Diameteren på remskivene (som komponentene som drives av multibeltet)
Figuren viser at gir A har 20 tenner og gir B har 40 tenner. Forholdet er 40/20 = 2:1. Dette betyr at gir A (drevet) gjør to omdreininger når gir B gjør én omdreining. I praksis er dette aldri tilfelle. Det sikres alltid et forhold, som aldri er nøyaktig 2,00:1, fordi i sistnevnte tilfelle går de samme tennene i inngrep med hver omdreining. Hvis gir B hadde 39 tenner (1,95:1) eller 41 tenner (2,05:1), ville tannhjulene til A og B gripe inn en tann ytterligere for hver omdreining, noe som resulterte i 20 ganger mindre slitasje enn forholdet 2:1.
Et høyt utvekslingsforhold (der drivgiret er lite og det drevne giret er stort) gir høy toppfart og lavt utvekslingsforhold gir mer trekkraft. I girkassen til en bil (i prinsippet alle motorkjøretøyer) tar designet hensyn til formålene som bilen skal brukes til. En bil som i hovedsak er beregnet på å transportere tung last vil trenge mer trekkraft ved lave gir enn en sportsbil som trenger å kunne nå høy toppfart. Utvekslingsforholdet til høyeste gir må konstrueres på en slik måte at maksimalt motorturtall kan oppnås ved maksimal motoreffekt. Det ville vært synd om hastigheten allerede var nær grensen og det fortsatt var nok kraft igjen til å akselerere ytterligere. I tillegg til høyeste gir må også laveste gir velges med omhu; bilen skal kunne kjøre avgårde i første gir i 40 % helling under de verste forhold uten problemer. I tillegg skal utvekslingene til mellomgirene, dvs. 2, 3 og 4 (evt. også 5 hvis det gjelder en 6-trinns girkasse) bestemmes mellom dem.
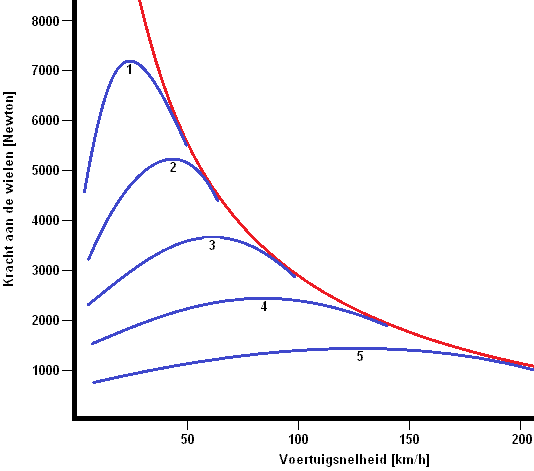
Strøm til hjulene I grafen (på bildet) er motorkarakteristikken indikert med de blå linjene og kjøretøykarakteristikken er indikert med den røde linjen. Her ser man tydelig at 1. gir leverer en høy kraft til hjulene (ca. 7200N, altså 7,2kN) og at høyeste gir (5.) leverer en kraft på maks 1500N til hjulene. Når kjøretøyets hastighet og akselerasjon øker, reduseres kraften som leveres til hjulene. Progresjonen til de blå linjene er et resultat av transmisjonsforholdene og den skrånende røde linjen er resultatet av kjøremotstanden (rulle- og luftmotstand).
Bestem K-faktor i henhold til den geometriske serien: Følgende tekst er relatert til sagtanndiagrammet nedenfor.
