Konvertering av analoge sensorspenninger til digital melding
Konvertering av pulsgeneratorsignal til digital melding
Utgangssignaler
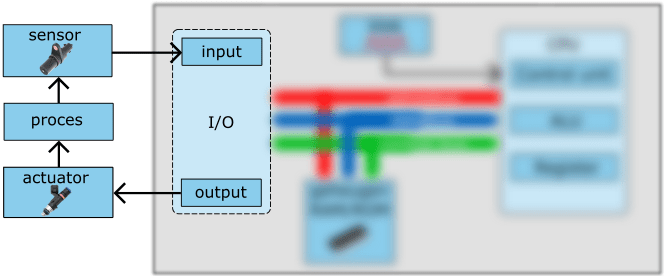
Forord: I de fleste tilfeller må de elektriske signalene fra sensorene justeres før de presenteres for prosessoren. Aktuatorene styres på den andre siden av datamaskinen. Dette er ofte induktive kretser som ofte bytter store strømmer. Maskinvaren for å justere sensorsignalene og aktuatorstrømmene kalles grensesnittkretser. En grensesnittkrets sikrer oversettelse av en analog til en digital spenning.
sensorer overføre en spenning med lav strøm. Grensesnittkretsen konverterer spenningen til en digital verdi (0 eller 1). Strømintensiteten er lav med et sensorsignal;
Aktuatorer krever høyere strøm. Om de styre aktuatorer, er plassert i ECU-en i form av (en kombinasjon av) transistorer eller FET-er, som også kalles "drivere". Vi vil diskutere dette mer detaljert i avsnittet "utgangssignaler".
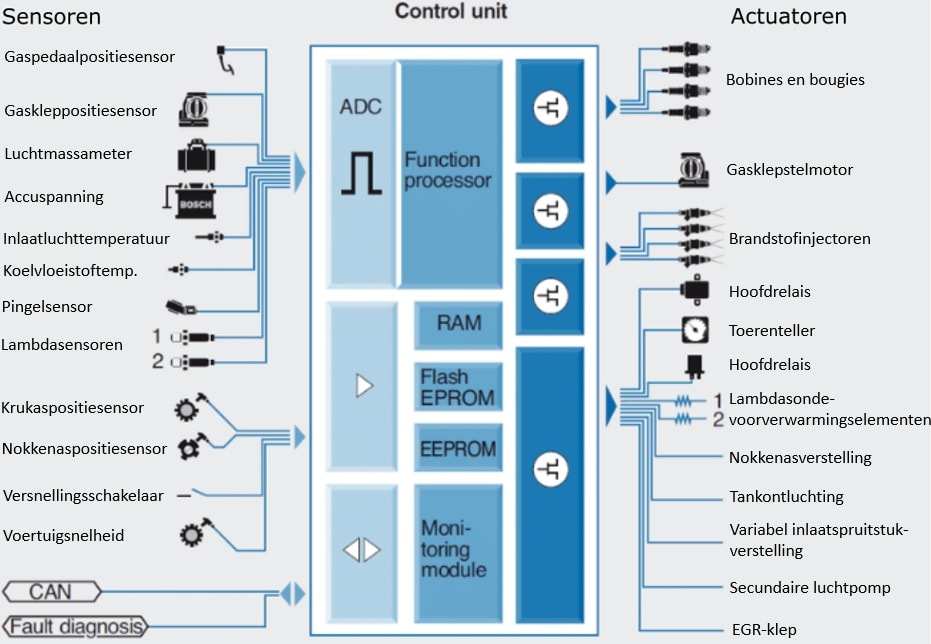
Bildet nedenfor viser sensorene og aktuatorene til et (bensin)motorstyringssystem. Den øverste gruppen av sensorer (fra gasspedalposisjonssensoren til lambdasensorene) faller inn under kategorien "analog". Dette betyr at de innkommende sensorspenningene først må digitaliseres i ADC (analog – digital omformer). Den nedre gruppen av sensorer (veivakselposisjonssensoren til kjøretøyets hastighetssensor) gir allerede signalet sitt digitalt. På-av-signalene eller blokkspenningene blir direkte tilført CPU-en.
