Emner:
- introduksjon
- AC elektrisk motor (synkron, med permanente magneter)
- AC-styring av synkronmotoren
- AC elektrisk motor (asynkron, ekornburmotor)
- Effektivitetskart over den synkrone og asynkrone elektriske motoren
Forord:
En elektrisk motor brukes til å kjøre et hybrid eller helelektrisk kjøretøy. Den elektriske motoren konverterer elektrisk energi (fra batteriet eller rekkeviddeforlengeren) til bevegelse for å drive hjulene. I tillegg kan den elektriske motoren også konvertere kinetisk energi til elektrisk energi ved bremsing av motoren: regenerativ bremsing. I så fall fungerer den elektriske motoren som en dynamo. På grunn av disse to funksjonene kaller vi også den elektriske motoren for en "elektrisk maskin".
Alternativene for å plassere den elektriske motoren i et hybridbil er:
- På forbrenningsmotoren, hvor overføringen oppnås via et multibelte eller direkte via veivakselen;
- Mellom motoren og girkassen: inngangsakselen til girkassen drives av den elektriske motoren;
- Integrert i girkassen;
- På differensialen;
- Ved hjulnavene (navmotor).
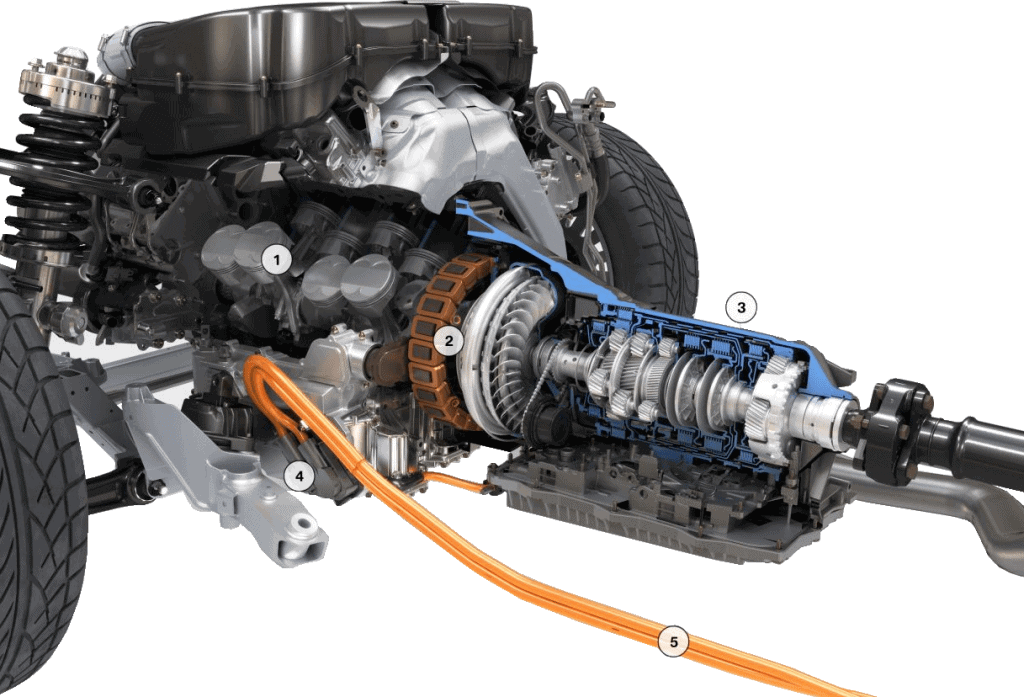
Elmotoren til en helelektrisk bil er ofte montert på bakakselen. Bildet nedenfor viser den elektriske motoren med omformeren i et sylindrisk hus og sluttdrift av en Tesla.

