Emner:
- Bestem og installer sensorer for motorstyringssystemet
- Veivakselposisjonssensor
- Pulshjul
- Kartsensor
- Kjølevæsketemperatursensor
- Lambdasonde
Bestem og installer sensorer for motorstyringssystemet:
Motorstyringssystemet krever en rekke sensorer. Sensorer fungerer som "inngang" til systemet. Sensorer konverterer en fysisk mengde til et elektrisk signal som kan behandles av en datamaskin, i dette tilfellet MegaSquirt.
Monteringsprosessen til MegaSquirt må ta hensyn til komponentene som skal monteres på motoren, fordi strukturen til MegaSquirt kan variere.
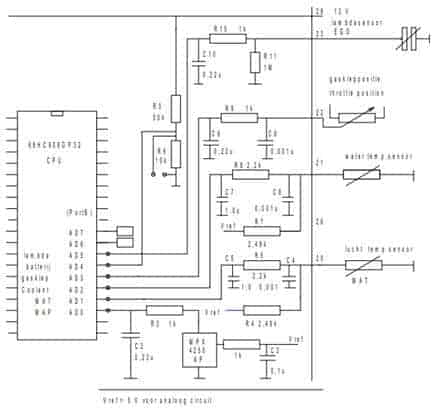
Figuren viser de forskjellige sensorkretsene som disse komponentene er plassert i. Inngangssignalene vist på figuren kommer fra lambdasensoren, gassposisjonssensoren, kjølevæsketemperatursensoren og lufttemperatursensoren.
I tillegg til sensorene inneholder diagrammet også en rekke motstander og kondensatorer. Sammensetningen av disse komponentene danner filtre; Disse filtrene tjener til å fange opp interferenssignaler og støy. Dersom sensorsignalet forvrenges av støy, kan dette få store konsekvenser for styringen av aktuatorene, og dermed også for motorens funksjon.
Veivakselposisjonssensor:
En viktig inngang for motorstyringssystemet er veivakselhastigheten.
Veivakselhastigheten måles ved hjelp av en veivakselposisjonssensor og et pulshjul. Veivakselposisjonssensoren har to viktige funksjoner:
- Veivakselhastigheten kan bestemmes basert på frekvensen til signalet;
- Den manglende tannen i pulshjulet indikerer veivakselposisjonen der stemplene til sylinder 1 og 4 er noen få grader før TDC.
Motorturtallet påvirker kontrollen av injektorene og tenningen. Den manglende tannen i 36-1 pulshjulet er viktig for å bestemme tennings- og injeksjonstidene. Det ble besluttet å bruke en Hall-sensor og ikke induksjonspulsgeneratoren som hastighetssensor. En induktiv sensor genererer en vekselspenning som må konverteres til en likespenning i MegaSquirt-kontrolleren. En Hall-sensor genererer en firkantbølgespenning, som forsterkes til en spenning på 5 eller 12 volt med en intern eller ekstern pull-up motstand. Dette gjør Hall-sensoren mer egnet for å danne et pålitelig signal. Dette valget må gjøres på forhånd før montering av MegaSquirt; begge sensorene krever en annen kretskonstruksjon.
Pulshjul:
Veivakselposisjonssensoren måler en endring i luftgapet til et pulshjul montert på motoren. Land Rover-motoren har imidlertid ikke opprinnelig en veivakselposisjonssensor og derfor ikke noe pulshjul. Pulshjulet måtte derfor monteres i etterkant. Mye tanke har gått på plasseringen og plasseringen av pulshjulet. Mulighetene var:
- En skive med 36 tenner som festes på utsiden av veivakselskiven ved hjelp av en klemme eller boltforbindelse.
- Justering av gjeldende veivakselremskive ved å frese tenner fra remskiven.
Det er vanlig å bruke et 36-1 eller et 60-2 pulshjul. 60-tanns pulshjulet brukes hovedsakelig til større diametre. 36-1 er egnet for bruk på grunn av tannbredden. Det er svært viktig at pulshjulet har så liten høydevandring som mulig. En høydeendring betyr en endring i magnetfeltet mellom sensoren og tennene på pulshjulet. Dette kan ha uheldige konsekvenser for driften av motoren. Dette må selvsagt forhindres. Justering av den aktuelle veivakselskiven var derfor å foretrekke. Ytterkanten av den eksisterende veivakselskiven er bearbeidet på en fresemaskin. Hakk er laget ved å fjerne materiale. De resterende 36 tennene gjør det mulig for sensoren å måle endringene i magnetfeltene. En tann er slipt bort for referansepunktet. Bildet nedenfor viser den maskinerte veivakselskiven.