Aktuatorene til høyre styres av et utgangstrinn. Et utgangstrinn, også kalt en driver, består av en krets med flere transistorer for å generere en brukbar spenning og strøm fra en kontrollpuls fra datamaskinen for å styre aktuatoren.
Motorstyringssystem med sensorer (venstre) og aktuatorer (høyre)
Transistor Transistor Logic (TTL): Prosessoren fungerer med spenninger på 5 volt. Inngangs- og utgangsspenninger er derfor begrenset til et område på 0 til 5 volt (TTL-nivå, forkortet fra Transistor Transistor Logic). For signaler som avviker fra dette spenningsnivået, skjer en justering i en grensesnittkrets.
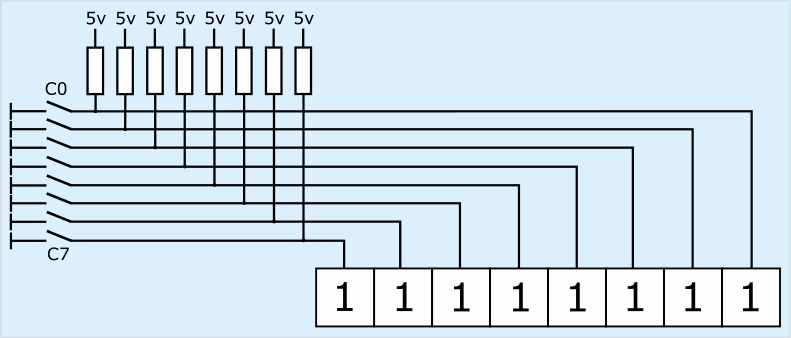
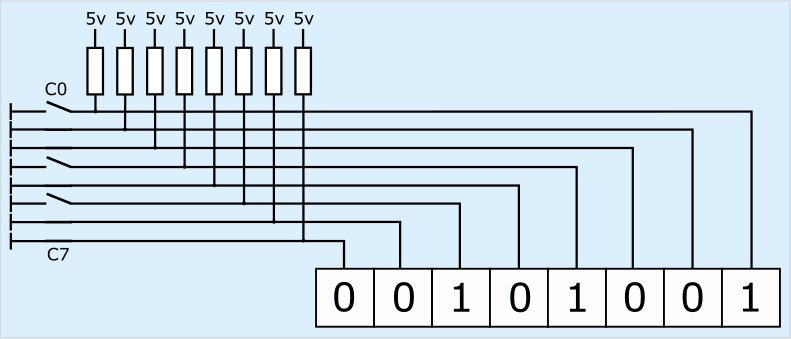
Bildene nedenfor viser hvordan en 1 eller en 0 dannes fra en bryterposisjon. Ved hjelp av en pull-up motstand gir spenningen på 5 volt en logisk 1 på inngangen til prosessoren når bryteren åpnes. Spenningen over pull-up motstanden er da ikke koblet til jord. Når bryterne lukkes, oppstår det et spenningsfall over opptrekksmotstanden. Spenningen på 0 volt ved inngangen til prosessoren blir sett på som logisk 0.
Alle brytere åpne: 11111111 på prosessorinngang
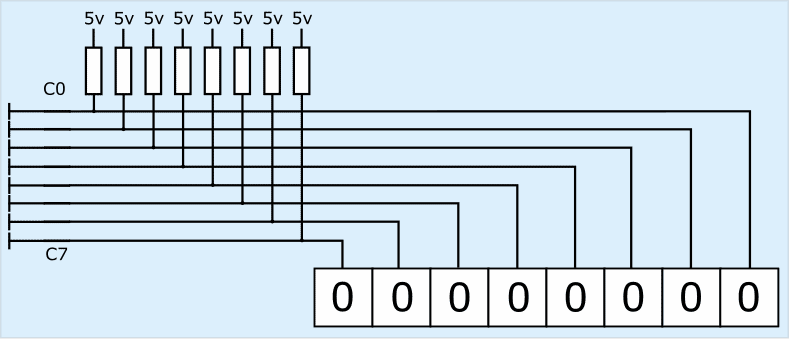
Alle brytere lukket: 00000000 på prosessorinngang
En kombinasjon av åpne og lukkede brytere produserer en serie med enere og nuller. På figuren er 8-bits meldingen til prosessoren: 00101001.
