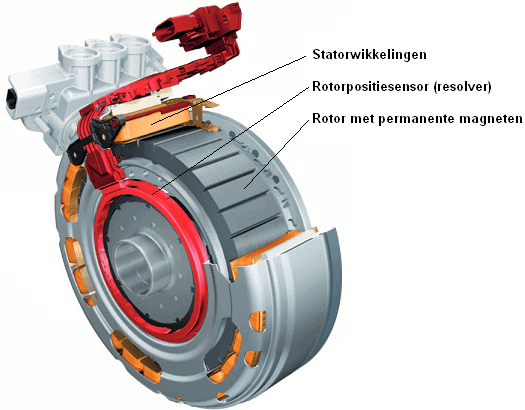
Forord: For driften av synkron elektrisk motor det er viktig at riktig spyling gjennom omvendt er kontrollert. For å bestemme hvilken spole (U, V eller W) som skal aktiveres, leser inverterens ECU posisjonen til rotoren, som måles av rotorposisjonssensoren, også kalt "resolver".
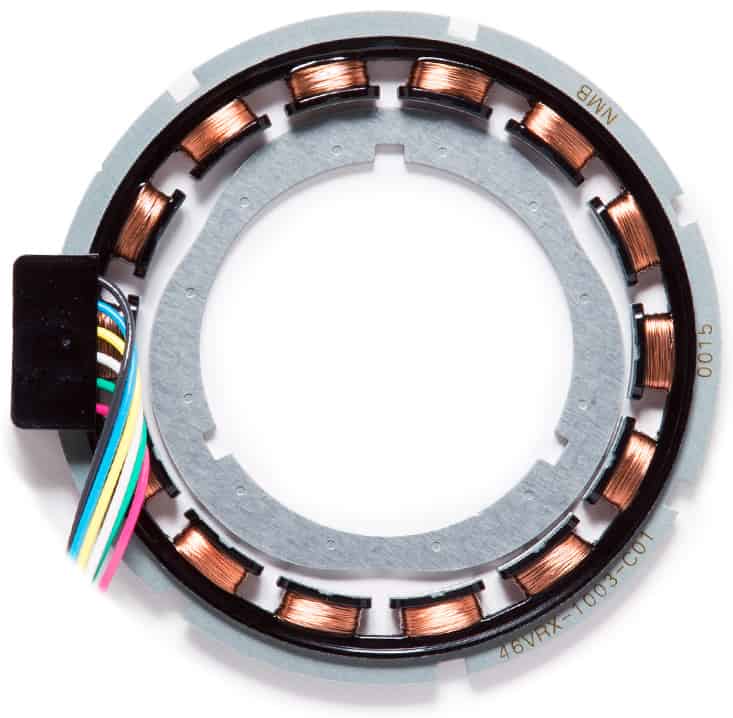
Resolveren består av en ytre ring med et antall spoler på innsiden av en roterende eksentrisk plate. Avstanden mellom den eksentriske platen og spolene endres hele tiden ettersom den roterer.