Den jordede tannen er synlig på toppen av pulshjulet, rett under sensoren. Når veivakselen er i denne posisjonen betyr det ikke at stemplene til sylinder 1 og 4 er på TDC, men at disse stemplene er 90 grader før TDC, som tilsvarer 9 tenner (360/36). I det øyeblikket den manglende tannen passerer, mottar MegaSquirt et signal om at tenning bør skje snart. Fra det tidspunktet beregnes det når tennspolen skal aktiveres. Ved varierende driftsforhold bestemmes også fortenningstidspunktet ut fra dette referansepunktet.

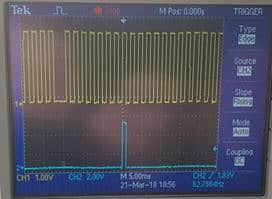
Bildet fra oscilloskopet (se bilde) viser veivakselsignalet (øverst) sammenlignet med tenningsspolens styresignal (nederst). Styrepulsen til tennspolen dannes ved den åttende tannen etter den manglende. Når motoren går på tomgang, forskyves tenningen 10 grader, noe som utgjør 1 tann. Dette tilsvarer 90 grader (9 tenner) mellom den fjernede tannen og det faktiske øverste dødpunktet.
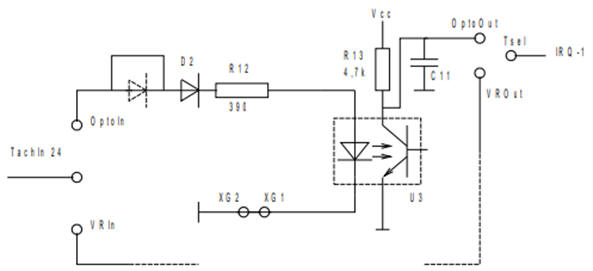
For å montere Hall-sensorkretsen i MegaSquirt må kondensator C11, motstand R12 og R13, diode D2 og optokobler U3 installeres (se figuren nedenfor). Signalet fra Hall-sensoren kommer inn i diagrammet i figur 105 under "Opto in". Signalet kommer til den såkalte optokobleren via dioden og motstanden. Denne komponenten er indikert med en stiplet linje. Optokobleren er en liten integrert krets der lysdioden på venstre side leder fototransistoren på høyre side når den lyser. Optokoblingen kan sees på som en bryter uten mekaniske eller elektriske forbindelser mellom kontroll- og bryterdelen.
Når transistoren i optokobleren er ledende, kan det flyte en liten strøm fra Vcc til jord. I det øyeblikket er det en spenning på 0 volt på "Opto Out". Hvis transistoren ikke er ledende, er det ingen strøm og derfor ikke noe spenningsfall over motstand R13. Spenningen på "Opto out" er da 5 volt.
Ved å bruke en optokobler lages det et galvanisk skille mellom dioden og fototransistoren. Farlige interferensspenninger holdes dermed utenfor mikrokontrollerkretsen, da nedbrytningsspenningen vanligvis er større enn 5 kV.
KART sensor:
En MAP-sensor (Manifold Absolute Pressure-sensor) måler trykket i inntaksmanifolden. MegaSquirt bruker dette trykket, motorhastigheten og innløpstemperaturen for å beregne mengden luft som kommer inn i motoren. Med Land Rover-motoren vil et absolutt trykk (lufttrykket utenfor) eller undertrykk bli målt. Dette er en naturlig aspirert motor som suger inn sin egen luft. Motorer utstyrt med turbo må takle overtrykk i inntaksmanifolden. Måleområdet til en MAP-sensor er vanligvis mellom 0,2 og 1.1 bar.
