Emner:
- Algemeen
- Vindusviskermotordeler
- Koble til viskermotoren
- Vindusviskermotor pluss slått
- Fra teori til produsentens opplegg
- To-trinns viskermotor
- LIN bussstyrt viskermotor
generelle:
Viskermotoren bak er montert i bakluken på bilen. Det er et hull i vinduet eller i platemetallet på bakluken som viskermotorakselen stikker ut gjennom. Viskerarmen med viskerbladet er montert på denne akselen. Akselen kan åpenbart ikke gjøre hele rotasjoner, for da tørkes ikke bare bakruten, men også resten av bakluken eller bakstøtfangeren ren av vindusviskerbladet. Derfor er det en mekanisme i motoren som sørger for at akselen kan bevege seg opptil 180 grader.

Viskermotoren bak har alltid én hastighet. Vindusviskerbryteren kan slås av og på, og det er vanligvis et intervall; Etter innkobling vil motoren kontrolleres med noen sekunders mellomrom.
Vindusviskeren går alltid tilbake til utgangsposisjonen etter at den er slått av. Hvis dette ikke skulle skje, ville viskerarmen stoppet halvveis over vinduet når bryteren ble satt til "av"-posisjon. I stedet for at motorens strømforsyning blir slått av, forblir den på til nullpunktet er nådd.
Vindusviskermotordeler:
For å la vindusviskerarmen bevege seg tilbake til utgangsposisjonen, inneholder den en intern kontaktplate med glidekontakter. Følgende bilder forklarer hvordan viskermotoren fungerer.
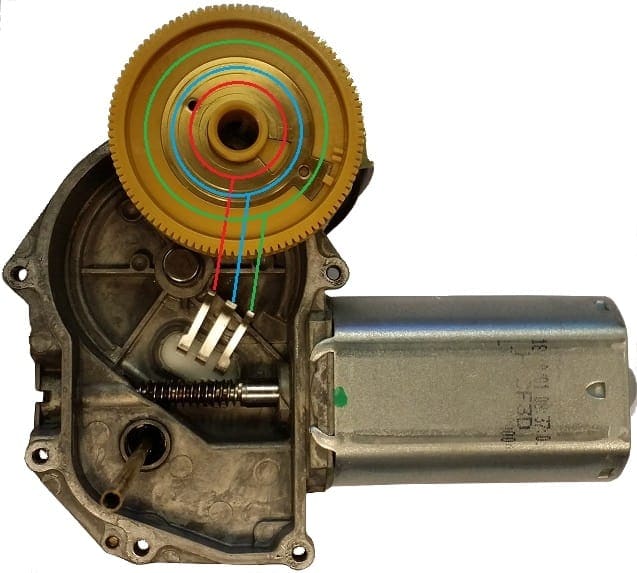
Bakplaten til vindusviskermotoren er fjernet. Den røde pilen indikerer hvor den runde kammen til mekanismen i bakplaten beveger seg frem og tilbake. Mekanismen sørger for at rotasjonsbevegelsen til det gule plastgiret omdannes til en frem og tilbake bevegelse av utgående aksel. Utgangsakselen er oppreist på figuren. Vindusviskerarmen er montert på denne akselen.

Bildet til høyre viser den utskårne viskermotoren med snekkegiret og plastgiret. Her er mekanismen demontert.

Følgende tekst er relatert til bildet nedenfor. Det gule plastgiret er nå snudd. Hakkene og utsparingene til den ledende kontaktskiven er godt synlige her. Rødt, blått og grønt indikerer i hvilken posisjon glidekontaktene berører kontaktplaten.
For å gi innsikt i posisjonene der glidekontaktene kommer i kontakt med den ledende kontaktplaten, er disse angitt i fargene rød, blå og grønn. Nedenfor er hva skyvekontaktene er for:
Rød: Denne viser alltid 12 volt når tenningen er slått på.
Blå: Denne glidekontakten er ansvarlig for nullposisjonen.
Grønn: Dette er massen. Motoren er koblet til denne i nullstilling.
