Emner:
- Motorstyring med selvdiagnose
- Kontrollfunksjoner og kontroll av motorstyringen
- VE- og AFR-tabeller for å bestemme nødvendig mengde drivstoff
- Adaptivt læringsminne
- Forekomsten av en feilkode
- Justering av programvaren
Motorstyring med selvdiagnose:
Hver moderne bil har motorstyring. Dette er navnet på programvaren som er integrert i ECU (elektronisk kontrollenhet). Alle sensorer og aktuatorer på motoren er koblet til ECU med ledningsnett. Klikk her for mer informasjon om kontrollenhetene og nettverkene i bilen. Hovedfunksjonene til ECU er å kontrollere tenning og innsprøytning, for å oppnå så få utslipp som mulig. Det er mange andre funksjoner knyttet til dette, som alle påvirker hverandre. Disse er omtalt nedenfor.
ECU-en behandler de innkommende dataene (fra sensorene), behandler dem og kontrollerer deretter aktuatorene. Et eksempel på en sensor er lambdasensoren. Hvis lambdasensoren måler for høyt oksygeninnhold i avgassene, vil den videresende dette til ECU. ECU vet da at blandingen er for mager (for lite drivstoff = for mye oksygen i avgassene = for mager). ECU vil da justere innsprøytning og tenning til lambdasensoren sender et korrekt signal.

Når en sensor sender en umulig målt verdi (at kjølevæskesensoren indikerer en umålbar verdi), eller gjenkjenner at ledningen har kortslutning til pluss eller jord, vil ECU automatisk lagre dette som en feilkode. Fordelen med den omfattende programvaren er at feil signal blokkeres internt. For eksempel er ikke tenning og innsprøytning justert til feil temperatur, fordi ECU allerede har erkjent at dette signalet er feil.
ECU vil imidlertid kontrollere kjøleviften fullt ut, fordi riktig temperatur ikke lenger kan måles. Som en forholdsregel er det gitt ekstra kjøling. Et gult motorlys vil da lyse på dashbordet. Bilen må da leses opp. Klikk her for å gå til OBD-siden hvor det gis mye forklaring om lesefeil og andre muligheter ved diagnoseutstyret.
Et annet eksempel er en tennspole som har sviktet. Drivstoffet kommer uforbrent inn i katalysatoren og kan fortsatt brennes på grunn av for høye temperaturer. Veivakselsensoren vil registrere en hastighetsfluktuasjon på grunn av den manglende forbrenningen. Posisjonen til sylinderoverføringen gjenkjennes. Dette stopper aktiveringen av injektoren til sylinderen hvis tennspole er defekt. Motoren er nå i nødmodus og vil gå med 1 mindre sylinder. Motorfeillampen vil tennes. Hvis du leser den, blir det klart hvilken sylinder som slår feil.
For å lese ut kobles diagnosepluggen til datamaskinen (på bildet) til OBD-pluggen. Denne OBD-pluggen er vanligvis plassert nederst på dashbordet nær fotbrønnen (nær pedalene). Pluggen kan også være skjult andre steder på dashbordet eller bak askebegre. Ved å koble støpselet til avlesningsdatamaskinen sendes feilkodene videre til datamaskinen.
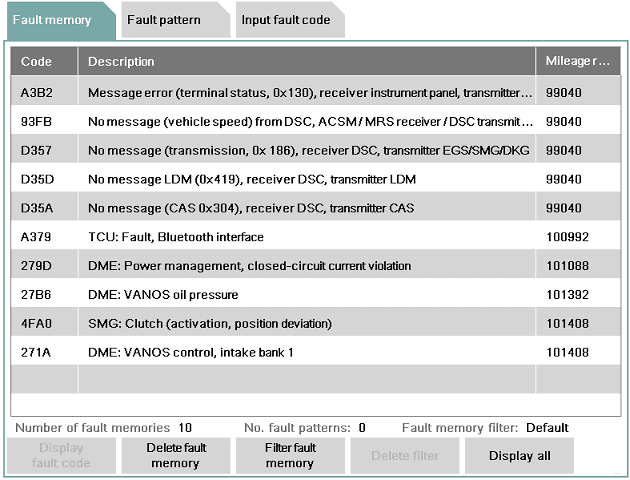
Når bilen leses, vil ECU overføre en feilkode til avlesningsdatamaskinen. Denne feilkoden (OBD-feilkoden) er ofte den samme for hvert merke. Disse kodene kan vises med en leseenhet. Feilkoden huskes av ECU og lagrer også følgende informasjon:
- Når feilen oppsto først og sist.
- Hvor ofte feilen har kommet tilbake.
- Enten det er en permanent eller (noen ganger) tilbakevendende feil.