AC elektrisk motor (synkron, med permanente magneter):
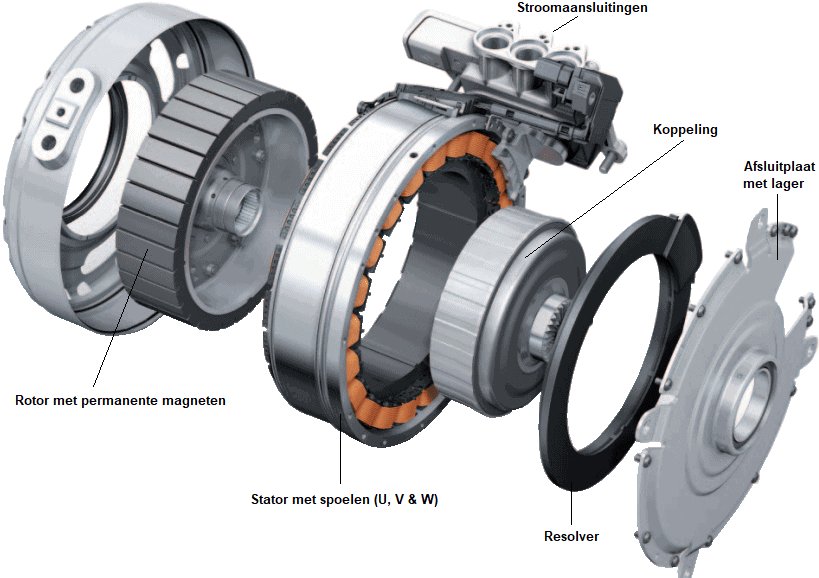
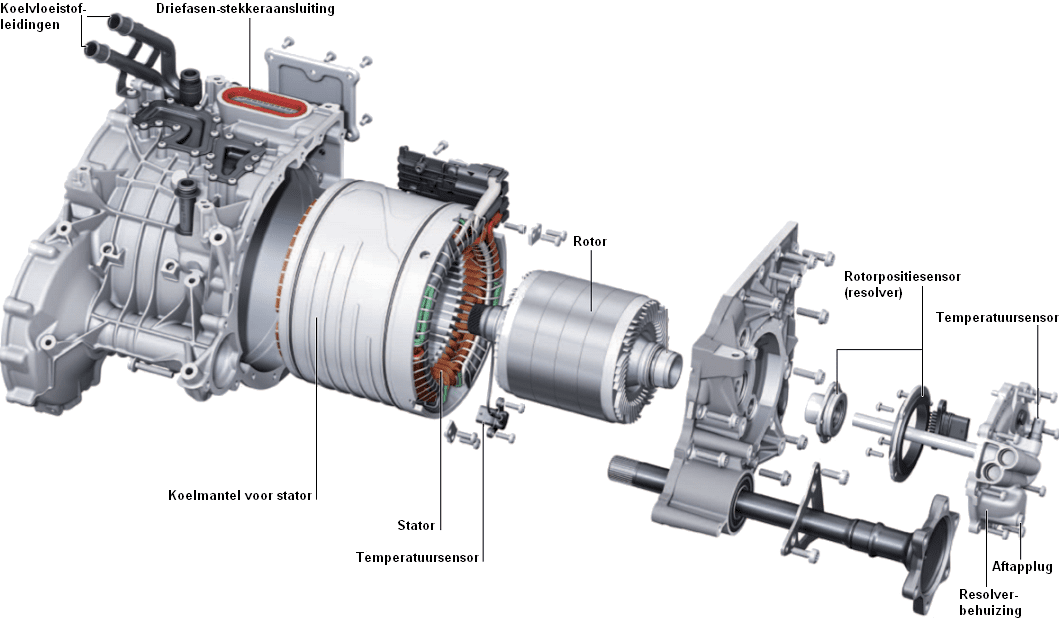
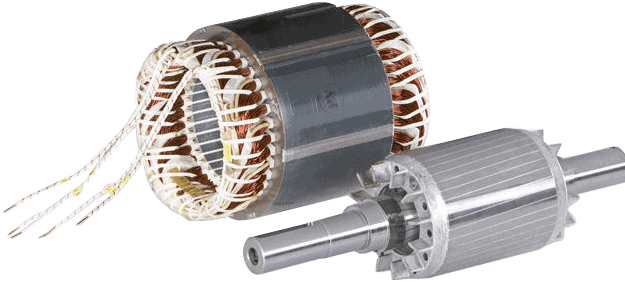
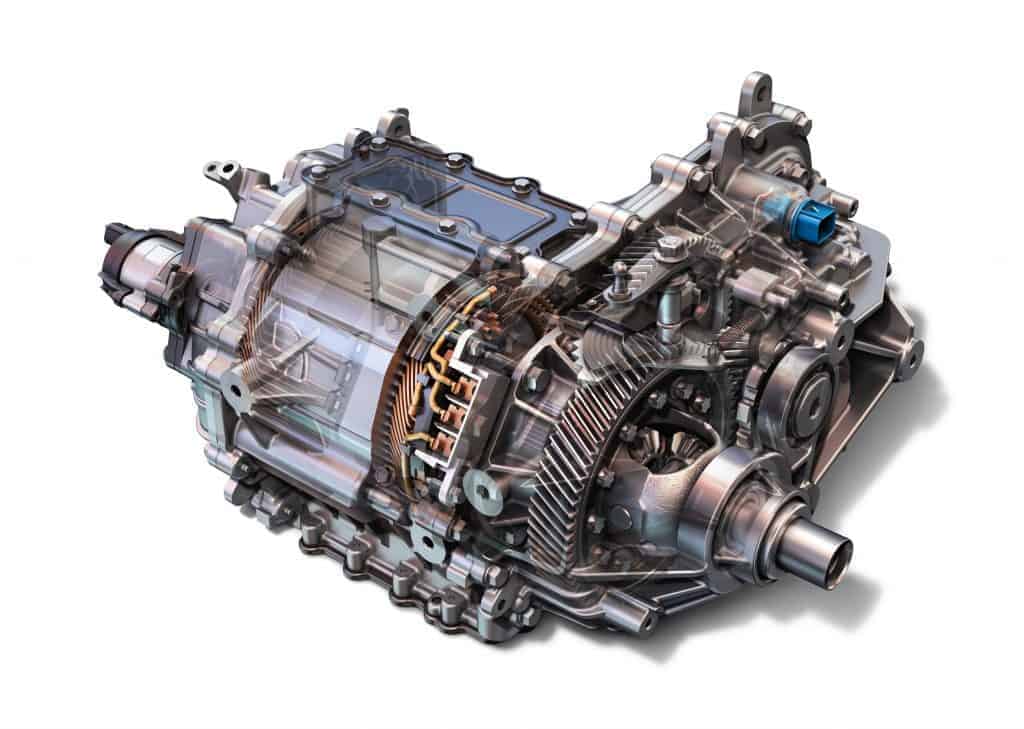
Følgende bilde viser delene til en Audi (synkron) elektrisk motor. Denne typen brukes i hybridvariantene av A6 og A8. Vi vil kort liste opp komponentene. Disse komponentene er beskrevet i detalj i de følgende avsnittene.
Rotoren med permanentmagneter vil begynne å rotere som følge av en endring i magnetfeltet i statoren. Rotoren er koblet til clutchen, som kan koble til eller fra forbrenningsmotoren og den elektriske motoren (i forbindelse med en clutch (ikke vist)) under forskjellige driftsforhold. Rotorens posisjon bestemmes av resolver målt: disse dataene er viktige for at IGBT-driverne skal kontrollere statorspolene til rett tid.