Med en 8-bits prosessor leses de åtte bitene samtidig per syklus. I løpet av neste syklus, som finner sted under neste "tikk" av klokken (se systembuss på siden om driften av ECU) følger en sekvens med åtte nye biter.
Åpne og lukkede brytere: 00101001 på prosessorinngang
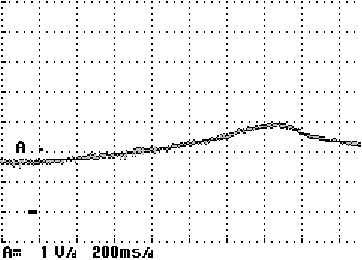
Konvertering av analoge sensorspenninger til digital melding: Digitale inngangssignaler behandles direkte av prosessoren. Analoge signaler konverteres først til et digitalt signal i A/D-omformeren. Som et eksempel tar vi den analoge spenningskurven til en turbotrykksensor:
ved tomgang er spenningen omtrent 1,8 volt;
ved akselerasjon stiger spenningen til nesten 3 volt.
Spenningsendringen kan ikke behandles direkte i prosessoren. Først må den målte spenningen konverteres til en desimalverdi (0 til 255).
Med et område fra 0 til 5 volt og en desimalverdi fra 0 til 255 (altså 256 muligheter). Et enkelt regnestykke viser at hvis vi deler 5 volt over 256 muligheter, kan det gjøres trinn på 19,5 mV (0,0195 volt).
Eksemplet ovenfor viste spenningsutviklingen kontra tid for en turbotrykksensor. Spenningskurven til en temperatursensor og gasspedalposisjonssensor er den samme, bare i en annen tidsramme: å varme opp kjølevæsken tar lengre tid enn å spole opp turboen.
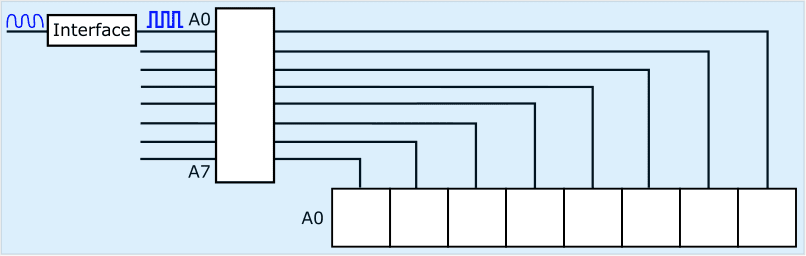
Tidligere i denne delen er det et bilde som viser en kategori av analoge signaler. Dette viser blant annet temperatursensor og gasspedalposisjonssensor. Den analoge spenningen konverteres til en 8-bits enhet med informasjon i A/D-omformeren. Mange prosessorer med flere inngangspinner har bare én A/D-omformer. Flere analoge signaler kombineres til ett signal ved hjelp av multipleksing.