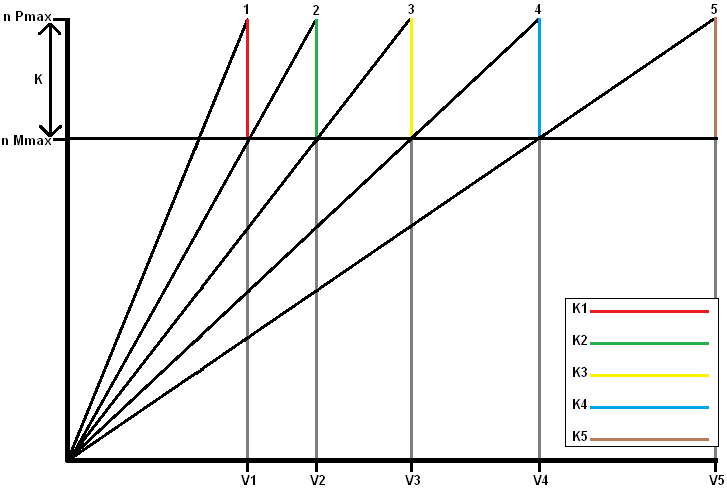
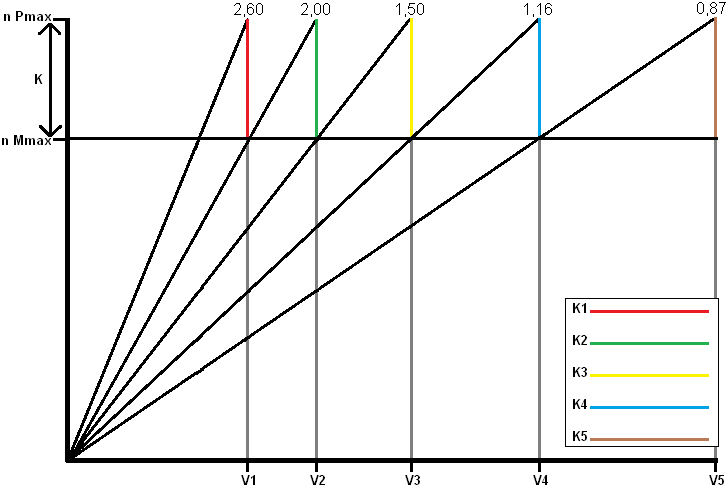
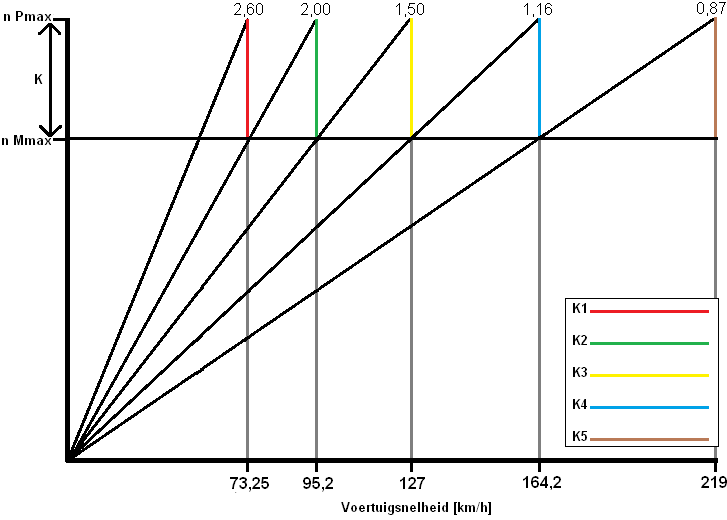
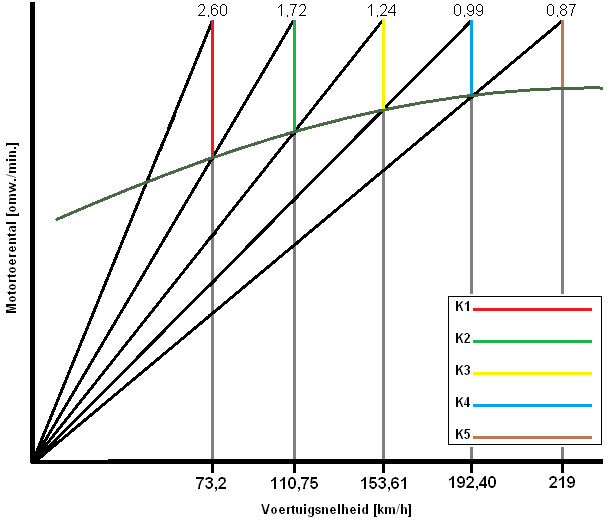
Hvis du akselererer til maksimalt motorturtall i første gir, må du bytte til 2. gir. Etter giring og utkobling vil motorhastigheten ha sunket og kjøretøyets hastighet vil fortsatt være den samme. Ved skifting fra 1. til 2. gir følger motorturtallet den røde linjen i grafen nedenfor. Motorturtallet vil falle fra "n Pmax" til "n Mmax". De fargede linjene skisserer K-faktoren. Størrelsen på K-faktoren bestemmer størrelsen på de fargede linjene. Hvis "n Mmax" og "n Pmax" er nær hverandre, er K-faktoren liten. Så det er mindre gap mellom overføringene. Det fungerer på samme måte med de andre girene. Hvis du akselererer til "n Pmax" fra 2. gir (opp til V2), følges den grønne linjen til "n Mmax" ved giring.
n Pmax: Motorturtallet der maksimal effekt oppnås (f.eks. 6000 rpm) med "n Pmax" som "hastighet ved maksimal effekt"
n Mmax: Motorturtallet der maksimalt dreiemoment oppnås (f.eks. 4000 rpm) med "n Mmax" som "hastighet ved maksimalt dreiemoment"
Forholdet mellom hastighetene og girene forblir de samme. Alle fargede linjer (K1 til K5) forblir derfor de samme. K-faktoren bestemmes av motorkarakteristikken. K-faktoren ligger mellom motorhastighetene til maksimalt dreiemoment og motorens maksimale effekt. Girkassen til girkassen beregnes derfor ut fra denne motorkarakteristikken. K-faktoren kan bestemmes for den geometriske serien som følger: K = n Pmax / n Mmax K = 6000 / 4000 K = 1,5
