Tópicos:
- ESP geral
- Outros nomes para ESP
- Subviragem
- Chateado
- Sensor de ângulo de direção
- Sensor de aceleração transversal (sensor G)
- Sensor de momento de guinada (sensor de guinada)
- Sensor de pressão do freio
ESP geral:
ESP é uma abreviatura de Programa Eletrônico de Estabilidade e funciona em combinação com ABS e ASR. Se o veículo estiver equipado com ABS (Sistema de Frenagem Antibloqueio) e ASR/ASC (Regulação/Controle Antiderrapante), o sistema ESP pode ser adicionado com a ajuda de vários sensores adicionais e um ajuste de software. Os componentes como os sensores de velocidade das rodas e a bomba/unidade de controle ABS também são usados para o sistema ESP. O sistema ESP também regula a redução da potência do motor; fechando mais o acelerador ou desligando a ignição.
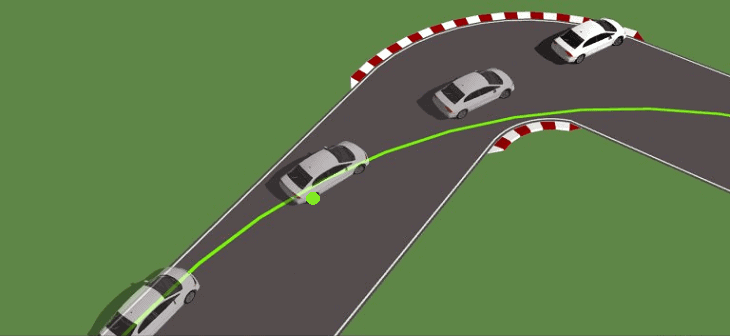
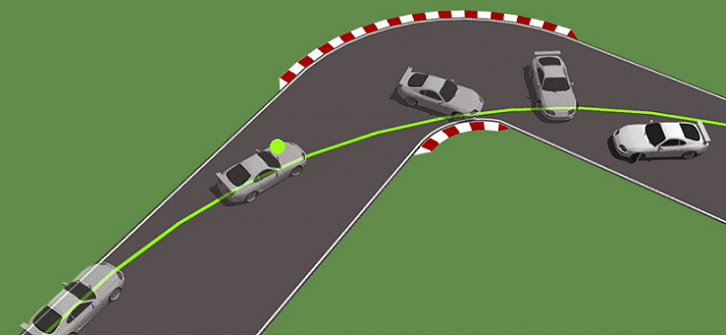
O objetivo do sistema ESP é melhorar o comportamento nas curvas (subviragem e sobreviragem). Isto aplica-se, entre outras coisas, a situações em que o travão é aplicado numa curva ou quando ocorre uma manobra evasiva. O sistema ESP trava uma roda do veículo, de modo que as características normais de direção são restauradas. Abaixo estão as 2 situações em que a roda indicada em verde está freada. Ao frear, o veículo seguirá a linha verde, em vez de ficar fora de controle. Vários componentes ESP necessários estão descritos na parte inferior desta página.
Outros nomes para ESP:
Os fabricantes de automóveis costumam usar nomes próprios para ESP em seus modelos, embora a operação seja a mesma. Esses outros nomes são dados para fazer o sistema parecer “mais luxuoso” do que o ESP padrão. Exemplos disso são:
- ASC + T: Controle Automático de Estabilidade e Tração (BMW de antiga geração anterior a 1996)
- DSC: Programa de Estabilidade Dinâmica: BMW, Jaguar, Land Rover, Mazda, Mini
- DSTC: Estabilidade Dinâmica e Controle de Tração (Volvo)
- ESP: Programa Eletrônico de Estabilidade (Alfa Romeo, Audi, Cadillac, Chevrolet, Chrysler, Citroen, Fiat, Ford, Hyundai, Jeep, Kia, Mercedes, Mitsubishi, Nissan, Opel, Peugeot, Renault, Saab, Seat, Skoda, Smart, Suzuki , Volkswagen
- PSM: Gerenciamento de Estabilidade Porsche (Porsche)
- VDC: Controle Dinâmico do Veículo (Alfa Romeo)
- VDCS: Sistema de Controle Dinâmico do Veículo (Subaru)
- VSC: Controle de estabilidade do veículo (Lexus, Toyota)
- VSA: Assistência à estabilidade do veículo (Honda)
Subviragem:
A subviragem ocorre quando os pneus dianteiros não têm mais aderência suficiente na superfície da estrada. O carro fará uma curva mais suave do que o pretendido, por isso terá uma tendência maior para seguir em frente. As rodas dianteiras deslizarão, portanto, para fora da curva. A subviragem pode ser eliminada para garantir que as rodas dianteiras tenham novamente aderência suficiente à superfície da estrada. Para conseguir isso, você pode usar menos gasolina ou dirigir menos. Ainda mais direção não ajudará contra a subviragem, pode até piorar a situação porque as rodas terão menos aderência. A maioria dos fabricantes de automóveis ajusta o chassi de forma que o carro tenha tendência a subvirar em vez de sobrevirar. A razão é que o motorista médio libera imediatamente o acelerador em tal situação (o que pode ser a solução que dá aderência novamente ao carro).