Den elektriske motoren med permanentmagneter kan styres av både DC (likespenning) og AC (vekselspenning).
Synkronmotoren er en av de mest brukte elektriske motorene i hybrid- eller helelektriske kjøretøy. Denne typen elektrisk motor består av en stator med viklinger og en rotor med flere permanente magneter. Rotoren roterer med samme hastighet som statorens magnetiske felt. Synkronmotoren kan styres som følger:
- AC: styrt av et sinusformet signal (vekselstrøm).
- DC: styrt med kvadratisk eller trapesformet signal (likestrøm)
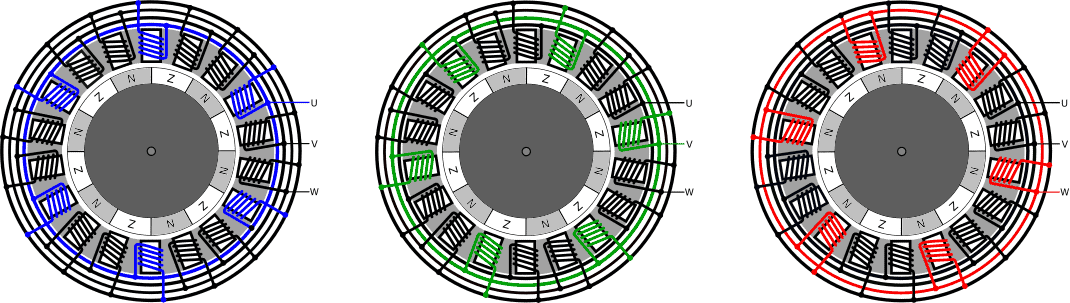
Statoren til synkronmotoren er bygd opp av tre statorspolegrupper: U, V og W. Hver gruppe inneholder tre sett med seks spoler koblet parallelt som er fordelt over hele statorens omkrets. Hver tredje spole tilhører samme serie.
