico não funciona. A altura do sinal senoidal e do sinal cosseno permanece constante. Com base no nível desta tensão alternada, a ECU sabe onde está o rotor quando está parado.
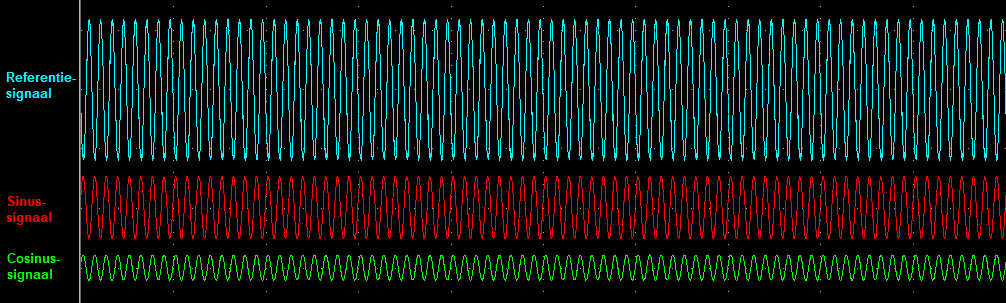
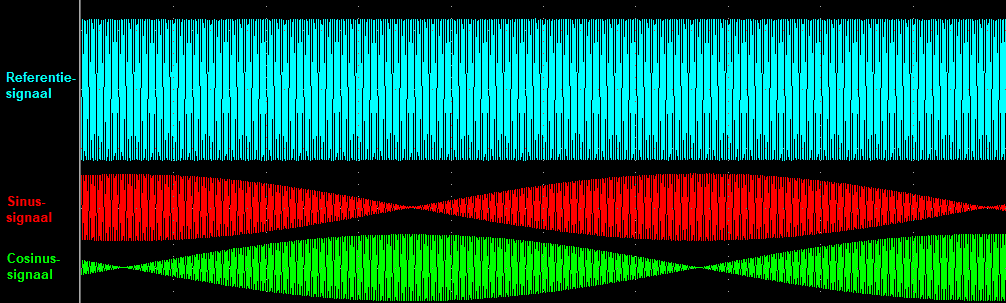
Nas próximas duas imagens o tempo por divisão foi reduzido. A frequência do sinal de referência no resolver permanece inalterada, mas é medida durante um período de tempo maior na medição. Como resultado, vemos que as amplitudes dos sinais seno e cosseno mudam claramente. A primeira imagem foi medida em baixa velocidade do rotor e a segunda em velocidade aumentada. À medida que a velocidade aumenta, a frequência dos sinais seno e cosseno aumenta (mais sinais por unidade de tempo), mas a amplitude (o nível da tensão alternada) permanece constante.
Componentes do resolvedor:
O resolver do VW E-Golf contém 30 bobinas conectadas em série. Cada bobina do resolver consiste em um núcleo de ferro macio com três enrolamentos diferentes: primário, secundário 1 e secundário 2.
A bobina primária (azul) é alimentada com tensão alternada de alta frequência.
O número de voltas secundárias (1 vermelha, 2 verdes) é diferente em cada bobina.
Quando o came da placa excêntrica se move ao longo da bobina, a indutância nos enrolamentos secundários é amplificada. Devido ao número de voltas dos enrolamentos secundários 1 e 2 em cada bobina, isso também resulta em tensões diferentes nos enrolamentos secundários. A ECU do inversor pode calcular a posição do rotor com base nas tensões dos enrolamentos secundários 1 e 2.
O ajuste do resolver no rotor é muito preciso: muitos fabricantes prescrevem que todo o motor elétrico deve ser substituído caso ocorram problemas com o resolver. Depois de desmontar (acidentalmente) o resolver ou desapertar os parafusos na parte externa da carcaça do motor elétrico, o resolver não poderá mais ser remontado corretamente. Também nesse caso, muitos fabricantes prescrevem a substituição do motor elétrico.
A posição exata do rotor de um motor síncrono deve ser conhecido durante a paragem e durante a condução. Se o sensor estiver com defeito, o veículo não poderá mais circular.
Do motor assíncrono por outro lado, não é necessária qualquer monitorização da posição do rotor. O sensor de posição do rotor emite quatro pulsos por revolução do rotor. Esta medição monitora a quantidade máxima de escorregamento entre o campo magnético rotativo entre o estator e o rotor. O sensor Hall é frequentemente usado como sensor. O sensor Hall transmite pulsos para a ECU quando o rotor gira, mas não pode realizar uma medição quando parado, ao contrário do resolver do motor síncrono. Às vezes, os fabricantes também optam por usar o resolver do motor síncrono como um sensor de posição do rotor.
Páginas relacionadas: