Tópicos:
- Introdução
- Princípio de funcionamento de motores elétricos
- Motor elétrico DC com escovas de carvão
- Motor elétrico DC sem escovas de carvão
Introdução:
Encontramos motores elétricos em cada vez mais lugares do carro. Num motor elétrico, uma corrente elétrica é convertida em movimento e calor. Encontramos um motor elétrico no ajuste dos retrovisores e bancos, mas também como motor do limpador de pára-brisa no mecanismo do limpador de pára-brisa ou como motor de partida. Esses motores elétricos operam com tensões de 12 a 14 volts. Nesta página limitamo-nos aos motores elétricos no interior e no exterior.
Os motores elétricos também fornecem propulsão (parcialmente) elétrica em veículos híbridos e totalmente elétricos. Este tipo de motor elétrico é discutido na página: Motores elétricos de alta tensão.
Podemos dividir os motores elétricos DC em:
- Motor elétrico com escovas de carvão (campo eletromagnético e armadura)
- Motores elétricos em série;
- Motores elétricos paralelos;
- Motores elétricos sem escova.
Princípio de funcionamento dos motores elétricos:
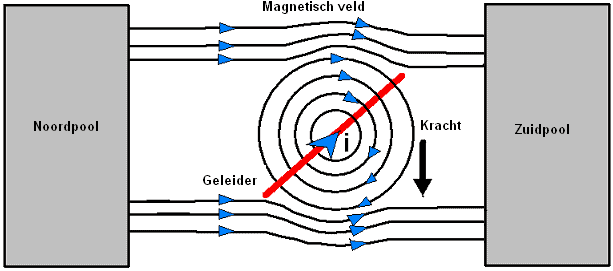
Num motor elétrico, uma corrente elétrica é convertida em um movimento rotativo. O movimento é causado por dois pólos magnéticos que se atraem ou se repelem:
- Um pólo norte e um pólo sul se atraem;
- Dois pólos norte se repelem;
- Dois pólos sul se repelem.
Um ímã tem um pólo norte e um pólo sul com cargas opostas. Quando esse ímã é quebrado ao meio, você não tem repentinamente dois pólos separados, mas dois novos ímãs, ambos com um pólo norte e um pólo sul.
Vários pólos magnéticos (norte e sul) são fixados na caixa. Existe um campo magnético entre os pólos norte e sul. O eixo de saída (a armadura) gira devido a mudanças no campo magnético.
Em um motor elétrico, dois pólos com o mesmo nome são constantemente colocados frente a frente usando (geralmente) ímãs permanentes, ou então eletroímãs. Como os pólos de mesmo nome se repelem, cria-se um movimento.
Motor elétrico DC com escovas de carvão:
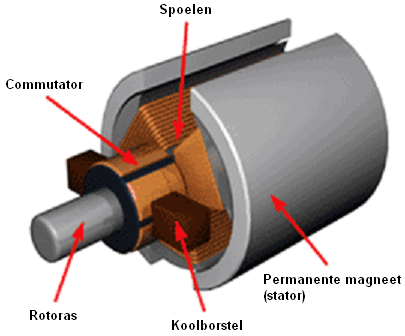
Quase todos os motores elétricos na tecnologia automotiva são projetados como motores CC com ímãs permanentes e escovas de carvão. Neste tipo de motores elétricos encontramos os seguintes ímãs:
- Ímãs permanentes (um pólo norte e um pólo sul): existe um campo magnético estacionário entre eles;
- Bobinas: um campo eletromagnético é gerado nelas. O campo eletromagnético rotativo é gerado nas bobinas.
Os ímãs permanentes estão localizados à esquerda e à direita do rotor e consistem em um pólo norte e um pólo sul. Entre este pólo norte e sul existe um campo magnético estacionário que não muda quando o motor elétrico está em operação ou parado.
Um campo eletromagnético rotativo é gerado nas bobinas assim que a corrente flui através delas. A corrente é fornecida e removida pelas escovas de carvão através do comutador.