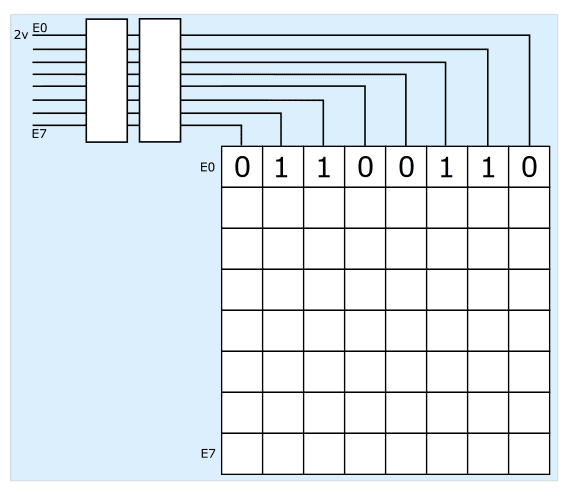
I dette eksemplet ser vi en A/D-omformer med åtte innganger. Det er en spenning på 0 volt på pinne 2. Pinne E1 til E7 kan forsynes med spenninger samtidig. Disse konverteres én etter én til en digital melding ved hjelp av multipleksing.
2 volt spenningen konverteres til en binær verdi. Med følgende formel kan vi konvertere den analoge spenningen til en desimalverdi, og deretter konvertere den til en binær verdi:
2v / 5v * 255d = 102d
Her deler vi inngangsspenningen (2v) med maksspenningen (5v) og multipliserer dette med maks desimalverdi (255).
Ved å gjøre en utregning eller utføre et pent triks, kan vi konvertere desimaltallet 255d til den binære verdien på 01100110. Se siden for dette: binær, desimal, heksadesimal.
8 bits A/D-omformer
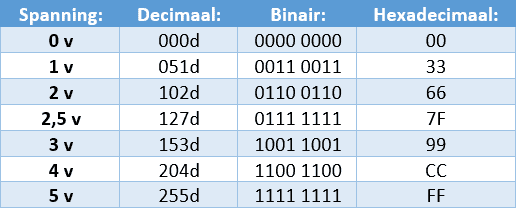
Følgende tabell viser desimalverdier, binære og heksadesimale verdier assosiert med forskjellige spenninger.
Når du leser live data, kan desimal-, binær- eller heksadesimalverdien til sensorsignalet vises.
Et spenningssignal på <0,5 volt (025d) regnes som en kortslutning til jord;
Hvis signalet stiger over 4,5 volt (220d), oversetter datamaskinen dette som en kortslutning med positiv.
Spenning i desimale, binære og heksadesimale verdier
Konvertering av pulsgeneratorsignaler til en digital melding: Signalene fra pulsgeneratorer, inkludert den induktive veivakselposisjonssensoren, er egentlig på-av-signaler som oppstår etter at tennene på pulshjulet har beveget seg forbi sensoren. Vekselspenningen til sensoren må først konverteres til en firkantbølgespenning før signalet presenteres for prosessoren.
På figuren ser vi en sinusformet vekselspenning på venstre side av grensesnittet. I grensesnittelektronikken blir denne vekselspenningen omdannet til en firkantbølgespenning. Denne blokkspenningen blir så lest av timeren/tellerblokken: når pulsen er høy, begynner telleren å telle, og slutter å telle når pulsen blir høy igjen. Antall tellinger er et mål på perioden. frekvensen til signalet.
Konvertering av pulsgeneratorsignal til digitalt signal med timer/tellerblokk
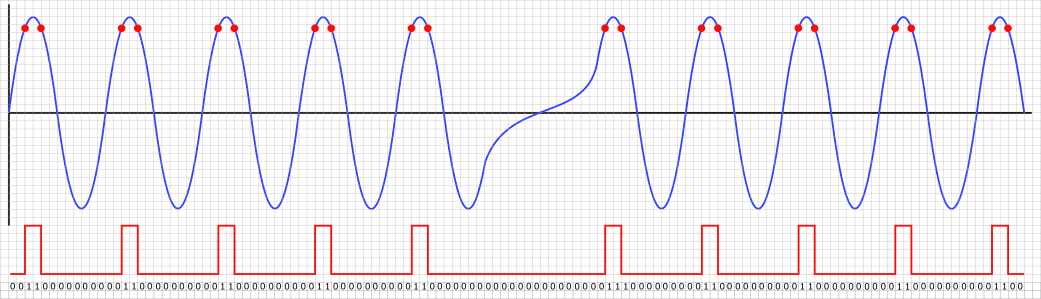
På bildet nedenfor ser vi et signal fra den induktive veivakselsensoren med røde prikker i de øvre flankene. De røde punktene er satt til en spenning for å øke (logisk 1) eller redusere (logisk 0) blokkspenningen. Forklaringen fortsetter under dette bildet.