De tre glidekontaktene "drar" over den gullfargede kontaktplaten når motoren går. Det er laget et hakk og en utsparing i kontaktplaten. Skyvekontaktene berører derfor aldri kontaktplaten samtidig. Den midterste (angitt i blått) er ansvarlig for bevegelsen til nullposisjonen. Kontaktplaten er ledende; Hvis motoren ennå ikke er i utgangsposisjon, er de indre (røde) og de midtre (blå) glidekontaktene koblet til hverandre. Spenningen overføres fra den røde til den blå kontakten via kontaktplaten. Dette lar motoren fortsette å gå til den røde glidekontakten når hakket. I det øyeblikket kan den ikke lenger overføre spenning til den blå. Styringen av motoren har stoppet.
Samtidig får den ytre glidekontakten kontakt med den blå glidekontakten via utsparingen (angitt med grønt) via kontaktplaten. Den grønne glidekontakten er koblet til kjøretøyets jord. Denne glidekontakten fungerer som en slags brems. Dette bringer vindusviskermotoren til å stoppe. Massen føres videre til blått via grønt. Motoren er kortsluttet til jord på begge sider og forblir derfor i nullstilling.
Koble til viskermotoren:
For å koble til ledningene til vindusviskermotoren må virkemåten til blant annet kontaktplaten og glidekontaktene studeres. Først når du forstår på hvilke punkter spenninger vil være til stede, kan du fortsette å måle og koble ledningene.
Ledningsnettet i bakluken til viskermotoren bak består ofte av tre eller fire ledninger. En konstant spenning, svitsjet spenning og en jord må måles på disse ledningene. Den gjenværende ledningen, som ingenting måles på, har ofte en forsyningsspenning (når det er en jordkoblet motor) eller en positiv (ved en plusssvitsjet motor) når motoren er i hvileposisjon. En måling kan kun utføres på denne ledningen når alle ledningene er tilkoblet og viskermotoren er i startposisjon. I alle andre tilfeller måles ingenting.
Det finnes pluss- og jord-tilkoblede vindusviskermotorer. Dette betyr at bryteren er plassert på pluss- eller jordsiden av elmotoren. Dette er veldig viktig å vite før du måler. Kapitlene nedenfor beskriver hvert trinn i detalj. Vær oppmerksom på forskjellene mellom pluss- og bakkevariantene!
Vindusviskermotor positiv:
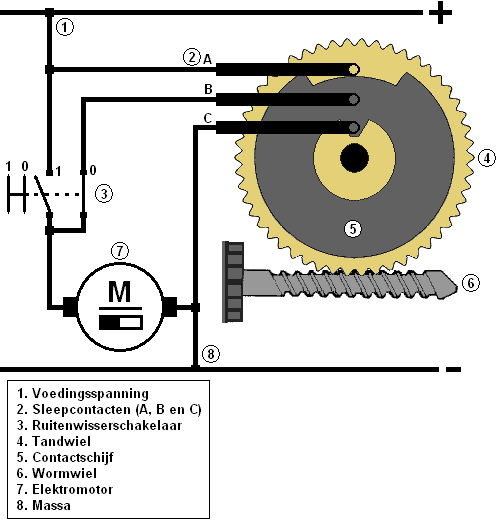
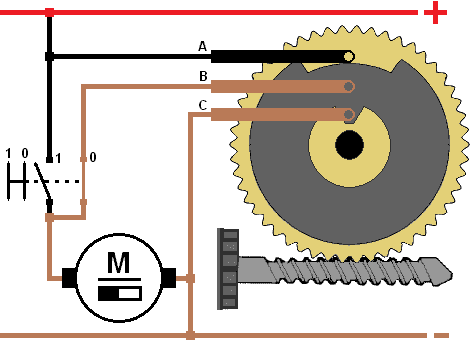
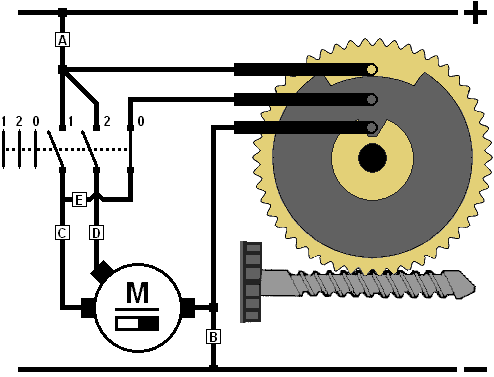
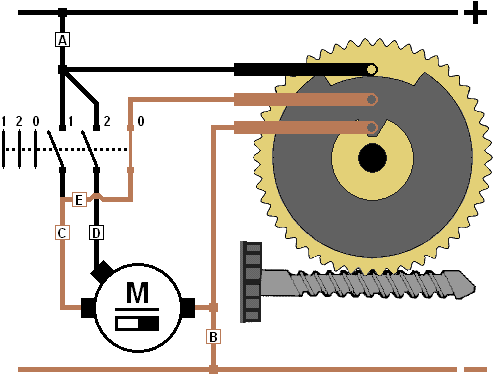
Diagrammene kan også brukes til å bestemme hvordan dette skal henge sammen med for eksempel den beryktede delen av praktisk eksamen. Nedenfor er et diagram med en forklaring av den plusssvitsjede bakre viskermotoren. Viskermotoren stoppes og bryteren "0" er lukket.