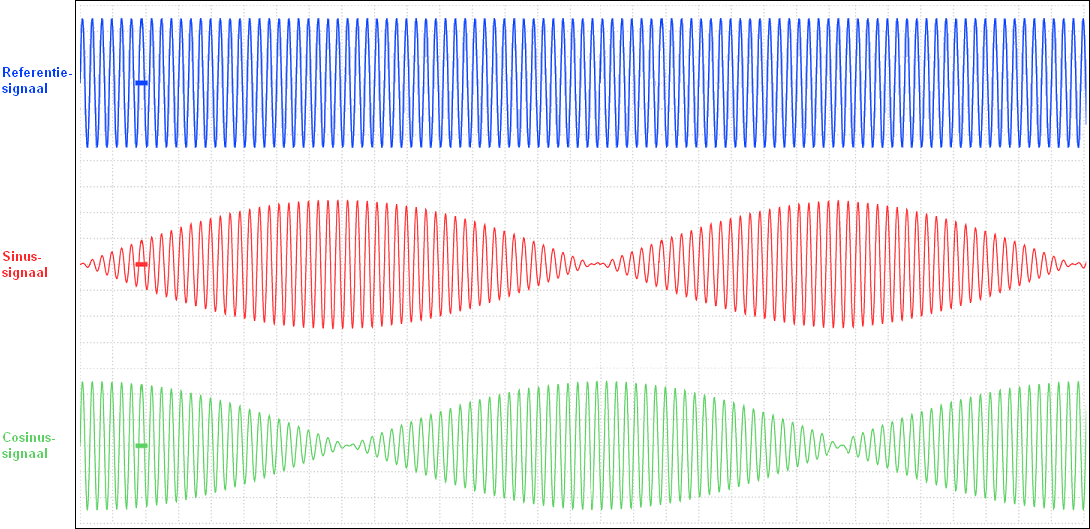
Signaler fra resolveren: ECUen gir resolveren et referansesignal. Luftgapet mellom en spole og eksentrikken skaper en høy eller lav sinusformet vekselspenning. Med høy amplitude i det røde eller grønne sinusformede signalet (se figuren under) er luftgapet mellom eksentrikken og spolen liten.
Resolveren fungerer både når den står stille og mens den elektriske motoren går: i begge tilfeller må ECU vite i hvilken posisjon rotoren er. Bildet nedenfor viser de teoretiske signalene. I virkeligheten er frekvensen mye høyere, så variasjonen i amplituden til sinus- og cosinussignalene er godt synlig.
De to bildene nedenfor viser en faktisk måling på en resolver. Også her ser vi referansesignalet øverst, og sinus- og cosinussignalene under. Det første bildet står stille: den elektriske motoren går ikke. Høyden på sinussignalet og cosinussignalet forblir konstant. Basert på nivået på denne vekselspenningen, vet ECU hvor rotoren er når den står stille.
Resolver signaliserer ved stillstand
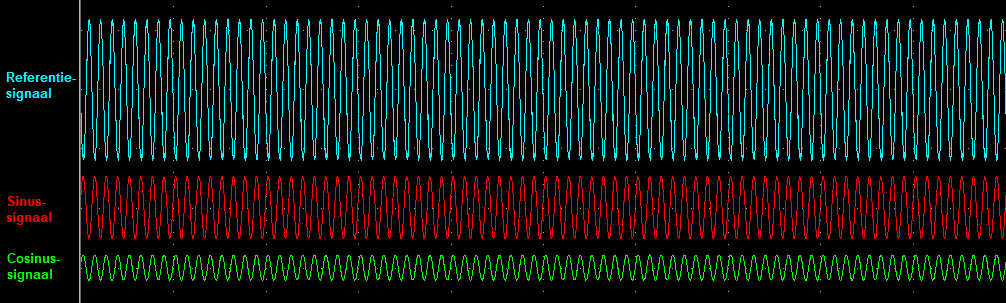
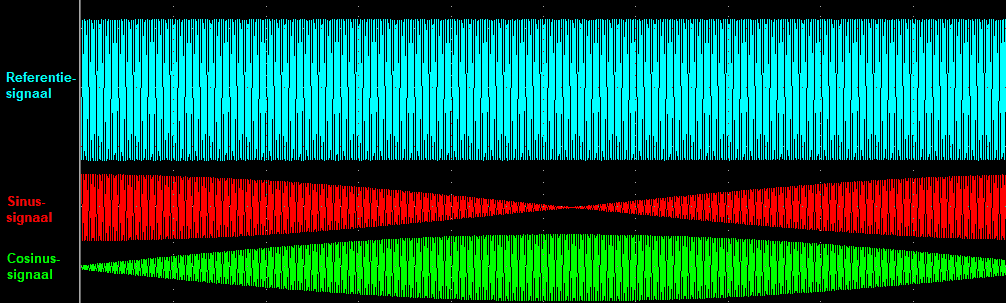
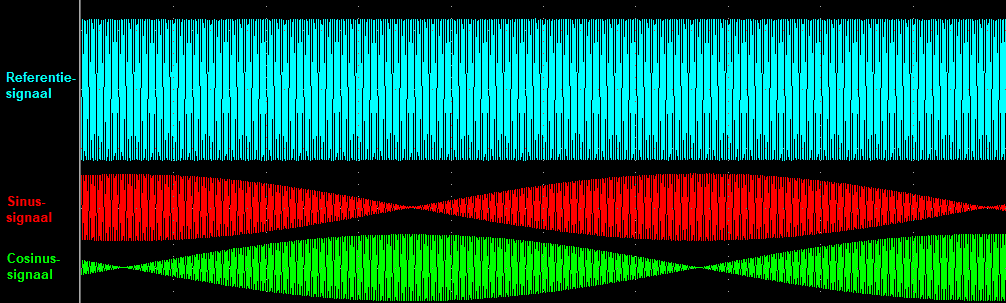
I de neste to bildene er tiden per divisjon redusert. Frekvensen til referansesignalet på resolveren er uendret, men målt over en større tidsperiode i målingen. Som et resultat ser vi at amplitudene til sinus- og cosinussignalene endres tydelig. Det første bildet ble målt ved lav rotorhastighet og det andre ved økt hastighet. Når hastigheten øker, øker frekvensen til sinus- og cosinussignalene (flere signaler per tidsenhet), men amplituden (nivået på vekselspenningen) forblir konstant.
Løsningssignaler: lav hastighet
Løsningssignaler: hastighet økt
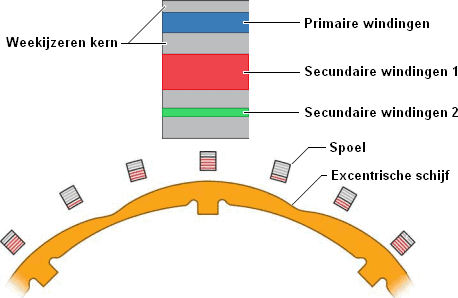