K-faktoren på 1,5 bestemmer reduksjonene (transmisjonene) for alle gir. Disse er alle koordinert med hverandre. Den geometriske serien brukes ikke på personbiler på grunn av de store gapene i de høyere girene. Girkassene til personbiler er designet i henhold til den korrigerte geometriske serien (Jantes serie).
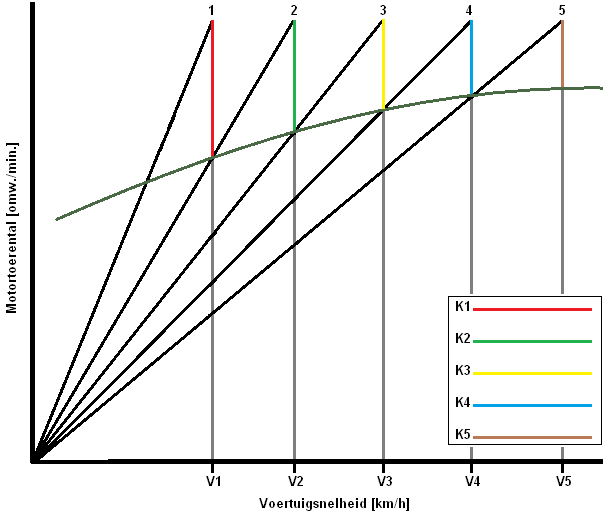
Bestem K-faktoren i henhold til den korrigerte geometriske serien (Jantes serie): I personbiler er avstandene mellom de lave girene ofte store og blir mindre med de høyere girene. Små hull mellom de høye girene gir lite tap av akselerasjon. Utvekslingene i de høyere girene blir mindre og mindre, noe som gir maksimal utnyttelse av motorkraften. Du kan også legge merke til dette; Motorturtallet synker ytterligere mellom veksling fra 1. til 2. gir enn mellom veksling fra 3. til 4. gir. Dette er synlig i sagtanndiagrammet nedenfor; den røde linjen er større enn den gule linjen:
Regneserien kalles også "Jantes serie". Det er en korrigert geometrisk serie. K-faktoren er forskjellig mellom alle gir. Dette har store fordeler sammenlignet med den nevnte geometriske serien med den faste K-verdien. Fordi utvekslingene i de høyere girene blir mindre, brukes maksimal motoreffekt. Kraften på hjulene er nå større enn i den geometriske serien. K-faktoren er nå forskjellig for hvert gir (alle fargede linjer har forskjellig lengde), så det må nå bestemmes ved beregning. Utvekslingsforholdene til girene kan bestemmes ved hjelp av K-faktoren. Uten å kjenne til K-faktoren kan reduksjonen av laveste eller høyeste gir bestemmes, men resten av akselerasjonene må da beregnes med K-faktoren. Først da kan sagtanndiagrammet tegnes.