Chateado:
A sobreviragem ocorre quando os pneus traseiros não aderem mais à superfície da estrada. Os pneus traseiros do carro deslizarão para fora da curva. A traseira então quer ultrapassar a dianteira, fazendo com que o veículo gire sobre seu eixo. A sobreviragem pode ser corrigida contra-direção e desaceleração para carros com tração traseira (por exemplo, BMW) e um pouco mais de gasolina para carros com tração dianteira (por exemplo, Volkswagen). Freqüentemente, especialmente no automobilismo, é feito uso consciente da sobreviragem para passar por uma combinação de curva com mais facilidade e rapidez. Num caso extremo, esta forma de perturbação é chamada de “deriva”. A sobreviragem é geralmente mais perigosa do que a subviragem, porque a maioria dos motoristas tem menos probabilidade de conseguir corrigi-la. É por isso que, ao projetar o carro, o chassi é ajustado mais para “subviragem”, porque isso é mais fácil de corrigir.
Sensor de ângulo de direção:
O sensor do ângulo de direção está montado na coluna de direção. Isso pode ficar próximo à cremalheira da direção, mas também no interior, entre as alavancas dos piscas / limpadores, conforme mostrado na imagem à direita. Estes são os interruptores da coluna de direção de um BMW.
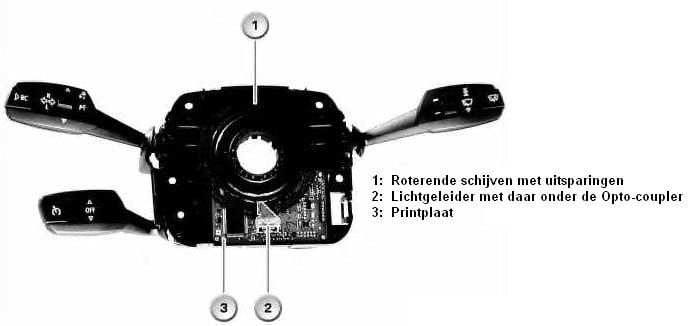
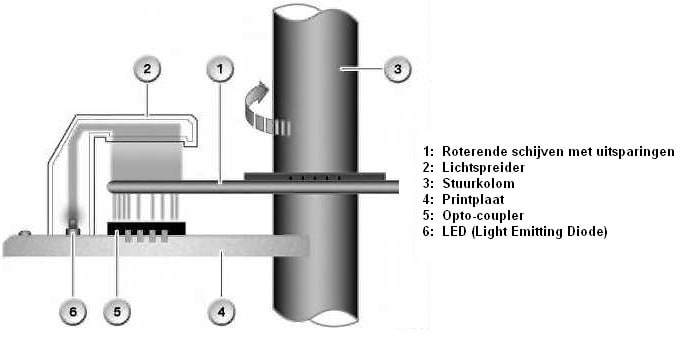
A tarefa do sensor do ângulo de direção é medir o ângulo de rotação do volante. Este sensor utiliza um ou mais optoacopladores que medem a transmissão de luz dos discos rotativos. As lacunas de luz são diferentes em cada local de um disco giratório, permitindo reconhecer a posição exata do volante. Todos os recessos nos discos criam um sinal quadrado assimétrico. O acoplador óptico pode converter um sinal de luz em uma tensão que é então repassada para a unidade de controle.