Trykket i inntaksmanifolden, sammen med åpningsvinkelen til gassventilen (som måles med gassposisjonssensoren) og motorturtallet kan bestemme motorbelastningen. På grunn av mangel på MAF-sensor (Manifold Air Flow) beregnes mengden luft som trekkes inn basert på motordata og undertrykket i inntaksmanifolden. Det ble besluttet å ikke bruke en MAF-sensor, fordi signalet er mindre pålitelig fordi det ikke er designet for motoren. Å matche innstillingene til egenskapene til inntaksmanifolden er komplisert. Det kreves mange korreksjonsfaktorer for dette.
MPX4250AP MAP-sensoren som brukes er vist på figuren. MegaSquirt-kretskortet er som standard utstyrt med tilkoblingsmuligheter for denne typen MAP-sensor. Denne sensoren er også inkludert som standard i byggesettet. Mengden drivstoff som injiseres avhenger blant annet av mengden luft som er tilstede, fordi man forsøker å oppnå et støkiometrisk blandingsforhold (14,68 kg luft til 1 kg drivstoff). Det var et alternativ å ikke bruke både MAF- og MAP-sensorene. Mengden luft som trekkes inn ville da bli bestemt etter en såkalt Alpha-N-regulering. Det tas hensyn til gassventilens posisjon, som er avgjørende for mengden luft som er tilstede. Denne er imidlertid mindre nøyaktig enn en MAP-sensor, så denne ble ikke valgt. I dette prosjektet brukes gassposisjonssensoren kun til akselerasjonsanrikning.

Kjølevæsketemperatursensor:
I det klassiske oppsettet er det ingen temperatursensorer på motorblokken. Motoren er som standard utstyrt med et bimetall, som har som funksjon å slå på dashbordlyset dersom kjølevæsketemperaturen er for høy. Fordi motorstyringssystemet tar hensyn til temperaturen på kjølevæsken og inntaksluften, ble det besluttet å ettermontere NTC-motstander. En NTC-motstand har en negativ temperaturkoeffisient. Dette betyr at motstandsverdien synker når temperaturen øker. Kjølevæsketemperatursensoren som er valgt er en sensor som har en motstandsverdi på 2,5 kiloohm ved 25⁰ Celsius. Motstandsendringen er størst i det viktigste temperaturområdet. Egenskapene til NTC-motstanden må kartlegges for å beregne en korrekt temperatur.
Motstandsendringen er størst ved en endring i temperaturområdet mellom 0⁰C og 60⁰C. Dette kan sees av karakteristikkens forløp; i det nevnte temperaturområdet er det en motstandsnedgang på omtrent 5kΩ, mens ved T ≥ 60⁰C avtar motstanden knapt. I noen tilfeller er det ønskelig å også måle temperaturer over 60°C. For å gjøre dette mulig, kan den interne forspenningsmotstanden byttes til en forspenningsmotstand med en annen verdi ved en viss temperatur. Dette gir to NTC-karakteristikker. I dette prosjektet brukes imidlertid kjølevæsketemperaturen utelukkende til kaldstartanrikningen, som knapt brukes over 60°C.
De lave temperaturene er også de mest interessante; kaldstartberikelse vil finne sted her; injektoren er aktivert lenger når motoren er kald. Når motoren er varmet opp tilstrekkelig (T ≥ 60⁰C), skjer mindre og mindre berikelse. Fra en T = 90⁰C kjører injeksjonsstrategien i henhold til de angitte verdiene i referansefeltet. Referansefeltet er en standardverdi som er angitt. Eksterne faktorer, som en kaldstartanriking ved lav temperatur, danner en korreksjonsfaktor til denne standardverdien. MegaSquirt tar ikke lenger hensyn til kjølevæsketemperaturen.
Lambdasensor:
Det er montert en lambdasensor (sensor) i eksosen som måler luft/drivstoff-forholdet i avgassene. Lambdasensoren har en viktig oppgave med å "tune" motorstyringen på et senere tidspunkt ved å fylle ut AFR- og VE-tabellene. For å få innsikt i det ideelle blandingsforholdet og nytten og nødvendigheten av å berike eller forarme, defineres først det støkiometriske blandingsforholdet, berikelse og utarming.
Det støkiometriske blandingsforholdet angir forholdet mellom luft og drivstoff der alt oksygen fra luften brukes. Dette er tilfellet med forholdet 14,68:1 (avrundet til 14,7 kg luft til 1 kg bensin). Vi snakker da om λ = 1.