Bestemme girforhold (introduksjon): Girkasseprodusenten må ta hensyn til en del ting. Transmisjonene i girkassen må monteres med omhu. For eksempel er faktorer som hastighetene der motoren har mest dreiemoment og kraft, den dynamiske dekkradiusen, reduksjonen av differensialen og effektiviteten til hele drivverket viktige. Dette er oppført nedenfor:
Hastighetene der motoren har mest dreiemoment og kraft: Dette er hastighetene "n Pmax" og "n Mmax" vist i den geometriske serieillustrasjonen ovenfor.
Den dynamiske dekkens radius: Dette er avstanden mellom sentrum av navet og veibanen. Jo mindre hjulet er, jo høyere hastighet vil hjulet være ved samme kjøretøyhastighet. Den dynamiske dekkradiusen kan beregnes som følger (hvis den allerede er kjent): Dekkdimensjonen må være kjent for å beregne dette. Som et eksempel tar vi dekkstørrelsen 205/55R16. Dette betyr at dekket er (205 x 0,55) = 112,75 mm = 11,28 cm høyt. Fordi den er 16 tommer, må denne konverteres til centimeter: 16 x 2,54(tommer) = 40,64cm. Det gjelder avstanden mellom veibanen og navet, så totalhøyden på 40,64 cm må deles med 2: 40,64 / 2 = 20,32 cm. Den dynamiske dekkradiusen (Rdyn) er nå: 11,28 + 20,32 = 31,60 cm.
Reduksjonen av differensialen: Differensialen har alltid et fast utvekslingsforhold. Girkassen skal være giret til dette. Nyttekjøretøy kan ha opptil 5 differensialer i drivverket.
Effektiviteten til den totale drivlinjen: På grunn av blant annet friksjonstap er det alltid et visst prosentvis tap. Dette avhenger også av tykkelsen på oljen (og temperaturen). Vanligvis er avkastningen rundt 85 til 90 %.
Nå skal vi bestemme girforholdene (reduksjonene) til en fiktiv motor og girkasse.