Den elektriske motoren (7) mottar kun direkte batterispenning ved konstant hastighet. I så fall er bryter 1 lukket og bryter 0 åpen. Den elektriske motoren (7) driver snekkegiret (6), som igjen roterer giret (4). Den grå ledende kontaktskiven er festet til plastgiret og vil derfor også rotere. Når vindusviskerbryteren er satt til av-posisjon, sørger kontaktskiven (5) og glidekontaktene A, B og C (2) for at motoren står stille i riktig posisjon. Dette er avklart nedenfor.
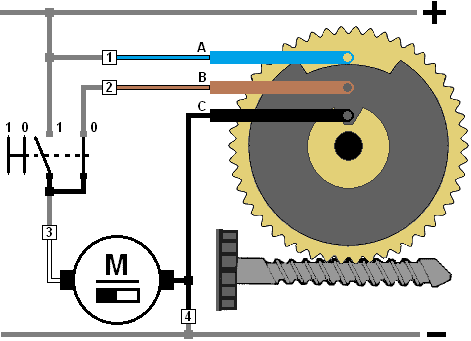
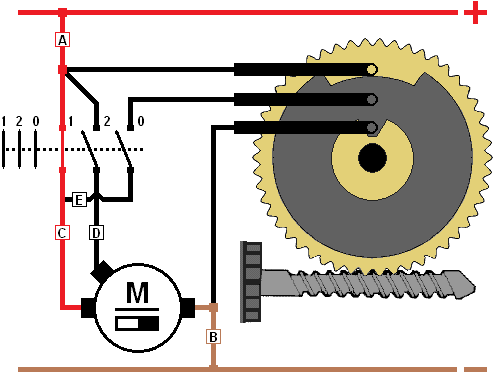
Vindusviskermotor slått på:
I denne situasjonen er viskermotoren slått på. Forsyningsspenningen tilføres via den røde positive ledningen. Bryter 1 er lukket, og gir motoren en konstant forsyningsspenning. Den andre siden av motoren er koblet til jord, slik at motoren vil rotere med konstant hastighet. Snekkegiret drives av vindusviskermotoren og vil derfor rotere. I dette tilfellet har dette ingen innvirkning på spenningsforsyningen til motoren.
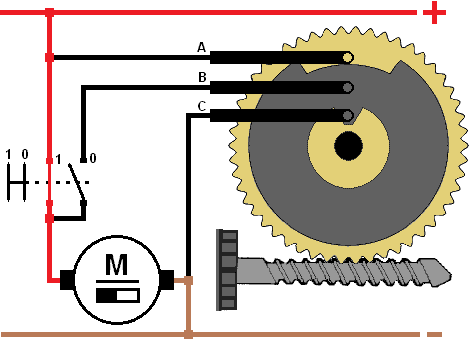
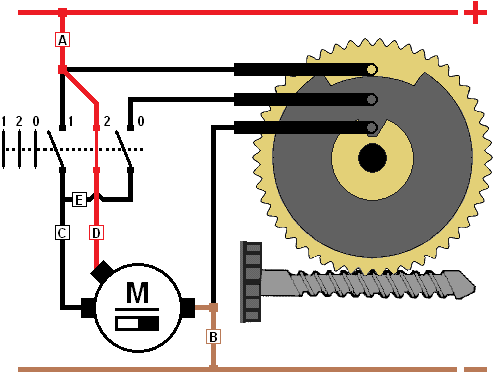
Bryter i av-posisjon, vindusvisker fortsatt i bevegelse:
På bildet nedenfor er vindusviskerbryteren satt til "av"-posisjon. Dette betyr at bryter 1 åpnes og bryter 0 (fra nullstilling) lukkes. I dette øyeblikket går det en strøm via glidekontakt A, via den grå kontaktplaten til glidekontakt B. Strømmen går deretter fra skyvekontakt B, via bryter 0 til viskermotoren. Fordi giret drives av viskermotoren via snekkegiret, vil også kontaktplaten rotere. Inntil hakkene på kontaktplaten kommer tilbake til toppen, vil motoren fortsette å gå.
