Tópicos:
- Introdução
- Motor elétrico CA (síncrono, com ímãs permanentes)
- Controle AC do motor síncrono
- Motor elétrico CA (motor assíncrono de gaiola de esquilo)
- Mapa de eficiência do motor elétrico síncrono e assíncrono
Introdução:
Um motor elétrico é usado para dirigir um veículo híbrido ou totalmente elétrico. O motor elétrico converte energia elétrica (da bateria ou do extensor de autonomia) em movimento para acionar as rodas. Além disso, o motor elétrico também pode converter energia cinética em energia elétrica ao frear o motor: frenagem regenerativa. Nesse caso, o motor elétrico funciona como um dínamo. Por causa dessas duas funções, também chamamos o motor elétrico de “máquina elétrica”.
As opções para colocação do motor elétrico em um veículo híbrido são:
- No motor de combustão, onde a transmissão é feita através de correia múltipla ou diretamente através do virabrequim;
- Entre o motor e a caixa de velocidades: o eixo de entrada da caixa de velocidades é acionado pelo motor elétrico;
- Integrado na caixa de velocidades;
- No diferencial;
- Nos cubos das rodas (motor do cubo).
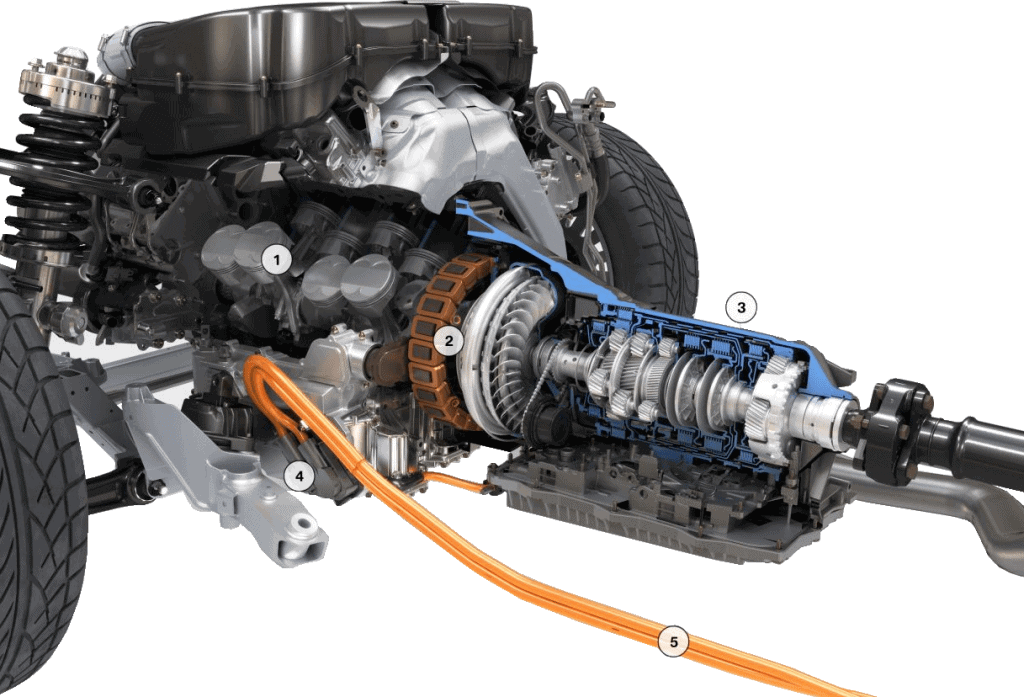
O motor elétrico de um carro totalmente elétrico é frequentemente montado no eixo traseiro. A imagem abaixo mostra o motor elétrico com inversor em carcaça cilíndrica e comando final de um Tesla.