Følgende spesifikasjoner er kjent:
Vekt på kjøretøy: 1500 kg
Fallakselerasjon (G): 9,81m/s2
Girkassetype: Manuell med 5 gir og revers
Dynamisk dekkradius: 0,32m (= 31,60cm fra forrige beregning)
Først må det bestemmes hvor mye dreiemoment hjulene kan overføre til veibanen. Dette avhenger av tilstanden kjøretøyet er i, for kjører det på en asfaltvei med lav rullemotstandskoeffisient? Dette kan beregnes sammen med rullemotstanden og den dynamiske dekkradiusen. Formelen for rullemotstand er som følger: Frol = μ xmxgx cos α (for forklaring, se siden kjøremotstander) Frol = 0,020 x 1500 x 9,81 x cos 18 = 279,9 N
Fordi det er en helning, må F-helling også beregnes: F stigning = mxgx sin α F-helling = 1500 x 9,81 x sin 18 = 4547,2 N
Luftmotstanden kan neglisjeres, så den totale kjøremotstanden er som følger: Frij = Frol + Fslope Frij = 279,9 + 4547,2 = 4827,1N
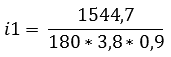
For å beregne det maksimale dreiemomentet som hjulene kan overføre til veibanen, må Frij multipliseres med den dynamiske dekkens radius Mwiel = Frij x Rdyn M hjul = 4827,1 x 0,32 Mhjul = 1544,7Nm
K-faktor: Nå skal vi beregne K-faktoren: K = n Pmax / n Mmax K = 6000 / 4500 K = 1,33
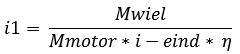
Beregn 1. girreduksjon: Formelen for å beregne første gir er som følger:
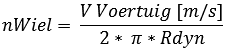
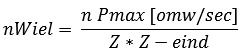
Beregn 5. girreduksjon (i henhold til den geometriske serien): Reduksjonen av 5. gir kan også bestemmes på lignende måte. 5. gir må bestemmes ut fra maksimalt motorturtall, fordi det ville vært irriterende om motoren fortsatt hadde nok kraft til å akselerere ytterligere mens maksimalt motorturtall (og dermed toppturtall på bilen) er nådd. Hastigheten på hjulet (nWheel) ved maksimal kjøretøyhastighet er også viktig. Dette må først beregnes:
Nå som hjulets hastighet er kjent ved maksimal kjøretøyhastighet på 220 km/t (61,1 meter per sekund), kan reduksjonen av 5. gir beregnes.
Beregning av andre reduksjoner (i henhold til den geometriske serien): I følge beregningene er reduksjonen av 5. gir 0,87 og K-faktor = 1,33. Med disse dataene (i henhold til den geometriske serien) kan reduksjonene til 2., 3. og 4. gir beregnes.
i5 = (har allerede blitt beregnet før) i4 = K x i5 i3 = K x i4 i2 = K x i3 i1 = K x i2
Reduksjonen i1 er allerede kjent her, så hvis resten er riktig beregnet, bør det samme tallet (nemlig 2,51) resultere. Et lite avvik er normalt, fordi det er gjort mange avrundinger i mellomtiden. Nå kan raden med alle reduksjoner fylles ut. Beregninger må gjøres fra topp til bunn. Svaret på i5 brukes for i4, og av i4 for i3 osv.
i5 = 0,87 i4 = 1,33 x 0,87 1,16 = XNUMX XNUMX i3 = 1,33 x 1,16 1,50 = XNUMX XNUMX i2 = 1,33 x 1,50 2,00 = XNUMX XNUMX i1 = 1,33 x 2,00 2,60 = XNUMX XNUMX
Den geometriske serietabellen kan nå fullføres.
Beregning av reduksjoner i henhold til den korrigerte geometriske serien (Jantes serie): Tidligere på siden ble forskjellen mellom den geometriske serien og den "korrigerte" geometriske serien forklart. Den korrigerte geometriske serien, også kalt "Jante-serien", har den fordelen at K-faktoren ved de høyere reduksjonene er nærmere hverandre. K-faktoren for den geometriske rekken var konstant (dette var n P maks delt på n M maks, og var 1,33). Dette ga også en konstant verdi i grafen. Med den korrigerte geometriske serien er det en linje i grafen som indikerer at K-verdien ikke er konstant. K-faktoren avtar for hver akselerasjon. Den korrigerte geometriske serien har en konstant verdi. Vi angir dette med en m. Verdien av m = 1,1.
