Emner:
- Generell parkeringshjelp
- Parker avstandskontroll
- Achteruitrijkamera
- Fra siden
- Surround utsikt
- Parkeringshjelp
Generell parkeringshjelp:
Parkeringshjelp inkluderer systemer som hjelper en sjåfør med å komme seg inn og ut av parkering. Det mest kjente parkeringsassistentsystemet er «park distance control», forkortet PDC. Dette systemet informerer føreren av kjøretøyet om avstanden til bilen bak, eller med omfattende systemer også til fronten av kjøretøyet. Denne siden beskriver moderne teknologier som enten er en forlengelse av parkavstandskontrollen eller et helt frittstående assistansesystem.
Parkavstandskontroll:
Park Distance Control (PDC) er et avstandsvarslingssystem som måler signaler ved inn- og utkjøring av parkeringsplasser og gir informasjon om avstanden til hindringen. Det er ultralydsensorer i støtfangeren bak og ofte også i støtfangeren foran (se bilde). Disse sender ut lydbølger med svært høy frekvens som er umerkelige for det menneskelige øret. Disse ultralydfrekvensene reflekterer objekter i nærheten og mottas av sensoren. Sensoren måler tiden mellom sending og mottak av disse signalene. Jo nærmere objektet er, jo raskere spretter signalet tilbake. Sensoren fanger det opp og sender det videre til PDC-kontrollenheten (datamaskinen).
Denne datamaskinen kan overføre den til sjåføren i lydsignaler og med både bilde- og lydsignaler. En pipelyd høres da, som blir stadig raskere etter hvert som objektet kommer nærmere. På en avstand på cirka 30 cm avgir den et konstant pip, som forteller deg som sjåfør at du må stoppe.

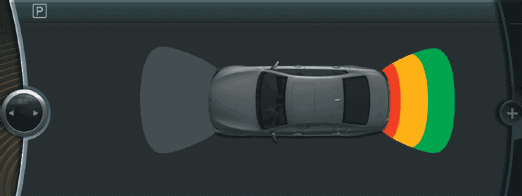
Moderne omborddatamaskiner er ofte utstyrt med en mulighet hvor avstanden til objektet vises på en skjerm. PDC-sensorene er de samme; kontrollenheten beregner dataene fra sensorene og behandler dem til informasjon som skjermen kan vise.
Bildet nedenfor viser PDC-kontrollenheten (ECU). Denne grå firkanten inneholder mikrokontrolleren, forsterkeren og en OG-port. Mikrokontrolleren overfører en firkantbølgespenning med en frekvens på omtrent 40 kHz (svart). En blokkspenning med lav frekvens sendes også periodisk ut (rød/blå). OG-porten mottar de to blokkspenningene. Når begge spenningene er høye, er utgangsspenningen (til høyre for OG-porten) høy. Når en av de to spenningene er lav, blir også utgangen lav. Utgangsspenningen sendes tilbake til mikrokontrolleren og til senderen i PDC-sensoren. Senderen sender ut ultralydsignalet med en hastighet på ca. 300 m/s. Når en gjenstand er i nærheten, reflekteres ultralydlyden og registreres av mottakeren. Vi kaller dette "triangulering". Mottakeren sender det dannede blokksignalet til ECUen. Blokksignalet forsterkes ved hjelp av en forsterker og behandles deretter av mikrokontrolleren.
Tiden mellom mottak av utgangssignalet fra OG-porten og forsterkeren er et mål på avstanden til objektet. Jo mindre avstanden er mellom PDC-sensoren og objektet, desto kortere er tiden. Mikrokontrolleren styrer summeren eller kommuniserer med andre kontrollenheter via CAN-bussen.
Kretsskjemaet (VAG) under viser kommunikasjonen mellom kontrollenhetene, innganger til brytere og utganger til blant annet summeren.
PDC-styreenheten (J446) mottar kjørehastighet og reverssignal via CAN-bussen. PDC-kontrollenheten sender en modulert blokkspenning via tilkobling T12/11 til kabelskjøten (X86 i bakre støtfanger) som er koblet til alle PDC-sensorer (G203, G334, G335 og G206). Hver PDC-sensor har sin egen signalledning (via pinne 2) til ECU. Videre er jordingen til hver sensor koblet til en jordsveis (352).
Når en eller flere sensorer oppdager et objekt, aktiverer kontrollenheten summeren (H15). Avhengig av avstanden til objektet avgir summeren et raskere eller langsommere intermitterende lydsignal.