Motor elétrico CA (síncrono, com ímãs permanentes):
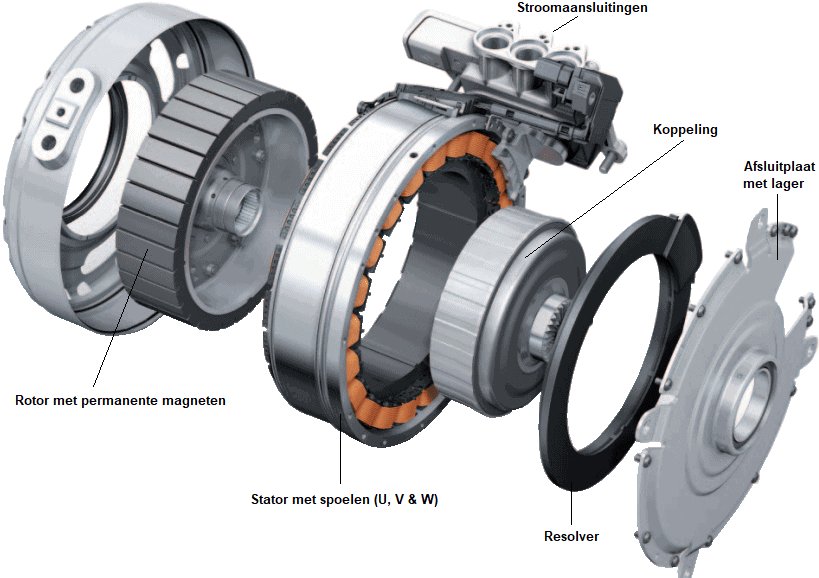
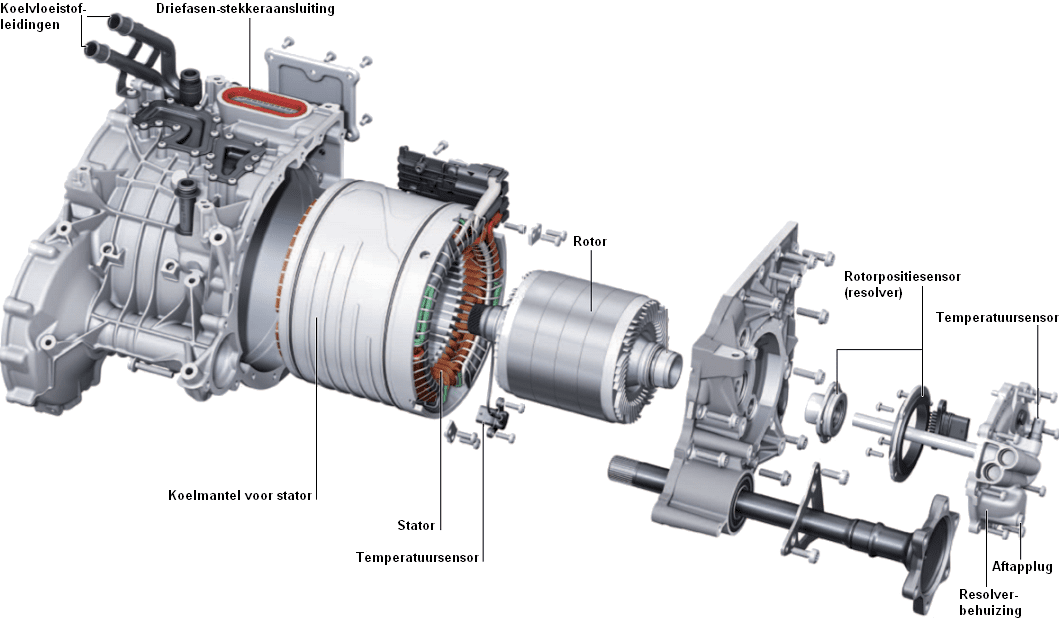
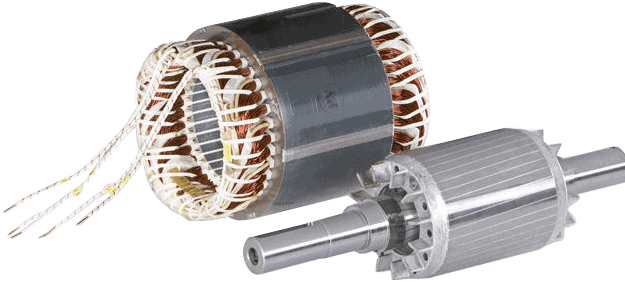
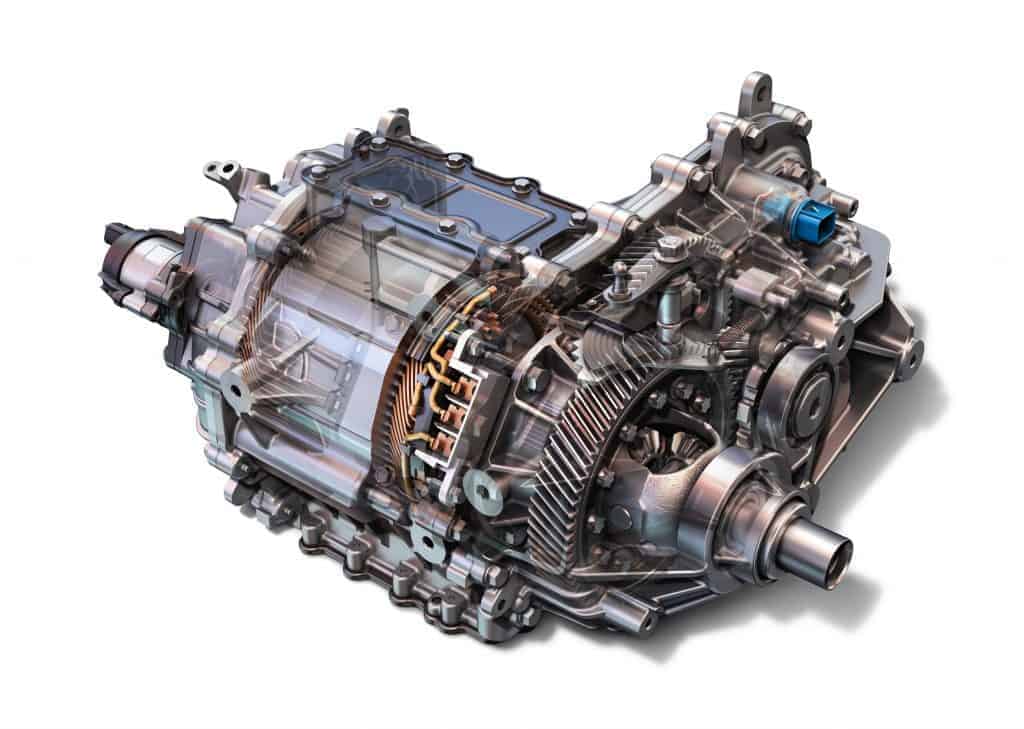
A imagem a seguir mostra as peças de um motor elétrico Audi (síncrono). Este tipo é usado nas variantes híbridas do A6 e A8. Listaremos brevemente os componentes. Esses componentes são descritos detalhadamente nos parágrafos seguintes.
O rotor com ímãs permanentes começará a girar como resultado de uma mudança no campo magnético do estator. O rotor está conectado à embreagem, que pode conectar ou desconectar o motor de combustão e o motor elétrico (em conjunto com uma embreagem (não mostrada)) em diferentes condições de operação. A posição do rotor é determinada pela resolver medido: esses dados são importantes para que os drivers IGBT controlem as bobinas do estator no momento certo.