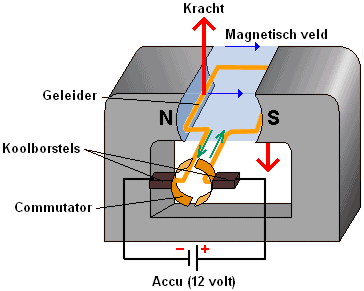
A inversão do sentido da corrente é feita por meio de comutação: duas escovas de carvão arrastam sobre o comutador, que consiste em um lado positivo e um lado negativo. A escova de carvão no lado positivo transporta a corrente para o condutor (setas verdes na figura). A corrente sai do condutor através da escova de carvão no lado negativo. A corrente que flui através do condutor cria um campo eletromagnético.
Uma força é criada entre o magnetismo resultante na armadura (o condutor) e o campo (os ímãs permanentes) (setas vermelhas na imagem). Esta força faz com que a armadura e o comutador girem em seu eixo. As escovas de carvão atingem então a outra parte do comutador, invertendo a direção da corrente na armadura. O campo magnético e a força são construídos na mesma direção, de modo que a armadura gira novamente em torno de seu eixo.
Podemos mudar o sentido de rotação do motor elétrico (leia-se: a armadura) invertendo o mais e o menos das escovas de carvão.
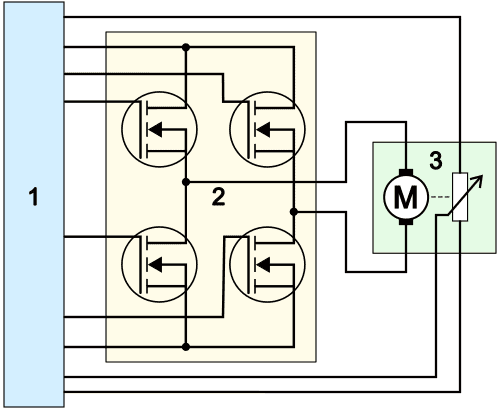
A troca de mais e menos pode ser feita por meio de uma ponte H.
- A ECU (1) controla simultaneamente dois dos quatro transistores ou FETs (4);
- Os FETs (2) dão ao motor elétrico (3) um sinal positivo e terra. Dependendo de quais dois FETs estão ligados, a escova de carbono superior é positiva e a inferior é retificada, ou vice-versa;
- O potenciômetro próximo ao motor elétrico registra a posição e o sentido de rotação. Nem todos os motores elétricos estão equipados com potenciômetro.
Veja a página Ponte H para os possíveis projetos e métodos de comutação da ponte H.
Motor elétrico DC sem escovas de carvão:
O motor de corrente contínua (CC) sem escova é um motor síncrono. O controle elétrico substituiu as escovas de carvão. Este tipo de motor elétrico é muito semelhante ao motor CA síncrono com ímãs permanentes, utilizado na trem de força de veículos elétricos. A principal diferença entre os dois motores é o controle: o motor CA é controlado com tensão alternada senoidal modulada e o motor CC com tensão de onda quadrada.