Komponenter i resolveren: Resolveren til VW E-Golf inneholder 30 spoler koblet i serie. Hver spole i resolveren består av en myk jernkjerne med tre forskjellige viklinger: primær, sekundær 1 og sekundær 2.
Primærspolen (blå) leveres med høyfrekvent vekselspenning.
Antall sekundære omdreininger (1 rød, 2 grønne) er forskjellig på hver spole.
Når kammen til den eksentriske platen beveger seg langs spolen, forsterkes induktansen i sekundærviklingene. På grunn av antall vindinger av sekundærviklingene 1 og 2 i hver spole, resulterer dette også i de forskjellige spenningene i sekundærviklingene. ECU-en i omformeren kan beregne rotorens posisjon basert på spenningene til sekundærviklingene 1 og 2.
Justeringen av resolveren på rotoren er veldig presis: mange produsenter foreskriver at hele den elektriske motoren må skiftes ut hvis det oppstår problemer med resolveren. Etter (ved et uhell) demontering av resolveren, eller løsnet boltene på utsiden av elektromotorhuset, kan resolveren ikke lenger monteres riktig igjen. Også i dette tilfellet foreskriver mange produsenter å bytte ut den elektriske motoren.
Den nøyaktige rotorposisjonen til en synkron motor må være kjent ved stillestående og under kjøring. Hvis sensoren er defekt, kan kjøretøyet ikke lenger kjøre.
Fra asynkron motor på den annen side er ingen overvåking av rotorposisjonen nødvendig. Rotorposisjonssensoren sender ut fire pulser per rotoromdreining. Denne målingen overvåker den maksimale mengden slip mellom det roterende magnetfeltet mellom statoren og rotoren. Hall-sensoren brukes ofte som sensor. Hall-sensoren sender pulser til ECU når rotoren snur, men kan ikke utføre en måling ved stillstand, i motsetning til resolveren til synkronmotoren. Produsenter velger også noen ganger å bruke resolveren til synkronmotoren som en rotorposisjonssensor.