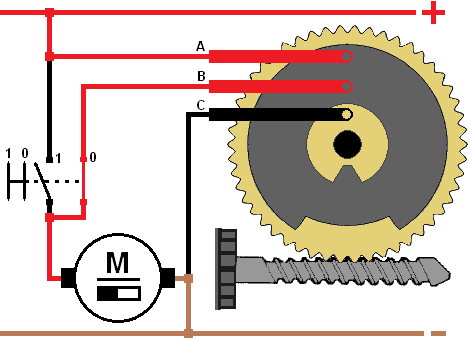
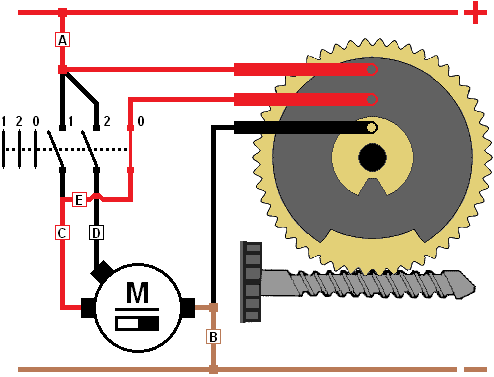
Bryter i av-posisjon; vindusvisker stopper:
Tannhjulet fortsetter å rotere til hakkene på kontaktplaten er på toppen. Dette avbryter kontakten mellom skyvekontaktene A og B. Viskerkontakt A er isolert av det (gule) plastgiret, slik at det ikke kan gå mer strøm til glidekontakt B. Det vil derfor ikke lenger gå strøm til viskermotoren. Når kontaktplaten er dreid langt nok, får glidekontakt C også kontakt med den lille ledende delen av kontaktplaten. I dette øyeblikk er glidekontaktene B og C forbundet med hverandre. Fordi C alltid er koblet til jord, får B nå også jordkontakt via kontaktplaten. Vindusviskermotoren er foreløpig koblet til jord på begge sider, slik at den umiddelbart står stille. Så dette fungerer faktisk som en slags brems. På denne måten stopper viskermotoren alltid på samme sted.
Animasjon:
Denne animasjonen viser tydelig de forskjellige posisjonene til bryteren og kontaktplaten. Her er en kort oppsummering av forklaringen ovenfor.
- slått av: bryteren er i nullstilling og den elektriske motoren er kortsluttet med pluss og jord.
- slått på, konstant hastighet: bryteren er i posisjon 1 og kontaktplaten gjør to omdreininger med klokken. I denne posisjonen brukes ikke kontaktplaten.
- Bryterposisjon 0, dreier til nullstilling: kontaktskiven gir strømforsyning til motoren til hakkene har nådd glidekontaktene.
- AB (pluss avbrutt), BC ta kontakt. Dette virker bremsende på motoren, som da stopper nesten umiddelbart.

For eksempel når kabling skal kobles til under en praktisk eksamen, må de riktige bryterposisjonene finnes. Med diagrammet over viskermotoren kan du lese hvilken pinne i pluggen som er ansvarlig for strømforsyningen, jord eller nullposisjonen. Ved å måle i bilens ledningsnett hvilken ledning som har 12 Volt på, kan den allerede kobles til. Ved hjelp av en motstandsmåling kan det bestemmes hvilken forbindelse som er jordingen. Ohmmeteret vil indikere en motstandsverdi på mindre enn 1 Ohm ved denne tilkoblingen. Den negative ledningen må selvfølgelig holdes på et godt jordingspunkt på karosseriet. Ved å flytte bryteren til flere posisjoner, kan du finne hvilken ledning som hører til hvilken posisjon på bryteren. Diagrammet kan da brukes til å bestemme hvilke ledninger som skal kobles til hverandre.