Takket være kommunikasjon med diagnosegrensesnittet (J533), er det mulig å utføre følgende diagnosefunksjoner:
- spørre feilminne
- Juster koding av kontrollenheten (f.eks. etter utvidelse av systemet med PDC-sensorer foran eller etter montering av tilhengerfeste)
- justere lydstyrken
- Spør målte verdiblokker av blant annet avstanden fra alle sensorer til objektet, beregnet avstand og stabiliseringstid for sender og mottaker.
Ryggekamera:
I tillegg til parkeringsavstandskontrollen kan parkeringshjelpen også utstyres med ryggekamera. I det øyeblikket føreren setter kjøretøyet i revers eller trykker på en knapp i interiøret, aktiveres kameraet bak på kjøretøyet. Vanligvis viser skjermen på radioen eller datamaskinen ombord bildet.
Bildet nedenfor viser en BMW-skjerm med bildet bak på kjøretøyet. Til høyre for kamerabildet er et kjøretøy med tredelt rutenett foran og bak; Dette viser avstanden til et objekt som PDC-sensorene registrerer.
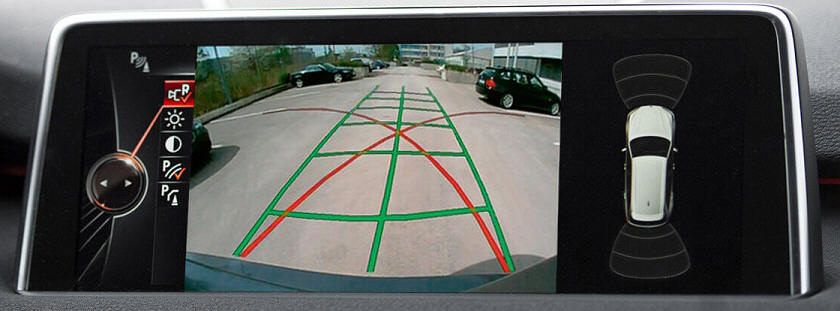
Røde og grønne linjer kan sees i ryggekamerabildet. De røde linjene viser mulig retning kjøretøyet kan styres i; Ved maksimal styring vil hjulene følge den røde linjen på utsiden av svingen. Det grønne rutenettet følger retningen styret dreies i; i dette øyeblikk er forhjulene rett frem. Når sjåføren dreier på rattet, indikerer de grønne linjene de faktiske kjørelinjene. Styrevinkelsensoren registrerer posisjonen til rattet.
Ryggekameraet er noen ganger synlig og er ofte plassert i nærheten av bilskiltet og/eller håndtaket for å åpne bakluken. Noen ganger velger produsenter å montere kameraet ute av syne. Bildet nedenfor viser et VW Golfs ryggekamera, med en elektrisk motor som vipper VW-emblemet for å flytte kameraet utover. Emblemet foldes automatisk tilbake når du kjører forover igjen. Ikke bare er kameraet plassert ute av syne, objektivet blir også mindre raskt skittent.

Sett fra siden:
Når du rygges mellom to kjøretøy eller store gjenstander, må du kjøre litt fremover for å se til venstre og høyre. Dette er mye enklere med et sidekamera (også kalt corner view); kameraer til venstre og høyre i støtfangeren foran sender bildet til skjermen i dashbordet. Bildet viser utsikten fra hjørnekameraene. Kameraer kan dessverre ikke monteres usynlig. Biler utstyrt med sidekamera har en (ofte) svart linse i støtfangeren. Bildet nedenfor viser støtfangeren foran på en BMW med venstre kamera.


Surround utsikt:
De mest luksuriøse parkeringsassistansesystemene inkluderer utvilsomt "surround view", også kjent som top view, 3D eller bird-view. Hvert merke gir sitt eget navn og karakteristikk til systemet. Vi bruker nå navnet surround view.
Med surround view vises toppen av bilen på skjermen. Det ser ut som det er et kamera som ser på taket på bilen og området rundt det. Bilen er en simulering og miljøet er registrert av flere (vanligvis fire) kameraer sammensatt.
De følgende tre bildene (fra BMW) viser bildet sjåføren ser. Ved parkering er separasjonen av parkeringsplassen og gjenstander som stolper etc. godt synlig. Ved rygging kan du zoome inn på baksiden; Her kan du hovedsakelig se planter. De konvensjonelle PDC-sensorene registrerer avstanden til plantene. Datamaskinen markerer denne avstanden med en rød farge.

Ved foroverparkering kan systemet også vise omgivelsene og fronten. PDC-sensorer hjelper nå også med å bestemme avstanden til gjerdet.

Parallellparkering langs en fortauskant kan, dersom føreren ikke er forsiktig, forårsake skader på dekk og felger. Surroundvisningen tilbyr også en løsning nå; Takket være god oversikt over gatebildet kan du parkere rett og nær fortauskanten. Den siste utviklingen fra BMW gjør det mulig å snu kamerabildet og simulere kjøretøyet.

De neste tre bildene viser stedene hvor kameraene ofte er plassert.



Parkeringshjelp:
Som en forlengelse av parkeringshjelpen kan den såkalte «ute-av-parkeringsassistansen» bistå føreren når han forlater en parkeringsplass bakover med begrenset sikt. Dette kan være i situasjoner der kjøretøyet er parkert inntil en vegg eller mellom kjøretøy.
Sensorene bak på bilen registrerer trafikk som passerer bak kjøretøyet og muligens utgjør en kollisjonsfare. Dette inkluderer alle bevegelige objekter som nærmer seg kjøretøyet med en viss hastighet. Når parkeringsassistentsystemet oppdager et kjøretøy som nærmer seg, vises en melding på infotainmentsystemets display. Et akustisk lydsignal legges vanligvis til dette. Hvis sjåføren ignorerer disse signalene og kjører baklengs, griper systemet fysisk inn ved å betjene bremsene for å bremse kjøretøyet.