Feilkoder er ikke alltid like for alle merker. Noen ganger er kodene merkespesifikke. Ved å slå opp feilkoden i Google kan betydningen ofte bestemmes.
Omfattende leseutstyr kobler en tekst til denne feilkoden. Koden blir da faktisk oversatt til tekst. For eksempel vil koden P0267 være knyttet til teksten: "Kjølevæsketemperatursensor usannsynlig signal; kortslutning med positiv." Oppstod først ved kjørelengde ……km, frekvens 120, skjedde sporadisk. Det er nå klart at enten har sensoren en intern defekt eller signalkabelen til sensoren kortslutter med en positiv kabel. Dette har skjedd totalt 120 ganger og er ikke permanent til stede. Dette kan bety at ved å flytte kablene oppsto kortslutningen 120 ganger for så å forsvinne igjen. Det er opp til teknikeren å finne ut hvor feilen ligger.
Når feilen er løst (f.eks. etter reparasjon av kabelen), kan feilen slettes. Testutstyret sender så en kode til ECU, som da forstår at feilen må skrives fra minnet. Hvis kabelen ikke repareres, men bare feilen er slettet, vil denne feilen umiddelbart komme tilbake. Etter sletting vil den første kilometertelleravlesningen være den gjeldende og frekvensen vil starte fra 1 igjen.
Kontrollfunksjoner og kontroll av motorstyringen:
Motorstyringens oppgave er å overvåke eller kontrollere blant annet følgende funksjoner:
- Motor hastighet
- fart
- Gasspedal / Bremsepedal / Clutchpedalposisjon
- betennelse
- injeksjon
- Variabel ventiltiming
- Variabel inntaksmanifold
- Dynamokontroll (DF-signal)
- Masse luftmålersignal
- Gassstilling
- EGR-ventilposisjon
- Veivaksel / Kamaksel posisjon
- Temperaturstyring via den kartstyrte termostaten
- Ping kontroll
- Lambda kontroll
- Elektronisk kjølevæskepumpe
- Tankventilasjon
- Drivstoffpumpe (booster og høytrykk)
- Cruise Control
- Veivhus ventilasjonsvarme
- Kontroll av oljenivå
- Turbotrykk
- Inntaksmanifoldtrykk
- Energistyring (sensor for batteriladestatus)
- Kommunikasjon med girkasse (beholder motorkraft ved giring med automatgir)
- Selvdiagnose (inkludert for lagring av feilkoder)
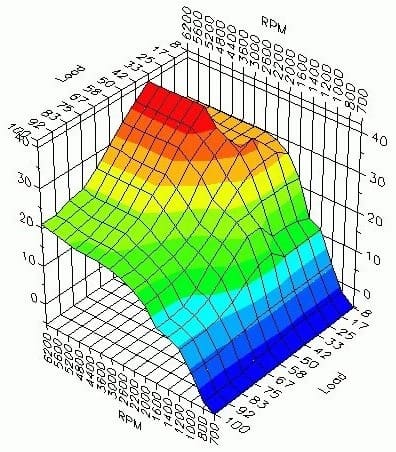
De innkommende signalene behandles alle i et karakteristisk felt (se bildet over). Kartet vil behandle inngangssignalene (fra sensorene) basert på blant annet motorturtall og belastning, uteluft, kjølevæske, motorolje og eksostemperaturer. Disse dataene brukes til å bestemme hva utgangen vil være, dvs. hvordan en aktuator skal styres, for eksempel. For eksempel, når motoren er kald, må mer drivstoff injiseres (kaldstartanrikning) for å holde motoren i gang. Dette pleide å skje med den manuelle choken, men med motorstyringen styres alt automatisk ved hjelp av VE og AFR tabeller. Disse tabellene viser fyllingsgrad og blandingsforhold.
Utetemperaturen og kjølevæsketemperaturen måles, og når motoren går, bestemmes tenningstidspunktet ved hjelp av bankesensorene og hastighetssensorene bestemmer om motoren går jevnt. Gassventilen vil også styres mer "åpen". Etter en viss tid vil temperaturen i brennkammeret være høy nok til å gå over til normal injeksjon.
Når motoren er i oppvarmingsfasen som nettopp beskrevet, kalles dette "Open Loop". Tilbakemeldingen fra lambdasensoren vurderes da ikke. Dette måler en alt for fyldig blanding (under kaldstartsanrikningen) og vil derfor faktisk ønske at motoren skal gå slankere. Men fordi berikelsen er nødvendig, ignoreres dataene fra lambdasensoren. Når motoren har nådd tilstrekkelig temperatur, vil de innkommende signalene fra lambdasensoren bli brukt igjen. Dette kalles da "Closed Loop". Kort sagt: ECU bestemmer hvilke signaler som brukes eller ikke.