Sinusformet vekselspenning og et digitalisert signal uten hysterese
Sensorspenningen er imidlertid aldri helt ren. Det vil alltid være en liten svingning i spenningsprofilen. I så fall kan grensesnittelektronikken feilaktig indikere dette som en logisk 0, mens den egentlig burde være en 1.
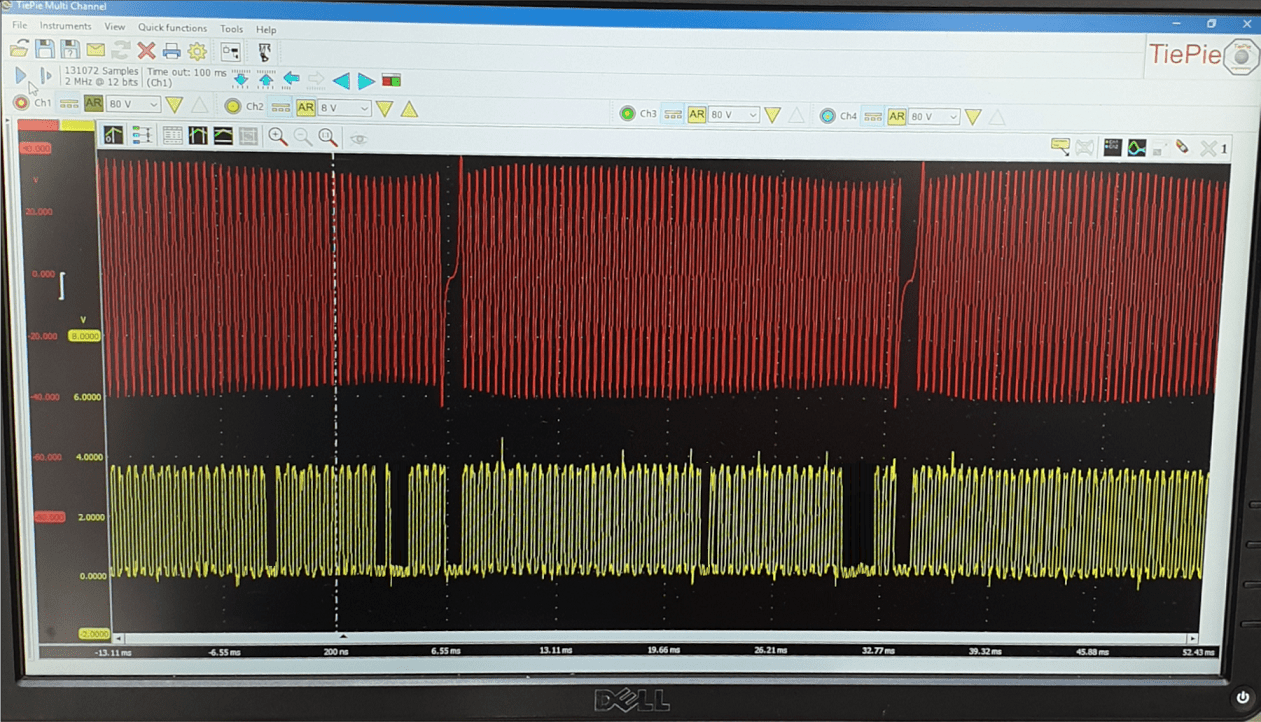
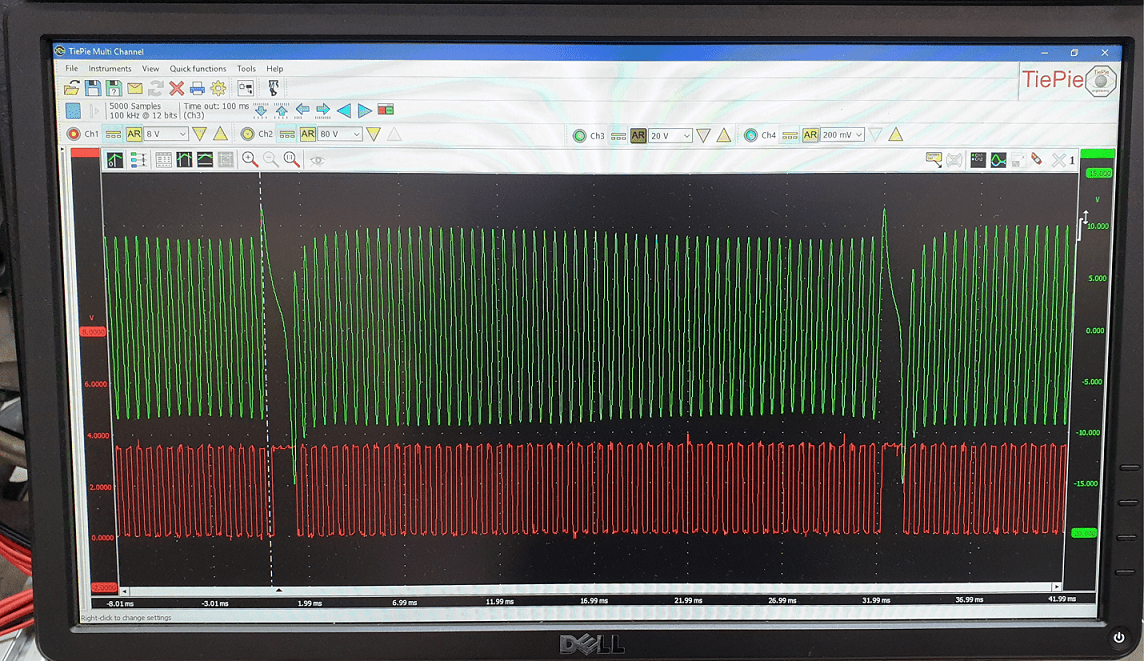
Omfangsbildet nedenfor ble tatt opp mens du kjørte det BMW Megasquirt prosjekt. Omfangsbildet viser digitaliseringen (gul) av det induktive veivakselsignalet (rødt). Bildet viser tydelig at det mangler pulser i gulblokksignalet, mens det i det øyeblikket ingen manglende tann passerer i veivakselsignalet.