- U-spoler: blå
- V-spoler: grønn
- W spoler: rød
Rotoren inneholder flere permanente magneter. Ved å vekselvis aktivere spoler i statoren, skapes et roterende magnetfelt. Rotoren følger rotasjonsfeltet og roterer derfor.
AC-styring av synkronmotoren:
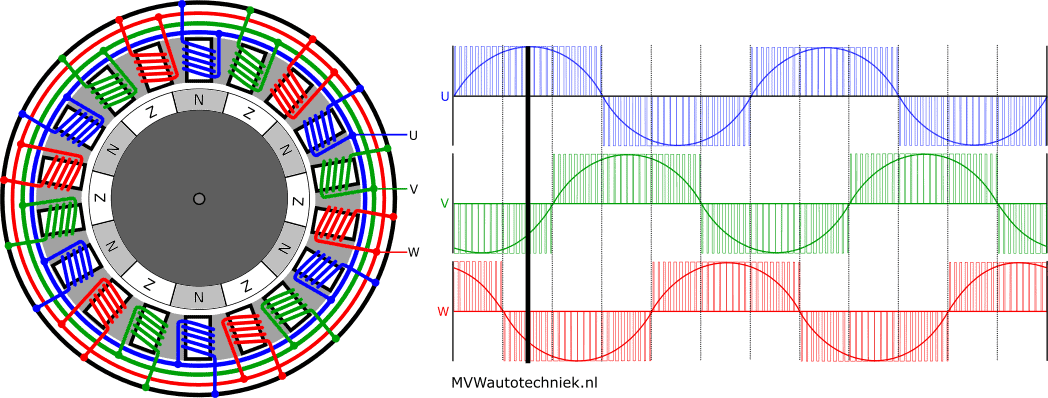
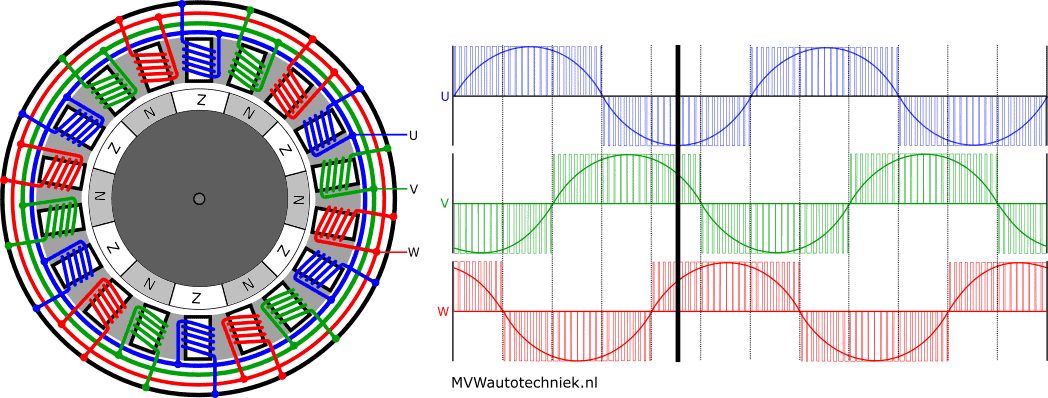
AC-kontrollen bruker frekvensstyrt kontroll eller sinusformet kommutering. Statorspolene leveres med en alternerende trefase sinusbølgespenning for å rotere rotoren.