Den generelle formelen for K-verdien til den korrigerte geometriske serien er som følger:
Forklaring av formelen: z-1 = antall gir minus ett i1 = reduksjon av første gir m til sjette potens = konstant til sjette iz = totalt antall gir
Utfylt gir dette den fjerde roten av 2,6 / (1,1^6 x 0,87) (Skriv inn kvadratroten i kalkulatoren som følger: skriv først inn 4, deretter SHIFT etterfulgt av det radikale tegnet med et x over. Skriv deretter multiplikasjonen under delelinjen mellom parentes).
Svaret er: 1,14
K-verdien til den korrigerte geometriske serien er derfor 1,14. Vi vil beregne dette videre:
i5 = (tidligere beregnet) i4 = K x i5 i3 = K2 xmx i5 i2 = K3 x m3 x i5 i1 = K4 x m6 x i5
i5 er kjent; dette er nemlig 0,87. K-verdien er 1,14 og m er 1,1. Med disse dataene kan vi fylle ut tabellen:
i5 = 0,87 i4 = 1,14 x 0,87 i3 = 1,142 x 1,1 x i5 i2 = 1,143 x 1,13 x i5 i1 = 1,144 x 1,16 x i5
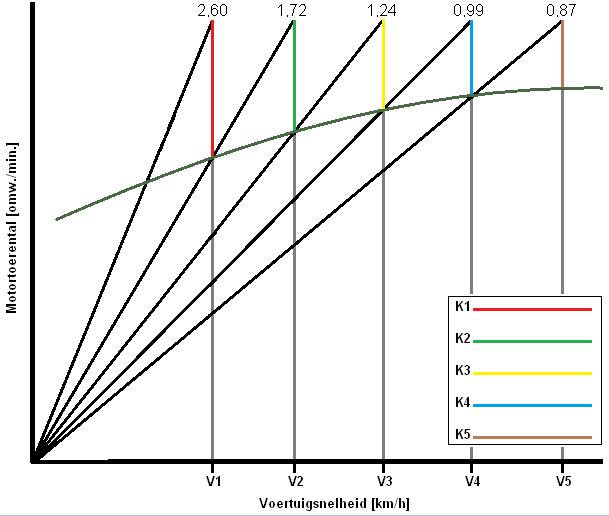
i5 = 0,87 i4 = 0,99 i3 = 1,24 i2 = 1,72 i1 = 2,60
Tabellen for den korrigerte geometriske serien kan nå fylles ut:
Beregn kjøretøyhastighet per reduksjon (geometrisk serie): Kjøretøyets hastighet kan bestemmes for hver reduksjon. Dette er den maksimale hastigheten som kjøretøyet kan oppnå i dette giret ved en maksimal hastighet på 6000 omdreininger per minutt. Regnestykket er som følger:
Kjøretøy 1. reduksjon = 2 x π x nHjul x Rdyn (nHjulet har nettopp blitt beregnet for det første giret og Rdyn var allerede kjent; dette er 0,32m. Formelen kan deretter legges inn:
Kjøretøy 1. reduksjon = 2 x π x 10,12 x 0,32 Kjøretøy 1. reduksjon = 20,35 m/sx 3,6 = 73,25 km / t
De andre akselerasjonene kan beregnes ganske enkelt ved å endre Z = 2,60 i den første formelen til reduksjonen av ønsket akselerasjon, og deretter legge inn denne som nWheel i den andre formelen. De andre girene har følgende utfall:
2. gir: 95,2 km / t 3. gir: 127 km / t 4. gir: 164,2 km / t 5. gir: 219 km / t (dette er toppfarten til bilen)
Disse hastighetene kan legges inn i tabellen for den geometriske serien.
Beregn kjøretøyhastighet per reduksjon (korrigert geometrisk serie): Regnestykket er helt likt og noteres derfor ikke lenger.
Som man nå tydelig kan se, er topphastighetene til bilen de samme for de geometriske og korrigerte geometriske seriene. I den geometriske serien (den første) er avstandene mellom de høyere girene svært store og i den korrigerte geometriske serien er avstandene mellom alle girene nesten like. Sistnevnte brukes i dagens kjøretøy.