O motor elétrico com ímãs permanentes pode ser controlado tanto por corrente contínua (tensão contínua) quanto por corrente alternada (tensão alternada).
O motor síncrono é um dos motores elétricos mais utilizados em veículos híbridos ou totalmente elétricos. Este tipo de motor elétrico é composto por um estator com enrolamentos e um rotor com diversos ímãs permanentes. O rotor gira na mesma velocidade que o campo magnético do estator. O motor síncrono pode ser controlado da seguinte forma:
- AC: controlado por sinal senoidal (corrente alternada).
- DC: controlado com sinal quadrado ou trapezoidal (corrente contínua)
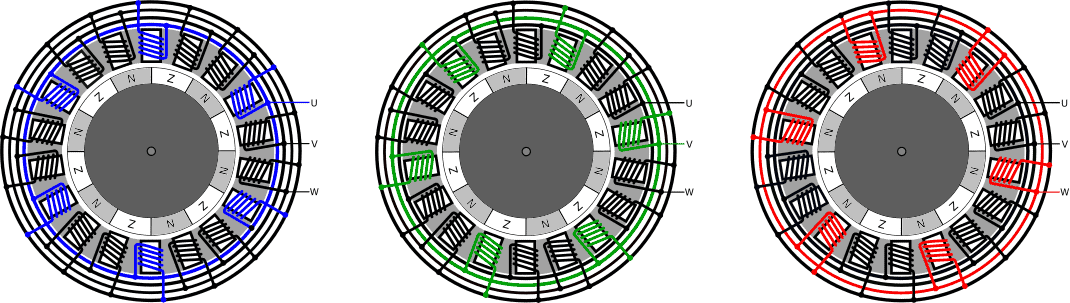
O estator do motor síncrono é composto por três grupos de bobinas do estator: U, V e W. Cada grupo contém três conjuntos de seis bobinas conectadas em paralelo que estão distribuídas por toda a circunferência do estator. Cada terceira bobina pertence à mesma série.