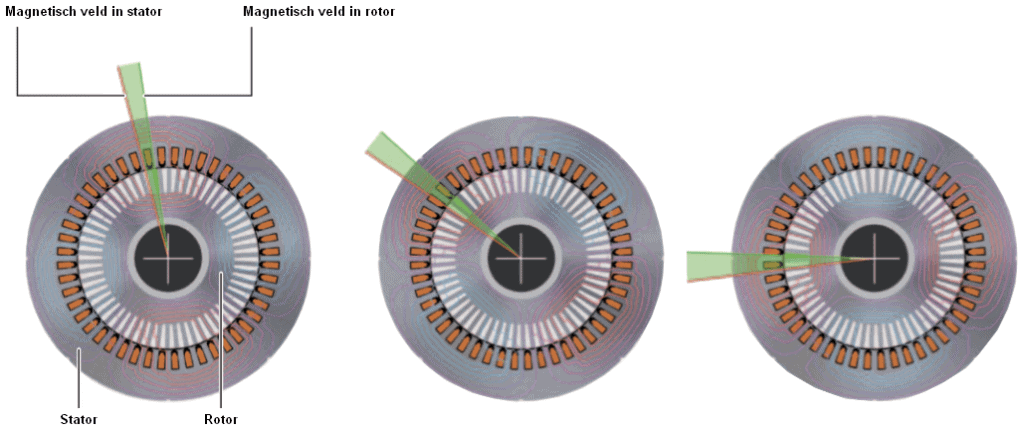
Bildet nedenfor viser rotorposisjonen med en maksimal eksitert U-spole. Som et resultat av magnetfeltet har nordpolene plassert seg rett overfor de energiserte U-spolene. Markøren i grafen ved siden av den elektriske motoren indikerer kontrollen av spolene i det øyeblikket.
Til din informasjon: rotoren i forklaringen roterer ved styring av statorspolene rettsom.
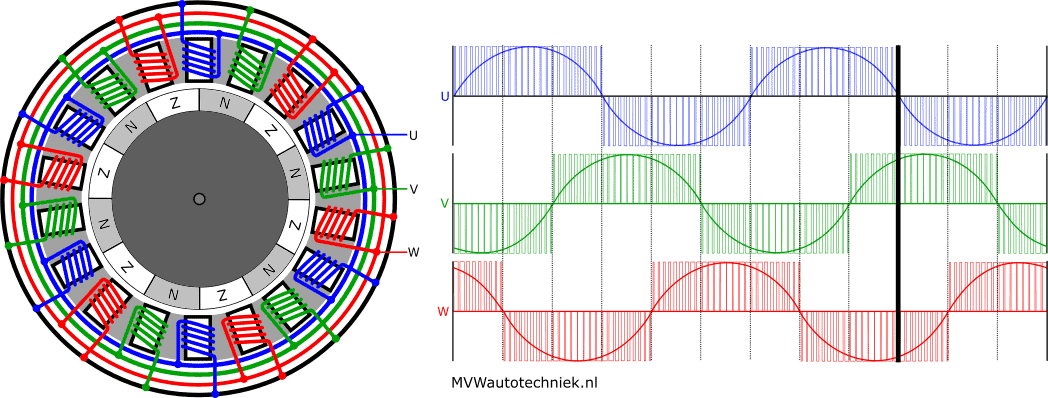
I det følgende bildet er sinusbølgen, det vil si vekselstrømmen gjennom U-spolen, maksimalt negativ. Under denne kontrollen er rotorens sørpoler rett overfor de energiserte (U) statorspolene.
Det er faktisk et lite luftgap mellom nord- og sørpolen til rotoren. Under endringen fra sør- til nordpolen endres strømretningen i U-spolen. Lengre:
- Strømmen gjennom V-spolen (grønn) er nesten maksimalt positiv; nordpolen er også nesten motsatt spolen.
- Strømmen gjennom W-spolen har vært maksimalt negativ og øker. Sydpolen har rotert forbi spolen.
For å gi et inntrykk av hvordan strømmen flyter, viser animasjonen under rotorrotasjonen på grunn av vekselstrømmen.
AC elektrisk motor (asynkron, ekornburmotor):
Ekornburet eller den elektriske motoren for kortslutningsanker er en asynkronmotor. Forskjellen mellom synkronmotoren med permanente magneter og asynkronmotoren er i rotoren: dette er en myk jerntrommel med ledere i lengderetningen. Rotoren går asynkront med statoren, noe som betyr at det er en hastighetsforskjell mellom rotoren og statorens magnetiske hastighet. Statoren er nøyaktig den samme.
Rotoren til den asynkrone elektriske motoren består av kortsluttede spoler; U-, V- og W-spolene er koblet til hverandre på den ene siden. Når rotoren er i statorens rotasjonsfelt, dannes det en induksjonsspenning i rotorspolene. Fordi rotorspolene er kortsluttet med hverandre, flyter det en strøm gjennom dem. Denne strømmen får rotoren til å generere et magnetfelt, og skaper et dreiemoment. Fordi driften av den asynkrone elektriske motoren er basert på induksjonsloven, kaller vi den også en induksjonsmotor.