Fra teori til produsentens skjema:
Teorien om den bakre viskermotoren ble diskutert i forrige avsnitt. Diagrammene viser tydelig hvordan kontaktplaten i den kuttede viskermotoren sørger for at motoren får spenning for å rotere tilbake til startposisjonen. Denne delen forklarer hvordan dette diagrammet kan oversettes til et produsentdiagram.
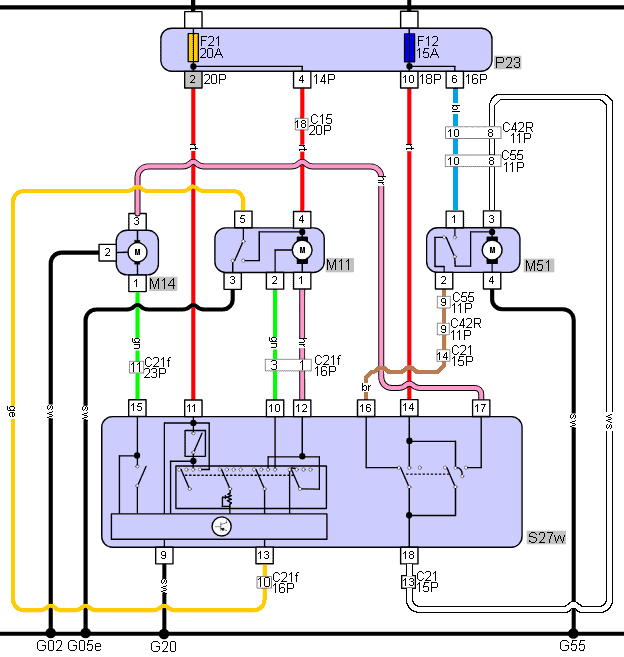
Under elektrisk diagram er basert på den bakre viskermotoren til en Hyundai Getz. Ledningsfargene (blå, brun, hvit og svart) tilsvarer fargene på bilen.
Nummer 1 til 4 i diagrammet til høyre og nedenfor viser pinnene til kontakten som kobler vindusviskermotoren til bilens ledningsnett. Tallene og ledningsfargene i begge diagrammene stemmer overens. Diagrammet nedenfor er hentet fra HGS-data.com. Viskermotoren bak har komponentkoden: M51.
I begge diagrammene kan du se at den blå ledningen (pinne 1 i pluggen) er den konstante positive ledningen fra sikringen. Den brune ledningen (pinne 2) er ansvarlig for å gå tilbake til nullposisjon. Diagrammet under viser kontaktplaten som en mekanisk bryter. Den svitsjede positive ledningen fra bryteren er koblet til den hvite ledningen (pin 3). Den svarte ledningen er jordledningen (pinne 4) og er koblet til et jordingspunkt på huset (G55).
I hvilestilling er den elektriske motoren kortsluttet til jord; de hvite og brune ledningene kobles til hverandre via kontaktskiven.
To-trinns viskermotor:
Foreløpig har det kun vært snakk om entrinns viskermotor. Denne passer for bakvinduet. Vindusviskermotoren kan ofte kjøre med to forskjellige hastigheter, nemlig normalhastigheten som brukes for både intermitterende (første posisjon av bryteren) og kontinuerlig visker (andre posisjon) og høy hastighet (den tredje posisjon). Det er derfor en forskjell i hastighet mellom den andre og tredje posisjonen til vindusviskerbryteren der den elektriske motoren roterer. Dette oppnås ved å bruke flere kullbørster. En-trinns viskermotoren har to kullbørster, to-trinns viskermotoren har tre. Figuren til høyre viser symbolene for en enkelt- og tohastighets viskermotor.
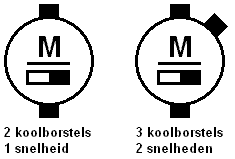
Ved høyere hastighet slås færre armaturviklinger på. Motspenningen som genereres ved å rotere ankeret er nå mindre. Fordi det genereres mindre motspenning, går ankeret, og til slutt hele den elektriske motoren, med høyere hastighet.
To-trinns viskermotordiagrammet er veldig likt det som er diskutert ovenfor. Vindusviskermotoren slås på igjen her.
Det er nå tre posisjoner av bryteren synlige.
– Posisjon 1: lav hastighet, konstant rotasjon.
