Emner:
- Kontrollteknologi
- Prosesskontroll basert på driftsforhold
Kontrollteknologi:
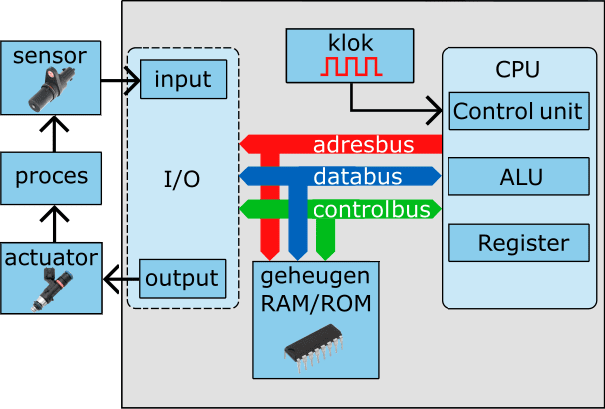
ECU måler, kontrollerer og regulerer prosessene. ECU mottar informasjon fra sensorer. En sensor konverterer en endring i en fysisk mengde til et elektrisk signal. Denne sensorinformasjonen kommer inn i ECU via inngangen. Mulige inngangssignaler kommer fra:
- hastighet sensor;
- temperatur sensor;
- last (negativt trykk) sensor;
- oksygensensor.
Informasjonen som kommer inn leder ikke nødvendigvis direkte til en handling. Kun når en målt verdi avviker fra ønsket verdi kan styringen av aktuatoren justeres. ECU har da en "regulerende" funksjon. Ja/nei beslutninger tas ved hjelp av det forhåndsprogrammerte dataprogrammet (ROM / Flash-minne).
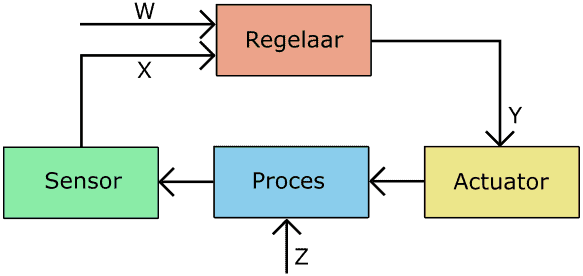
Å måle: sensoren, i dette tilfellet en sensor, måler en fysisk størrelse og konverterer den til et elektrisk signal. Denne målte verdien (X) sendes til kontrolleren. Den målte verdien trenger ikke nødvendigvis å føre direkte til en handling; tenk på en konstant temperatur.

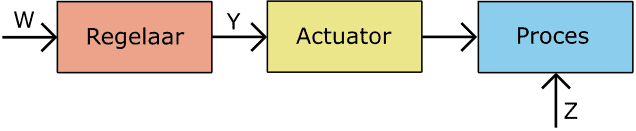
Å styre: kontrolleren (ECU) styrer en aktuator. Det er ingen tilbakemelding fra en sensor, så ECU følger ikke prosesssekvensen. En feil i prosessen er derfor ikke alltid erkjent. Et eksempel på kontrollen er manuell betjening av hornet (W); ECU styrer hornet (Y) når bryteren betjenes. Det er ingen kontrollfunksjon på hornet, så feil (Z) gjenkjennes ikke.
Å arrangere: kontrolleren kan behandle en manuell kommando (W) eller en målt sensorverdi (X) til en aktuatorstyring. Aktuatoren forårsaker en endring i prosessen; vurdere for eksempel injeksjonsvarigheten. Å injisere mer betyr en rikere blanding. Oksygeninnholdet måles av lambdasensoren og overfører denne målte verdien (X) til kontrolleren. Når en uforutsett feil er tilstede (f.eks. en blokkering i en injektor), forårsaker dette en endring (Z) i prosessen. Dette avviket måles også av sensoren, slik at regulatoren kan justere prosessen ved hjelp av aktuatorstyringen.
Prosesskontroll basert på driftsforhold:
Motorstyringssystemet til en forbrenningsmotor må brenne blandingen optimalt under alle driftsforhold. Bestemmelse av blandingssammensetning og tenningstidspunkt er avgjørende for å garantere eksosgasssammensetningen (utslipp), økonomi og oppnå ønsket effekt.
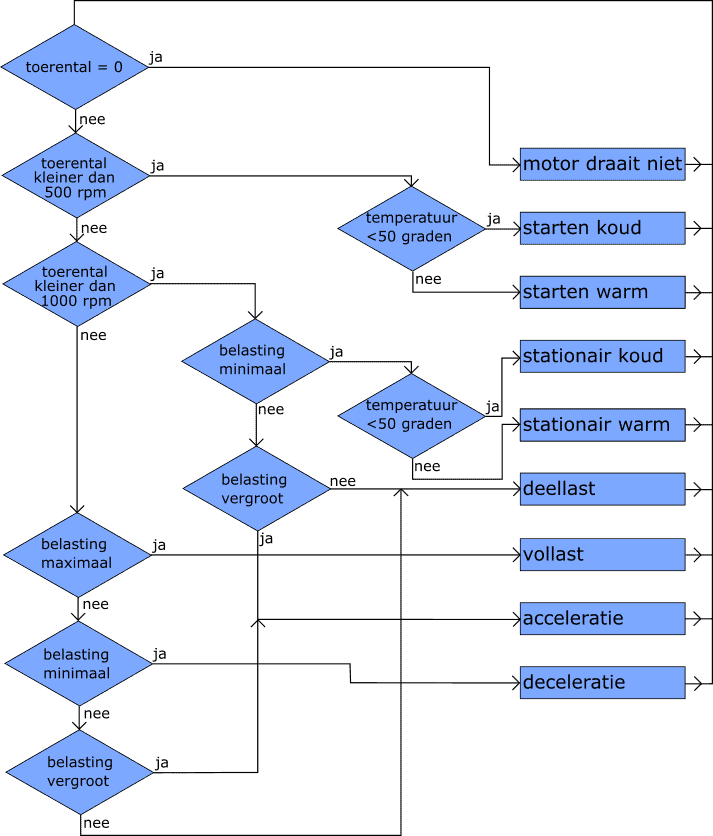
Hver driftstilstand har sin egen kontrollteknologi:
- Kaldstart: blandingen er rik og tenningen er sen;
- Varm start: blandingen er mindre rik enn under kaldstart;
- Kald tomgang: blandingen er rik og tomgangshastigheten økes;
- Varm tomgang: blandingen er mindre rik ved lavere tomgangshastighet;
- Dellast: blanding støkiometrisk, hastighetsområde mellom 1500 og 4000 rpm, tenningstidspunkt er forhåndsdefinert, lambdakontroll er aktiv;
- Full belastning: blandingen er beriket, belastningen og hastigheten er høy;
- Akselerasjon: blanding rik, tenning sent;
- Retardasjon: blanding mager, tenning tidlig.