Urent digitalt signal inneholder feil: dette mangler informasjon
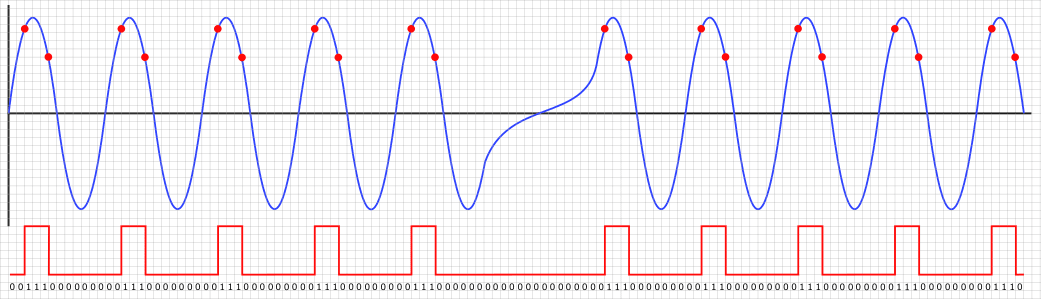
For å sikre at små svingninger i spenningsprofilen ikke forårsaker en feiltolkning av ECU, er det bygget inn en såkalt hysterese. Hysteresen er forskjellen mellom de stigende og fallende kantene til spenningsprofilen. På bildet nedenfor ser vi at de røde prikkene på de stigende kantene har en høyere spenning enn de røde prikkene på de fallende kantene. På denne måten kan vi være sikre på at små svingninger i signalet ikke påvirker den digitale konverteringen.