- Bobinas em U: azul
- Bobinas em V: verdes
- Bobinas W: vermelhas
O rotor contém vários ímãs permanentes. Ao energizar alternadamente as bobinas no estator, um campo magnético rotativo é criado. O rotor segue o campo rotativo e, portanto, gira.
Controle AC do motor síncrono:
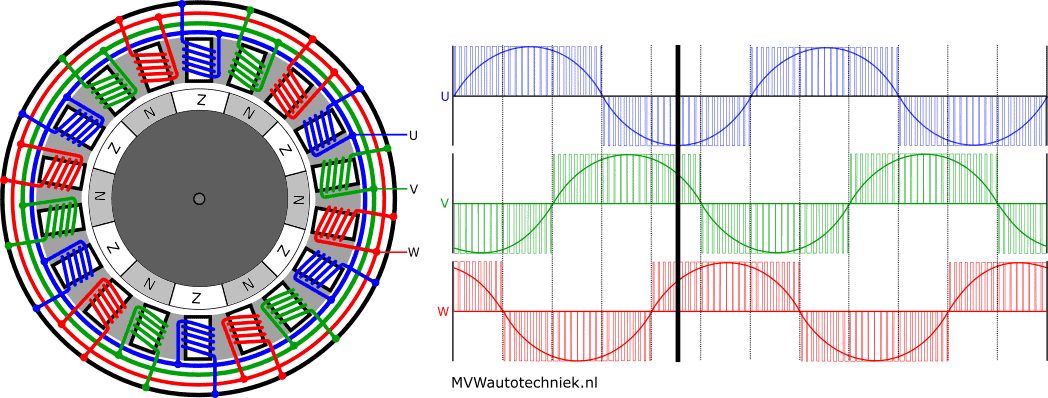
O controle CA usa controle controlado por frequência ou comutação senoidal. As bobinas do estator são alimentadas com uma tensão alternada de onda senoidal trifásica para girar o rotor.
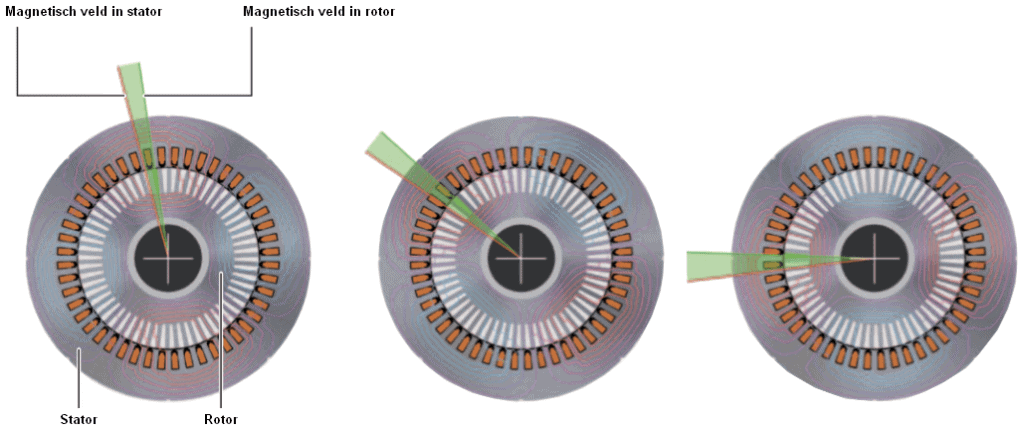
A imagem abaixo mostra a posição do rotor com uma bobina em U de excitação máxima. Como resultado do campo magnético, os pólos norte posicionaram-se diretamente opostos às bobinas em U energizadas. O cursor no gráfico ao lado do motor elétrico indica o controle das bobinas naquele momento.
Para sua informação: o rotor na explicação gira ao controlar as bobinas do estator sentido horário.