De ulike feltene vises på siden injeksjonssystem rives.
Adaptivt minne:
Programvaren for motorstyring inneholder et såkalt "adaptivt læringsminne". Aktuatorene styres basert på data som tidligere er mottatt fra sensorene. Dette tar hensyn til noe slitasje og forurensning av motoren. Ved slitasje vurdere for eksempel et lavere kompresjonsslutttrykk, som gjør at tomgangsturtallet blir lavere enn ved ny motor. Programvaren for motorstyring må svare på dette ved å justere Drivstofftrim.
Det adaptive minnet lagrer blant annet data knyttet til åpning og lukking av strupeventilen. Over tid blir gassventilen skitten på grunn av påvirkningen fra EGR og veivhusventilasjonsgasser. Å åpne og lukke ventilen er litt vanskeligere og ventilen må åpne litt lenger hvis den er skitten, ellers vil karbonrestene blokkere luftveiene. Justeringen for en eldre motor vil derfor være annerledes enn for en ny motor. Uten det adaptive minnet ville kontrollen måtte søke etter de riktige verdiene på nytt hver gang motoren ble startet. Med det adaptive minnet tar motorstyringsprogramvaren hensyn til dette.
Etter rengjøring av for eksempel strupeventilen eller EGR-ventilen, må den ofte læres på nytt. Ved innlæring tilbakestilles det adaptive minnet. Etter innlæring vil motorledelsen igjen sjekke og lagre verdiene til sensorene. Etter innlæring kan det skje at motoren går og rister litt uregelmessig.

A lambdasensor blir tregere ettersom han blir eldre. Dataene kommer riktignok inn i motorstyringen, men gjennom det adaptive minnet tar motorstyringen hensyn til aldring av lambdasensoren. Det er derfor viktig å slette tilpasningsverdiene etter at lambdasensoren er byttet ut.
Automatgiret inneholder clutcher som styres av oljetrykk for å skifte gir. Eldre girolje er ofte noe forurenset og tykkere enn ny olje. Hastighetene og koblingspunktene vil derfor være annerledes med ny olje enn med gammel olje. Automatgiret inneholder også en kontrollenhet med adaptivt minne, som har justert skiftepunktene så ideelt som mulig over tid. Etter at oljen er skiftet, kan skifteoppførselen bli veldig forskjellig. Vurder feil hastighet for å bytte til lavere eller høyere gir, eller å slå på gir brått, noe som forårsaker en bank i drivverket. Derfor må også tilpasningsverdiene til girkassen slettes etter oljeskift.
En tilpasningskjøring må ofte gjøres etter at tilpasningsverdiene er slettet. Du må da kjøre med ulik hastighet og hastighet så mye som mulig, slik at systemet har mulighet til å riktig beregne og lagre tilpasningsverdiene.
Opprinnelsen til en feilkode:
En sensor kan være defekt. Lednings- eller pluggforbindelsen til sensoren kan også bli defekt, og forstyrre forbindelsen mellom sensoren og ECU. ECU mottar derfor feil verdier fra sensoren. Tidligere kunne dette påvirke driften av motoren; en defekt temperatursensor kan føre til at altfor mye drivstoff sprøytes inn og at motoren "flommer". Denne sjansen er mye mindre i disse dager. Motorledelsen kan gjenkjenne at verdien på sensoren er feil.
I dette eksemplet er spenningsprofilen til a temperatur sensor vist. Temperaturen fungerer med spenninger mellom 0,5 og 4,5 volt. Spenninger lavere enn 0,5 volt og høyere enn 4,5 volt er i forbudsområdet. Spenningene kan sees i grafen under. Hvis sensoren er defekt, eller en kabel har kortslutning med jord, overføres en spenning på 0 volt. Dette er i det forbudte området. ECU-en gjenkjenner dette og lagrer en feilkode.
Ikke bare er feilkoden lagret, men signalet brukes heller ikke. ECU-en bytter til en nødsituasjon; en erstatningsverdi beregnes fra andre data mottatt av ECU. Utskiftningsverdien er nær den faktiske verdien, så du kan fortsette å kjøre til verkstedet. Selvfølgelig er intensjonen å ignorere funksjonsfeilen, fordi for eksempel drivstofforbruket kan øke betydelig.
Justering av programvaren:
Programvaren i ECU kan justeres med egnet utstyr. Og selvfølgelig kunnskapen, for feil programmering kan forårsake alvorlige motorfeil. Omskriving av programvaren kan gjøres ved en programvareoppdatering fra produsenten (ved å fikse feil oppdaget i etterkant) eller ved å tune. Dette betyr at høyere effekt oppnås ved å justere det karakteristiske feltet i ECU. På siden chip tuning det er mer informasjon om dette.