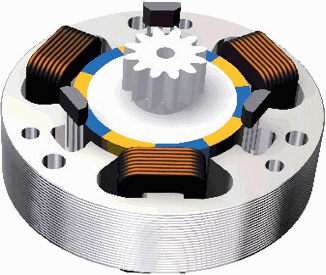
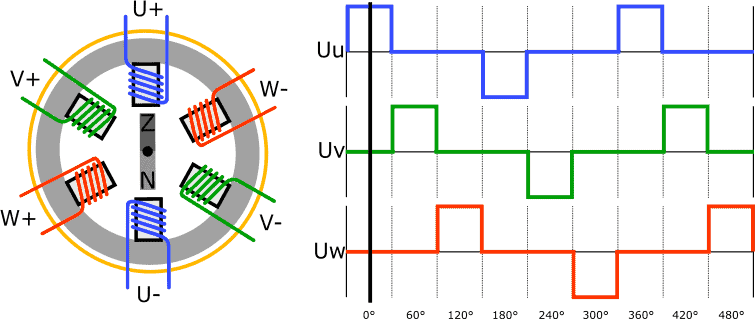
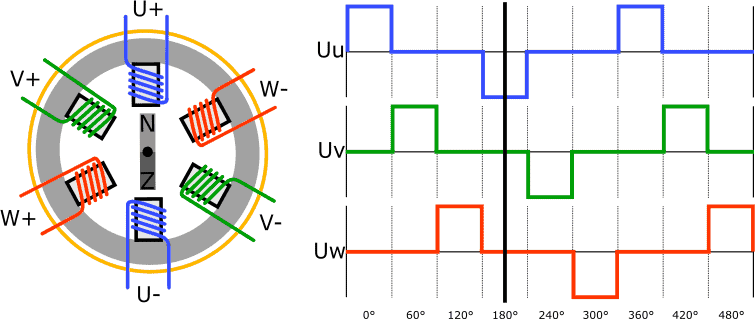
O estator geralmente contém três ou seis bobinas (U, V e W) e o rotor é um ímã permanente. A imagem abaixo mostra a estrutura esquemática do motor DC com a progressão da tensão através das três bobinas. Na realidade, vários sensores Hall são instalados entre os pólos para determinar a posição do rotor.
A unidade de controle determina quais bobinas deve controlar com base na posição do rotor.
Na imagem a seguir a bobina U+ está energizada. A forma como a bobina é enrolada em torno do pólo determina se será um pólo norte ou sul. Neste exemplo, o U+ é o pólo norte e o U- é o pólo sul.
O rotor é projetado como um ímã permanente. Conforme descrito nos parágrafos anteriores, o rotor se posiciona ou gira como resultado de uma mudança no campo magnético através das bobinas.
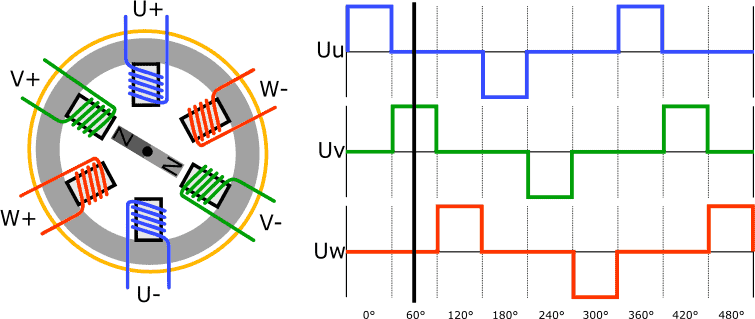
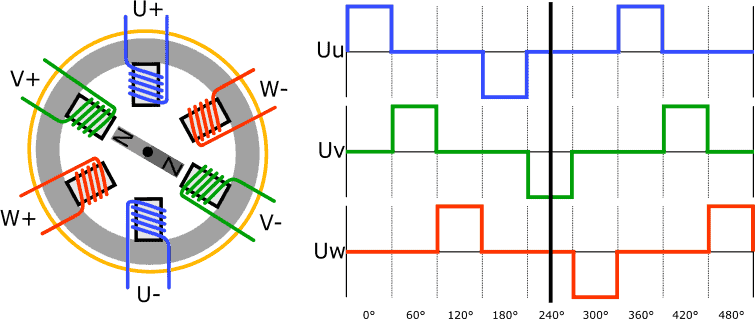
Para girar o rotor no sentido anti-horário a partir da posição mostrada na figura anterior, as bobinas em V são energizadas.
O V+ torna-se o pólo norte, V- o pólo sul. O rotor de ímã permanente gira;
os pólos norte e sul se atraem, assim como os pólos sul e norte do outro lado do ímã.