Det leverte dreiemomentet påvirker glidningen mellom det roterende magnetfeltet i statoren og rotorens hastighet.
Asynkronmotoren har en rekke fordeler og ulemper sammenlignet med synkronmotoren.
fordeler:
- relativt enkel, robust og rimelig rotor;
- høyt dreiemoment ved lav hastighet.
ulemper:
- lavere effekttetthet (per masse) og effektivitet (effektivitet). Strømmene i de kortsluttede rotorspolene gir opphav til ytterligere rotortap;
- hastigheten kan ikke kontrolleres nøyaktig fordi den avhenger av belastningen. I seg selv trenger ikke dette å være en ulempe: med et godt kontrollsystem kan hastigheten til asynkronmotoren også justeres;
- høy startstrøm.
Rotorposisjonen og hastigheten til asynkronmotoren måles med en rotorposisjonssensor. Hallsensorer gir ofte minst fire pulser per omdreining av rotoren for å overføre rotorens posisjon og hastighet. Vi kaller ikke denne typen rotorposisjonssensor for en resolver, slik tilfellet er med synkronmotoren.
I motsetning til synkronmotoren er ikke rotorposisjonssensoren nødvendig for å vite rotorposisjonen ved stillestående. Rotorposisjonen er viktig under rotasjon: man må passe på at slipingen mellom det magnetiske rotasjonsfeltet og rotoren ikke blir for stor. Når rotasjonsfeltet beveger seg for fort, kan det oppstå en situasjon der rotoren plutselig ønsker å snu i den andre retningen. Kreftene som oppstår kan være katastrofale for de mekaniske og elektriske komponentene.
Noen produsenter velger også å bruke en asynkronmotor resolver søker. Årsaken er ukjent for meg. Uansett er resolveren ekstremt nøyaktig både når du står stille og mens du løper, noe som kan være til fordel for den presise kontrollen.
Effektivitetskart for den synkrone og asynkrone elektriske motoren:
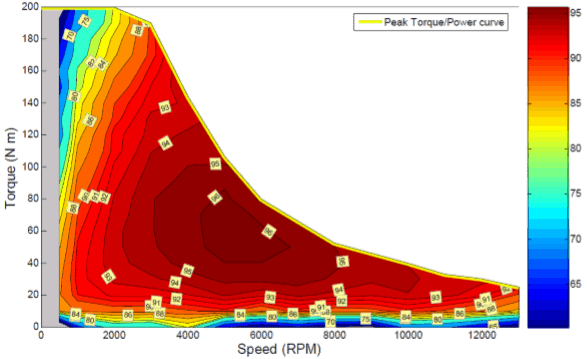
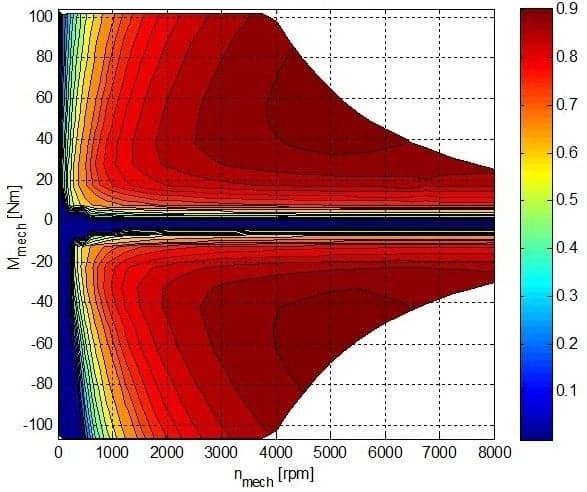
Bildene nedenfor viser effektiviteten til den synkrone elektriske motoren (venstre) og den asynkrone elektriske motoren (høyre).
- Den synkrone elektriske motoren er svært effektiv. Effektiviteten er over 90 % i et stort område, med toppverdier på opptil 96 %. Fra 2000 rpm oppstår feltsvekkelse, noe som fører til at det maksimale dreiemomentet reduseres.
- Asynkronmotoren har betydelig lavere virkningsgrad enn synkronmotoren ved lavere hastigheter.
Relaterte sider: