Emner:
- ESP-general
- Andre navn for ESP
- Understyring
- Opprørt
- Styrevinkelsensor
- Tverrakselerasjonssensor (G-sensor)
- Giemomentsensor (giresensor)
- Bremsetrykksensor
ESP generelt:
ESP er en forkortelse av Electronic Stability Program og fungerer i kombinasjon med ABS og ASR. Hvis kjøretøyet er utstyrt med ABS (Anti-lock Braking System) og ASR/ASC (Anti-Slip Regulation / Control), kan ESP-systemet legges til ved hjelp av en rekke ekstra sensorer og en programvarejustering. Komponentene som hjulhastighetssensorene og ABS-pumpen/kontrollenheten brukes også til ESP-systemet. ESP-systemet regulerer også reduksjonen av motoreffekten; ved å stenge gassen mer, eller ved å slå av tenningen.
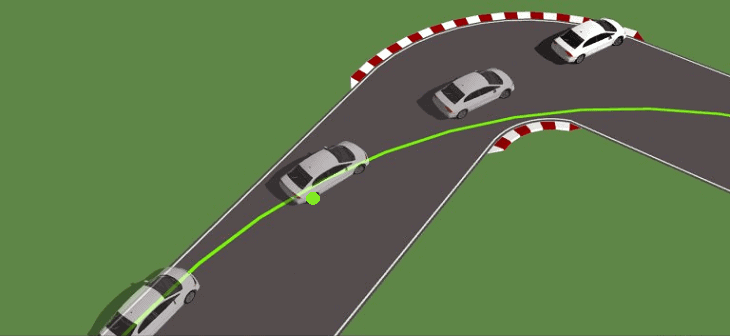
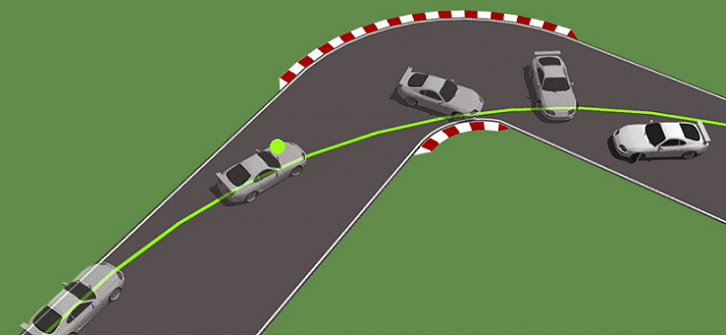
Formålet med ESP-systemet er å forbedre svingadferd (under- og overstyring). Dette gjelder blant annet situasjoner der det settes på bremser i en sving, eller når det foregår en unnamanøver. ESP-systemet bremser ett hjul på kjøretøyet, slik at normale styreegenskaper gjenopprettes. Nedenfor er de 2 situasjonene der hjulet angitt i grønt er bremset. Ved å bremse vil kjøretøyet følge den grønne linjen, i stedet for å komme ut av kontroll. Ulike nødvendige ESP-komponenter er beskrevet nederst på denne siden.
Andre navn for ESP:
Bilprodusenter bruker ofte egne navn for ESP for sine modeller, selv om operasjonen er den samme. Disse andre navnene er gitt for å få systemet til å virke "mer luksuriøst" enn standard ESP. Eksempler på dette er:
- ASC + T: Automatisk stabilitet og trekkraft (gammel generasjon BMW fra før 1996)
- DSC: Dynamisk stabilitetsprogram: BMW, Jaguar, Land Rover, Mazda, Mini
- DSTC: Dynamic Stability and Traction Control (Volvo)
- ESP: Elektronisk stabilitetsprogram (Alfa Romeo, Audi, Cadillac, Chevrolet, Chrysler, Citroen, Fiat, Ford, Hyundai, Jeep, Kia, Mercedes, Mitsubishi, Nissan, Opel, Peugeot, Renault, Saab, Seat, Skoda, Smart, Suzuki , Volkswagen
- PSM: Porsche Stability Management (Porsche)
- VDC: Vehicle Dynamic Control (Alfa Romeo)
- VDCS: Vehicle Dynamic Control System (Subaru)
- VSC: Stabilitetskontroll for kjøretøy (Lexus, Toyota)
- VSA: Stabilitetsassistent for kjøretøy (Honda)
Understyring:
Understyring oppstår når fordekkene ikke lenger har tilstrekkelig grep på veibanen. Bilen vil gjøre en slakere sving enn beregnet, så den vil ha større tendens til å gå rett. Forhjulene vil derfor gli til utsiden av svingen. Understyring kan elimineres for å sikre at forhjulene har tilstrekkelig grep på veibanen igjen. For å oppnå dette kan du bruke mindre gass eller styre mindre. Enda mer styring hjelper ikke mot understyring, det kan til og med gjøre det verre fordi hjulene bare vil ha mindre veigrep. De fleste bilprodusenter justerer chassiset på en slik måte at bilen har en tendens til å understyre fremfor å overstyre. Årsaken er at den gjennomsnittlige sjåføren umiddelbart slipper gassen i en slik situasjon (som kan være løsningen som gir bilen grep igjen).
Opprørt:
Overstyring oppstår når bakdekkene ikke lenger griper veibanen. Bilens bakdekk vil gli mot utsiden av svingen. Den bakre vil da forbikjøre fronten, noe som får kjøretøyet til å rotere om sin akse. Overstyring kan korrigeres ved å motstyre og bremse ned for bakhjulsdrevne biler (f.eks. BMW) og litt mer gass for forhjulsdrevne biler (f.eks. Volkswagen). Ofte, spesielt innen motorsport, brukes overstyring bevisst for å kjøre gjennom en svingkombinasjon enklere og raskere. I et ekstremt tilfelle kalles denne formen for opprørt "drift". Overstyring er generelt farligere enn understyring, fordi de fleste sjåfører har mindre sannsynlighet for å kunne korrigere det. Derfor justeres chassiset mer mot "understyring" når man designer bilen, fordi det er lettere å korrigere.
Styrevinkelsensor:
Rattvinkelsensoren er montert på rattstammen. Dette kan være i nærheten av styrestativet, men også i interiøret mellom blinklys/viskerespakene, som vist på bildet til høyre. Dette er rattstammebryterne fra en BMW.
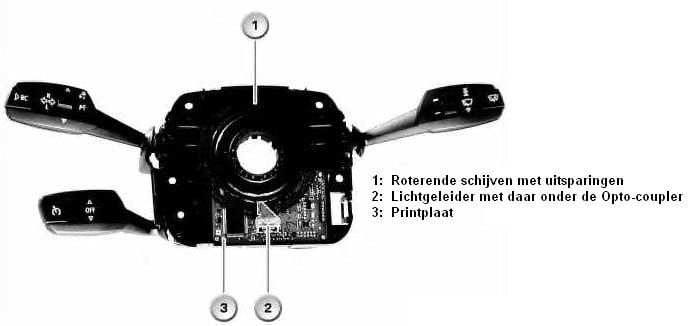
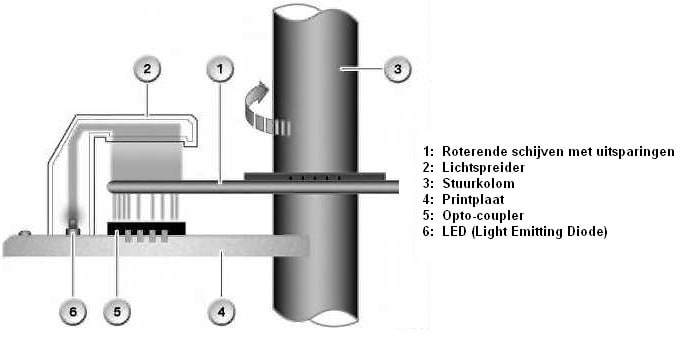
Styrevinkelsensorens oppgave er å måle rotasjonsvinkelen til rattet. Denne sensoren bruker en eller flere optokoblere som måler lystransmisjonen til de roterende skivene. Lysgapene er forskjellige på hvert sted på en roterende skive, slik at den nøyaktige posisjonen til rattet kan gjenkjennes. Alle utsparingene i skivene skaper et asymmetrisk firkantsignal. Optokobleren kan konvertere et lyssignal til en spenning som deretter sendes videre til kontrollenheten.
Tverrakselerasjonssensor (G-sensor):
Sideakselerasjonssensoren (også kalt G-sensoren til G-kreftene) plasseres så mye som mulig i midten av bilen. Ved svinger forskyves den bevegelige platen (se bildet nedenfor, nummer 2) mellom kondensatorene (1). Kondensatorene har en spenning på 5 volt. Når platen er i midten (dvs. når bilen kjører rett) er spenningen på begge kondensatorene 2,5 volt. Når bilen gjør en sving (i tilfellet med bildet til venstre), forskyves platen til den ene siden på grunn av sentrifugalkraften og sentripetalkraften.
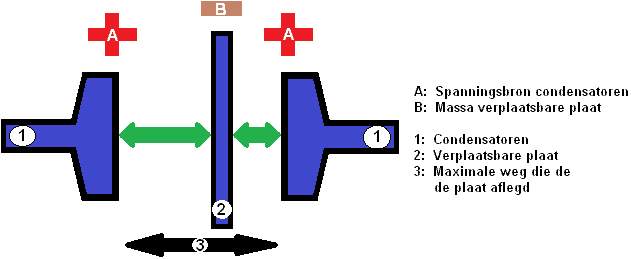
Når platen skifter, synker kapasitansen til høyre kondensator. Dette blir nå ikke 2,5 Volt men for eksempel 1,5V. ESP-kontrollenheten kjenner igjen forskjellen mellom de to kondensatorene og kan ut fra dette bestemme hvor stor sentrifugalkraften eller sentripetalkraften er (dvs. hvor skarp svingen er laget. På denne måten kan det avgjøres om bilen for eksempel overstyrer) . Verdiene til denne sideakselerasjonssensoren brukes til å sammenligne dataene fra hjulhastighetssensorene og bestemme om ESP-systemet skal gripe inn.
Giemomentsensor (giresensor):
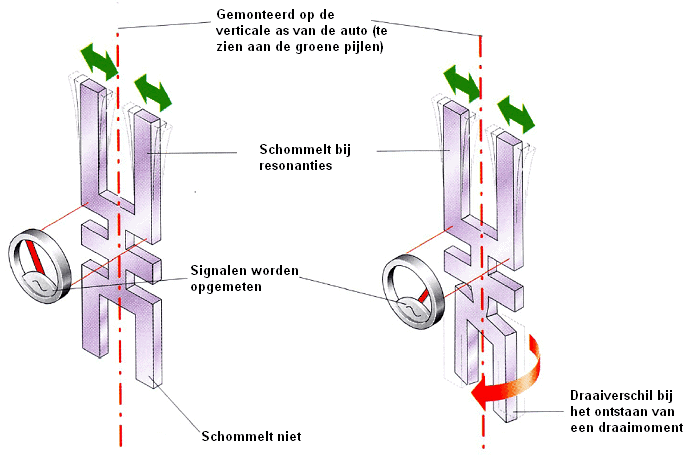
Girningsmomentsensoren, også kalt «Giringssensor» på engelsk, plasseres så mye som mulig i midten av bilen sammen med sideakselerasjonssensoren. Sensoren gir data som ESP-systemet trenger. Giringsmomentsensoren registrerer kjøretøyets tendens til å rotere rundt den vertikale aksen. Verdien av denne målingen kalles rotasjonshastigheten og vises i grader per sekund.
Sensoren består av to stemmegafler. Den øvre stemmegaffelen er laget for å vibrere (resonans) ved 11000 Hz (11kHz) med en vekselspenning og roterer når kjøretøyet kjører gjennom en sving. Jo skarpere bøyningen er, jo mer er den nedre stemmegaffelen vridd i forhold til den øvre gaffelen. Prinsippet er basert på gyroskopiske krefter (Coriolis-kraft). Når den roterende delen flyttes ut av posisjon med torsjon, skapes gyroskopiske krefter. Derav navnet yaw moment sensor.
På grunn av torsjonen genererer et piezoelement en spenningsforskjell som måles av kontrollenheten. Spenningen som genereres varierer mellom 0 og 5 volt. I hvilestilling (når ingen rotasjon er registrert) avgir sensoren 2,5 volt.
Bremsetrykksensor:
Separate hydrauliske trykksensorer er også lagt til bremsesystemet (i begge kretser), som kan sees på bildene nedenfor. I eldre biler er disse sensorene plassert i bremselinjene. I dag er bremsetrykksensorene vanligvis innebygd i den hydrauliske enheten til selve ABS-systemet. Denne enheten er ofte synlig under panseret. Alle hydrauliske bremseledninger er koblet til denne.