Lambdaverdien kan variere under forskjellige driftsforhold:
- Anrikning: λ < 1;
- Utfattig: λ > 1.
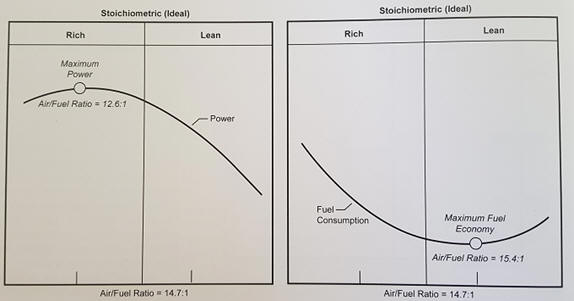
Anrikning til λ = 0,8 betyr at et blandingsforhold på 11,76 kg luft til 1 kg bensin gjelder. Så det er mindre luft tilgjengelig for å brenne 1 kg drivstoff. Anrikning eller utarming av blandingen må alltid holde seg innenfor eksplosjonsgrensene. Anrikning skjer når motoren må levere mer kraft. En rikere blanding gir også avkjøling. En mager blanding gir derimot bedre drivstofforbruk. Bildet nedenfor viser to grafer som viser maksimal effekt og laveste drivstofforbruk.
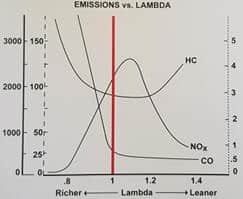
Lambdaverdien påvirker ikke bare kraft og drivstofforbruk, men også eksosutslipp. En rikere blanding sikrer lavere NOx-innhold, men også høyere CO- og HC-utslipp. Med en magrere blanding er drivstoffpartiklene lenger fra hverandre, slik at forbrenningen ikke lenger er optimal; med det resultat at også HC-utslippene øker. Bildet under viser utslippene knyttet til lambdaverdien. Ved bruk av en katalysator er det ønskelig å sikre at injeksjonen hele tiden veksler mellom rik og mager. I en rik blanding dannes CO som følge av oksygenmangel, som katalysatoren reduserer NOx med. En mager blanding inneholder et overskudd av oksygen, som oksiderer CO og HC.
Det finnes to typer lambdasensorer; hoppsensoren og bredbåndssensoren. MegaSquirt støtter begge typer. Ved setting av VE-tabellen er imidlertid en hoppsensor uegnet og det ble derfor valgt å bruke bredbåndssensoren. VE-tabellen settes ved å justere VE-verdiene til den målte AFR. Selv om VE-verdiene i prinsippet kan legges inn gjennom beregninger og i stor grad basert på dreiemomentkurven, ligger AFR raskt utenfor rekkevidden til hoppsensoren. En bredbåndssensor tilbyr en løsning på grunn av det store måleområdet; den kan måle en AFR mellom 8,0 og 1,4. Blandingssammensetningen vil i nesten alle tilfeller ligge i dette måleområdet når motoren går, så bredbåndssensoren egner seg til å dekke VE-tabellen. Tuning uten bredbåndssensor er praktisk talt umulig.
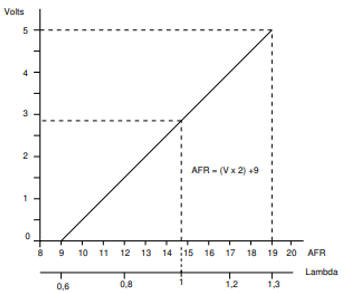
MegaSquirt har ikke en intern lambdakontroller. Når egenskapene til bredbåndssensoren er kjent, kan de legges inn i en tabell i TunerStudio-programmet. I andre tilfeller kreves en bredbåndssensor med ekstern kontroller. Utgangsspenningen er gjort lineær av den eksterne kontrolleren. Utgangsspenningen fra kontrolleren til MegaSquirt er mellom 0 og 5 volt, med forholdet mellom lambdaverdien og spenningen lineært. Spenningsverdien konverteres til en lambdaverdi i MegaSquirt. Figuren viser grafen med lineær gradient.
Volgende: Aktuatorer.