Sensor de aceleração transversal (sensor G):
O sensor de aceleração lateral (também chamado de sensor G das forças G) é colocado tanto quanto possível no centro do carro. Nas curvas, a placa móvel (ver imagem abaixo, número 2) se desloca entre os capacitores (1). Os capacitores têm uma tensão de 5 volts. Quando a placa está no meio (ou seja, quando o carro está andando em linha reta), a tensão em ambos os capacitores é de 2,5 volts. Quando o carro faz uma curva (no caso da imagem à esquerda), a placa se desloca para um lado devido à força centrífuga e à força centrípeta.
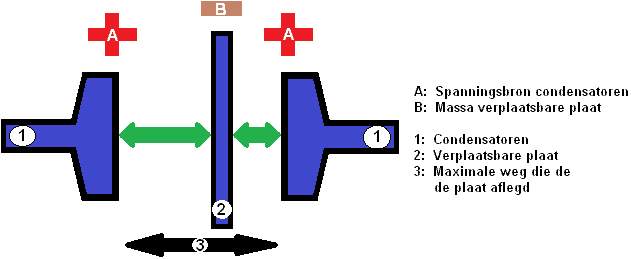
Quando a placa se desloca, a capacitância do capacitor direito cai. Agora não será 2,5 Volts, mas, por exemplo, 1,5V. A unidade de controle ESP reconhece a diferença entre os dois capacitores e pode determinar a partir disso quão grande é a força centrífuga ou a força centrípeta (ou seja, quão acentuada é a curva. Desta forma, pode-se determinar se o carro está sobrevirando, por exemplo) . Os valores deste sensor de aceleração lateral são usados para comparar os dados dos sensores de velocidade das rodas e determinar se o sistema ESP deve intervir.
Sensor de momento de guinada (sensor de guinada):
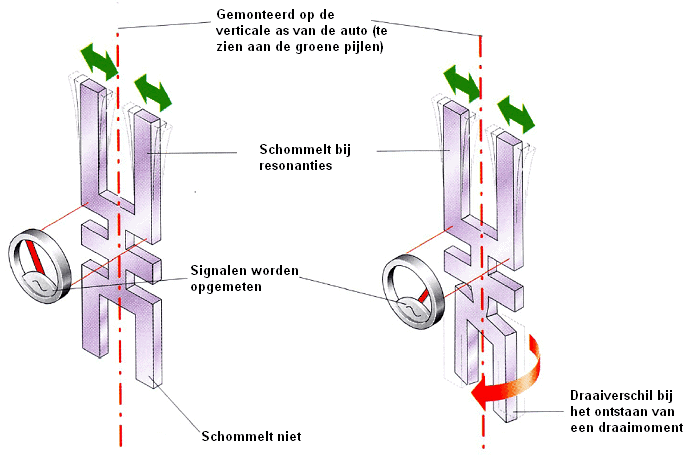
O sensor de momento de guinada, também chamado de “sensor de guinada” em inglês, é colocado o mais possível no centro do carro junto com o sensor de aceleração lateral. O sensor fornece os dados de que o sistema ESP necessita. O sensor de momento de guinada registra a tendência do veículo de girar em torno do eixo vertical. O valor desta medição é chamado de velocidade de rotação e é exibido em graus por segundo.
O sensor consiste em dois diapasões. O diapasão superior é feito para vibrar (ressonância) a 11000 Hz (11kHz) com uma tensão alternada e gira quando o veículo passa por uma curva. Quanto mais acentuada a curva, mais o diapasão inferior é torcido em relação ao diapasão superior. O princípio é baseado em forças giroscópicas (força de Coriolis). Quando a peça rotativa é movida para fora da posição com torção, são criadas forças giroscópicas. Daí o nome sensor de momento de guinada.
Devido à torção, um elemento piezoelétrico gera uma diferença de tensão que é medida pelo dispositivo de controle. A tensão gerada varia entre 0 e 5 volts. Na posição de repouso (quando nenhuma rotação é registrada) o sensor emite 2,5 volts.
Sensor de pressão do freio:
Sensores de pressão hidráulica separados também foram adicionados ao sistema de freios (em ambos os circuitos), o que pode ser visto nas imagens abaixo. Em carros mais antigos, esses sensores estão localizados nas linhas de freio. Hoje em dia, os sensores de pressão dos freios são normalmente integrados na unidade hidráulica do próprio sistema ABS. Esta unidade costuma ser visível sob o capô. Todas as linhas de freio hidráulico estão conectadas a isso.