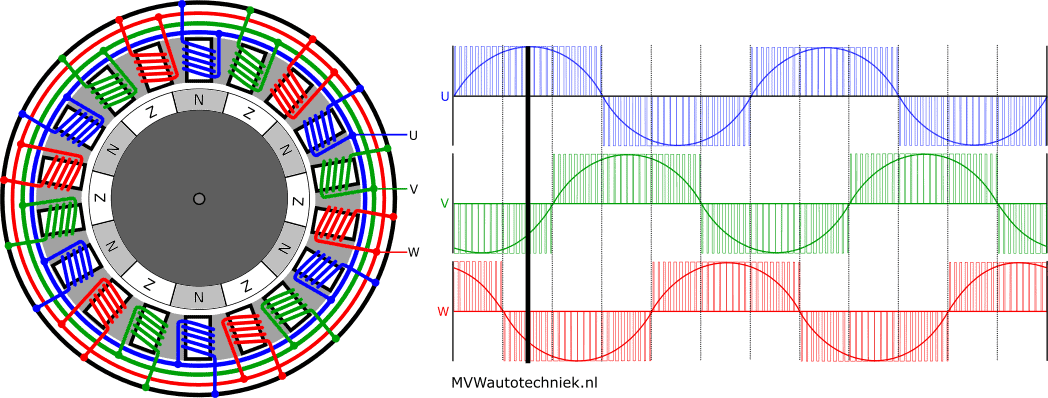
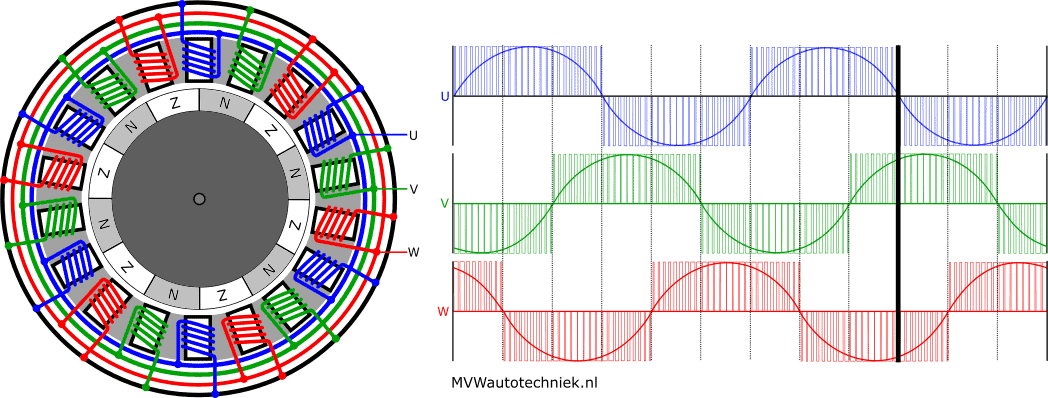
Na imagem a seguir, a onda senoidal, ou seja, a corrente alternada através da bobina U, é maximamente negativa. Durante este controle, os pólos sul do rotor ficam diretamente opostos às bobinas do estator energizadas (U).
Na verdade, existe um pequeno espaço de ar entre os pólos norte e sul do rotor. Durante a mudança do pólo sul para o pólo norte, a direção da corrente na bobina em U muda. Avançar:
- A corrente através da bobina V (verde) é quase máxima positiva; o pólo norte também está quase oposto à bobina.
- A corrente através da bobina W foi maximamente negativa e está aumentando. O pólo sul girou além da bobina.
Para dar uma ideia de como a corrente flui, a animação abaixo mostra a rotação do rotor devido à corrente alternada.
Motor elétrico CA (motor assíncrono de gaiola de esquilo):
O motor elétrico de gaiola de esquilo ou armadura de curto-circuito é um motor assíncrono. A diferença entre o motor síncrono com ímãs permanentes e o motor assíncrono está no rotor: trata-se de um tambor de ferro macio com condutores no sentido longitudinal. O rotor funciona de forma assíncrona com o estator, o que significa que existe uma diferença de velocidade entre o rotor e a velocidade magnética do estator. O estator é exatamente o mesmo.