I første avsnitt hvor vi startet om konverteringen av pulssignalet til det digitale signalet, ble det allerede nevnt at frekvensen til signalet bestemmes på grunnlag av tiden mellom to stigende flanker av kvadratsignalet. I disse eksemplene kan det tydelig utledes at hysteresen påvirker bredden av kvadratsignalet, men har ingen innflytelse på tiden mellom de stigende kantene, og har derfor ingen innflytelse på frekvensen til signalet.
Digitalisert pulsgeneratorsignal med hysterese
Med en riktig innstilt hysterese blir det sinusformede signalet riktig konvertert til en brukbar firkantbølgespenning, med bare de flere logiske på stedene der den manglende tannen passerer.
Vær oppmerksom på at mens du satte opp MegaSquirt ECU, ble innstillingene endret, inkludert utløsning på de stigende og fallende linjene. Som et resultat, når du passerer den manglende tannen i det første eksemplet, er spenningen 0 volt og i omfangsbildet under er spenningen 5 volt.
Pulsgeneratorsignal med ren og korrekt firkantbølgespenning
Utgangssignaler: Utgangssignalene består av digitale av/på-pulser med et spenningsområde mellom 0 og 5 volt (TTL-nivå) med svært lav strøm. Aktuatorer krever imidlertid styring med høyere spenningsnivåer og strømmer. På/av-signalene kan pulsbreddemoduleres (PWM), hvor pulsbredden kan variere med en konstant frekvens.
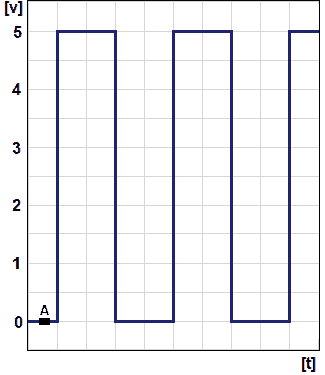
Følgende figur viser en firkantbølgespenning på TTL-nivå som funksjon av tid. De plikt syklus av dette PWM-signalet er 50 %.
Drivere er nødvendig for å kontrollere aktuatorer. Med det digitale utgangssignalet kan den nødvendige strømmen oppnås med en driver. I neste avsnitt vil vi diskutere driverne.
Eksempel: PWM-signal
Vi finner drivere i hver ECU og i noen aktuatorer som DIS tenningsspoler. En driver kalles også et utgangstrinn eller krafttransistor. Driveren gjør det mulig å konvertere utgangssignaler på TTL-nivå: 0 til 5 volt, med en lav strøm på 1 mA fra ECU til spenninger opp til 14 volt og strømmer opp til ca. 10 A.
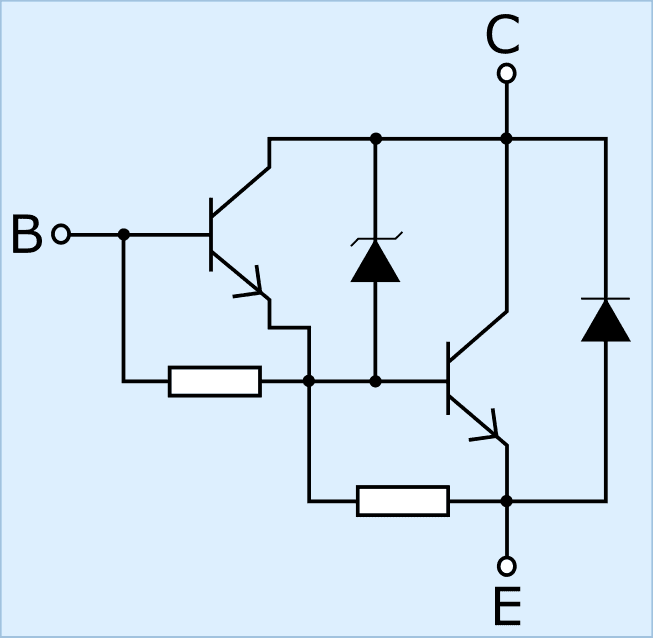
En sjåfør kan koble til flere transistorer inneholde. Vi kaller en slik transistor en "Darlington transistor". Følgende bilder viser følgende kretser:
Skjematisk av en Darlington-krets med to transistorer for tenningsspolekontrollen (kilde: datablad BU941ZR).