– Posisjon 2: høy hastighet, konstant rotasjon.
– Posisjon 0: slå av, vri tilbake til startposisjon (nullstilling).
I diagrammet til høyre er den første posisjonen aktivert. Dette er den lave hastigheten.
Mode 2 er aktivert her. Nå får motoren pluss via en annen kullbørste. Det er nå lavere motspenning i den elektriske motoren, noe som gjør at hastigheten blir høyere enn da den andre kullbørsten ble koblet til.
I denne planen er posisjon 0 valgt. Motoren er slått av, men går først tilbake til startposisjon. Kontaktplaten forbinder glidekontaktene A og B, slik at viskermotoren fortsatt har forsyningsspenning. Når kontaktplaten roteres 180 grader videre, avbrytes kontakten mellom glidekontaktene A og B, noe som fører til at forsyningsspenningen svikter.
Betjeningen av kontaktplaten og glidekontaktene er den samme som med 1-trinns viskermotor.
I denne situasjonen er kontaktplaten rotert igjen, slik at glidekontaktene B og C nå kommer i kontakt med hverandre. Motoren er nå jordet på begge sider. Viskermotoren forblir i denne posisjonen til den slås på igjen.
LIN bussstyrt viskermotor:
De tidligere nevnte systemene bruker spenningskontroller fra vindusviskerbryteren. Moderne biler bruker i økende grad kontroll via LIN-buss. Kontrollenheten styrer vindusviskermotoren. Flere innganger, fra både bryteren (S) og regn-/lyssensoren (RLS) gir et signal til ECU-en om å slå på vindusviskermotoren (RWM), tørke med en annen hastighet eller slå av.
Diagrammet viser komponentene som styrer vindusviskermotoren.
Bryteren (S) er koblet til ECU med de tre grønne ledningene. Posisjonen til bryteren overføres via disse ledningene.
Bryteren har derfor ingen direkte forbindelse til RWM, slik tilfellet var med den konvensjonelle kontrollen. RLS mottar strøm fra ECU (12 volt), får jording via et jordingspunkt og overfører signalet via LIN-bussledningen til de andre tilkoblede komponentene. RWM styres av et signal på LIN-bussen. Kontrollenheten i RWM (gjenkjennelig på transistorskiltet) sørger for selve styringen av den elektriske motoren.

I den konvensjonelle vindusviskermotoren forårsaket posisjonen til den ledende kontaktplaten bevegelsen til nullposisjonen. Med en LIN-bussstyrt viskermotor er denne kontaktplaten erstattet av en posisjonsskive og Hall-sensorer. Posisjonen til posisjonsskiven avhenger av plastgirets posisjon, og derfor av posisjonen til viskerarmen. Posisjonsskiven er delt inn i en rekke nord- og sørpoler (N for nord og S for sør). Fordi hver nord- og sørpol på posisjonsskiven har forskjellig størrelse, kan kontrollenheten i RWM bestemme den nøyaktige posisjonen til giret ved hjelp av Hall-sensorene. Når RLS eller bryteren avslutter kontrollen av vindusviskermotoren, styrer styreenheten i RWM den elektriske motoren til posisjonsskiven har nådd "nullposisjon".
Fordelene med denne kontrollen er:
- PWM-kontroll gjør det mulig å kjøre forskjellige hastigheter.
- Rotasjonsretningen til den elektriske motoren kan reverseres; når du dreier med klokken, beveger viskerarmene seg opp og når du dreier mot klokken, beveger viskerarmene seg ned. Dette gir mulighet for mindre installasjonsplass for vindusviskermekanismen.
- Nullposisjonen kan variere; ved noen ganger å flytte viskerbladene opp bare litt, vipper gummien på viskerbladet i den andre retningen. Vindusviskerbladet har ikke alltid samme posisjon på frontruten. Dette har en positiv innvirkning på levetiden til viskerbladet.
LIN-busssignalet kan måles med et oscilloskop. Det viste omfangsbildet viser kommunikasjonen mellom ECU (masteren) og regn-/lyssensoren og viskermotoren (slavene).

På siden LIN buss strukturen til en LIN-bussmelding er beskrevet. Kommunikasjonen av vindusviskersystemet er også beskrevet i detalj og det forklares hvordan feil i LIN-busssignalet kan gjenkjennes.