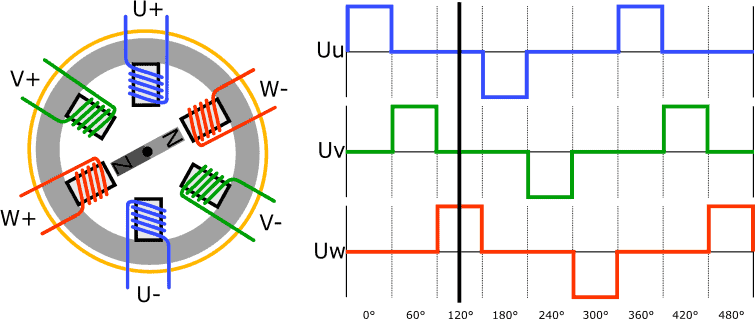
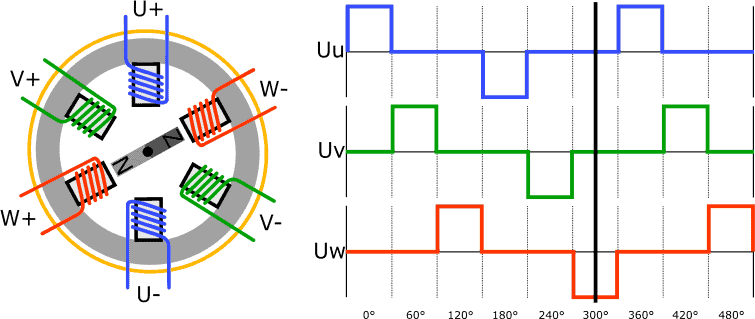
Agora as bobinas W são energizadas para girar o rotor mais 60 graus.
A bobina W+ torna-se um pólo norte e W- o pólo sul. O rotor gira e assume sua nova posição.
O rotor da próxima imagem girou 180 graus desde a primeira situação; na primeira imagem o pólo sul apontava para cima; agora esse é o Pólo Norte.
A polaridade da bobina U+ e da bobina U- é invertida, fazendo com que a corrente flua através das bobinas ao contrário. Isso torna o U+ um pólo sul e o U- um pólo norte.
O rotor com ímã permanente é girado ainda mais pela mudança no campo magnético.
Para girar o rotor 60 graus novamente, o V- é transformado em pólo norte e o V+ em pólo sul. O rotor assume a nova posição.
Mais uma vez o rotor gira 60 graus como resultado de uma mudança no campo magnético nas bobinas:
A bobina W- é o pólo norte e a bobina W+ é o pólo sul.
Nas seis situações descritas acima, duas bobinas estão constantemente energizadas ao mesmo tempo. Também encontramos frequentemente motores DC sem escovas com três bobinas em vez de seis. Com três bobinas, as bobinas U, V e W também são energizadas uma após a outra, mas não há alteração na polaridade.
O motor DC sem escovas é um motor potente adequado para aplicações onde é necessário alto torque para partida, velocidade média e alta velocidade. O motor DC sem escova e o motor de passo são frequentemente confundidos. Isto não é surpreendente, porque o funcionamento e o controle dos motores têm muitas semelhanças: ambos os motores são acionados criando um campo magnético entre as bobinas e o rotor com ímãs permanentes. Porém, além da terminologia, ambos os motores apresentam diferenças significativas, principalmente na aplicação e, portanto, na escolha dos materiais.
O motor de passo é basicamente um motor DC sem escovas, mas é aplicado em um campo diferente. Embora o motor CC seja usado principalmente para funcionamento de longo prazo em altas velocidades, vemos o motor de passo em aplicações onde um ajuste em uma posição exata é o mais importante.
O motor DC mostrado é controlado a cada rotação de 60° do rotor. Isso possivelmente poderia ser reduzido para 30° se energizarmos quatro bobinas simultaneamente entre cada controle, obtendo assim uma posição intermediária. No entanto, um motor de passo é capaz de ajustar incrementos de 1,8° a 0,9°. Isto mostra ainda que o motor de passo é adequado para posições muito precisas.
As diferentes versões, os métodos de controle da ECU e as aplicações podem ser encontrados na página motor de passo.