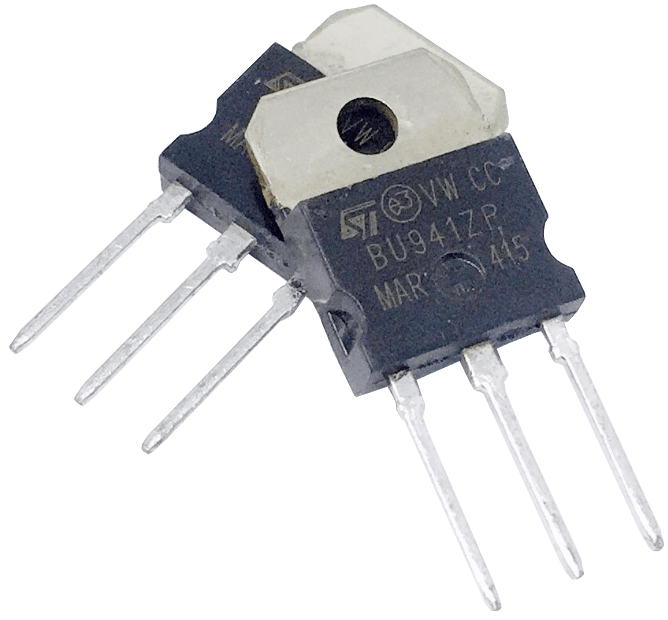
To transistorer, hver med en Darlington-krets (BU941ZR)
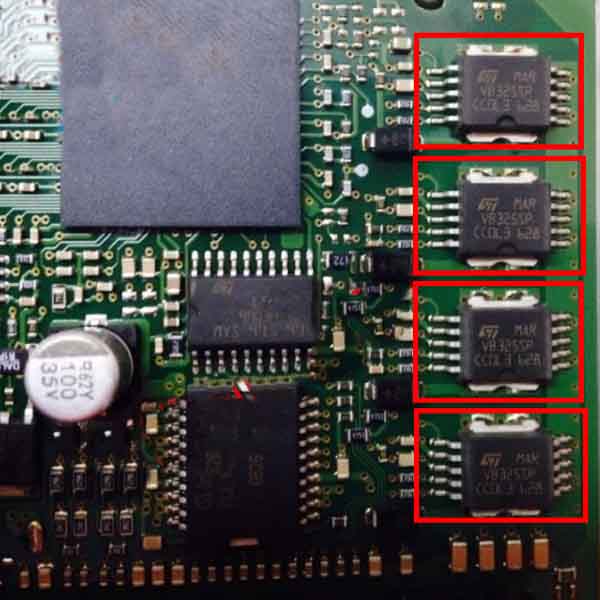
Driver-ICer med Darlington-kretser og ekstra elektronikk for blant annet temperaturbeskyttelse og tilbakemelding til mikroprosessoren.
1. Darlington krets
2. Darlington-transistorer (2x)
3. Driver-ICer med flere Darlington-kretser
På siden: kontrollmetoder for aktuatorer styring av passive, aktive og intelligente aktuatorer ved hjelp av en (effekt)transistor eller FET diskuteres mer detaljert.