O rotor do motor elétrico assíncrono consiste em bobinas em curto-circuito; as bobinas U, V e W estão conectadas entre si em um lado. Quando o rotor está no campo rotativo do estator, uma tensão de indução é criada nas bobinas do rotor. Como as bobinas do rotor estão em curto-circuito entre si, uma corrente flui através delas. Essa corrente faz com que o rotor gere um campo magnético, criando um torque. Como o funcionamento do motor elétrico assíncrono é baseado na lei da indução, também o chamamos de motor de indução.
O torque fornecido afeta o deslizamento entre o campo magnético rotativo no estator e a velocidade do rotor.
O motor assíncrono apresenta uma série de vantagens e desvantagens em comparação ao motor síncrono.
Benefícios:
- rotor relativamente simples, robusto e barato;
- alto torque em baixa velocidade.
Contras:
- menor densidade de potência (por massa) e eficiência (eficiência). As correntes nas bobinas do rotor em curto-circuito dão origem a perdas adicionais no rotor;
- a velocidade não pode ser controlada com precisão porque depende da carga. Por si só isto não tem de ser uma desvantagem: com um bom sistema de controlo a velocidade do motor assíncrono também pode ser ajustada;
- alta corrente de partida.
A posição do rotor e a velocidade do motor assíncrono são medidas por um sensor de posição do rotor. Os sensores Hall geralmente fornecem pelo menos quatro pulsos por rotação do rotor para transmitir a posição e a velocidade do rotor. Não chamamos esse tipo de sensor de posição do rotor de resolver, como é o caso do motor síncrono.
Ao contrário do motor síncrono, o sensor de posição do rotor não é necessário para saber a posição do rotor quando parado. A posição do rotor é importante durante a rotação: deve-se tomar cuidado para garantir que o deslizamento entre o campo magnético rotativo e o rotor não se torne muito grande. Quando o campo rotativo se move muito rápido, pode surgir uma situação em que o rotor repentinamente queira girar na outra direção. As forças que surgem podem ser desastrosas para os componentes mecânicos e elétricos.
Alguns fabricantes também optam por usar um motor assíncrono resolver aplicando. O motivo é desconhecido para mim. Em qualquer caso, o resolver é extremamente preciso tanto quando está parado como em funcionamento, o que pode beneficiar o controle preciso.
Mapa de eficiência do motor elétrico síncrono e assíncrono:
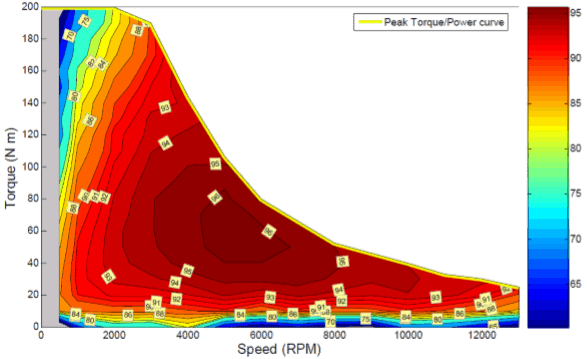
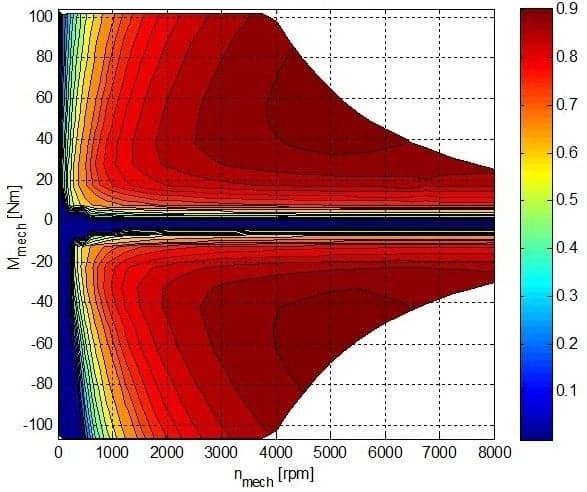
As imagens abaixo mostram a eficiência do motor elétrico síncrono (esquerda) e do motor elétrico assíncrono (direita).
- O motor elétrico síncrono é muito eficiente. A eficiência está acima de 90% em uma grande área, com valores de pico de até 96%. A partir de 2000 rpm ocorre o enfraquecimento do campo, fazendo com que o torque máximo diminua.
- O motor assíncrono tem uma eficiência significativamente menor do que o motor síncrono em velocidades mais baixas.
Páginas relacionadas: