Sujeten:
- Zeh eraus an der Béi
- Berechnung vun der presentéiert Wénkel
Zeh eraus an der Béi:
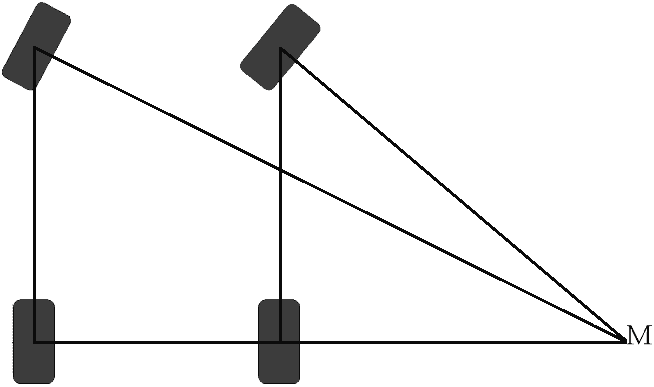
Déi viischt Rieder steieren net am selwechte Wénkel beim Corner. Dat banneschten Rad wäert ëmmer e "méi schaarf" Tour maachen wéi dat baussenzegt Rad. D'Bild weist firwat dat esou ass.
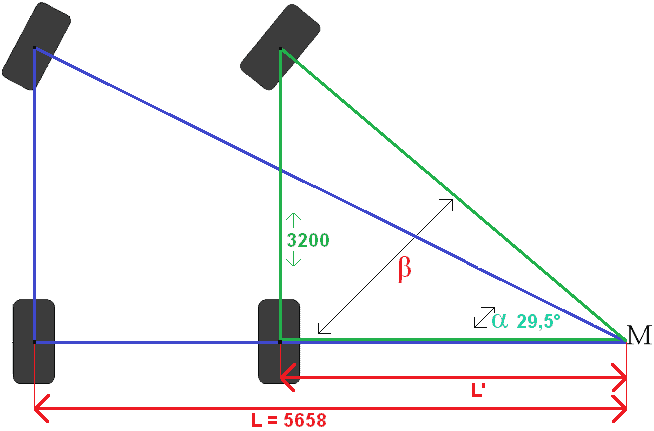
D'Bild weist datt d'Linnen vun de viischte Rieder am Wénkel M ophalen. De Wénkel M ass de gemeinsame Pivotpunkt vu béide Rieder. Wann d'Rieder am selwechte Wénkel dréinen (d'Rieder sinn allebéid genee an der selwechter Positioun), wäerten d'Linnen vun de Rieder och parallel matenee bis onendlech lafen. Si fannen ni de gemeinsame Pivotpunkt M. Dofir wäerten d'Lenkungseigenschaften an dëser Situatioun ganz schlecht sinn. Dëse ganze Prinzip gëtt "Toe-out an der Béi" genannt. All modern Autoe gi mat dëser Feature gebaut.
Op glatem Flächen, z.B. um Buedem an der Parkgarage, héiert een d’Pneuen beim dréinen. Dat ass wéinst dësem Prinzip. Den banneschten Rad, deen an engem méi schaarfe Wénkel ass wéi de baussenzege, wäert e gewësse Grad vu Rutsch erliewen. Dëst gëtt e Lenkfehler genannt. Méi Informatioun iwwer de Lenkfehler (an eng Grafik) fannt Dir op der Säit Lenkungsfehler.
Dës Säit erklärt wéi d'Input Wénkel (an Grad) souwuel virun Rieder berechent mat enger Zuel vun Donnéeën.
Berechnung vun de proposéierte Winkelen:
Fir déi aginn Winkelen ze berechnen, sinn déi folgend Gefierdaten erfuerderlech:
- Streck Breet
- Radbasis
- Dréikrees Duerchmiesser
- Lenknuckle Distanz (op dëser Säit halen mir d'Lenknuckle Distanz gläich wéi d'Streckbreet)
- Pneuengréisst (ofhängeg vun der Berechnung. Op dëser Säit gëtt d'Pneuengréisst fir Berechnunge benotzt, awer d'Berechnunge kënnen och bis zu de Bumperecker gemaach ginn. Allerdéngs kommen nach méi Ecker dobäi).
| Streck Breet = 1600mm | Radbasis = 3200 mm |
| Dréikrees Duerchmiesser = 13,225m | Knöchelabstand = Spuerbreet = 1600 mm |
| Pneuen Gréisst = 225 | L an L' = onbekannt |
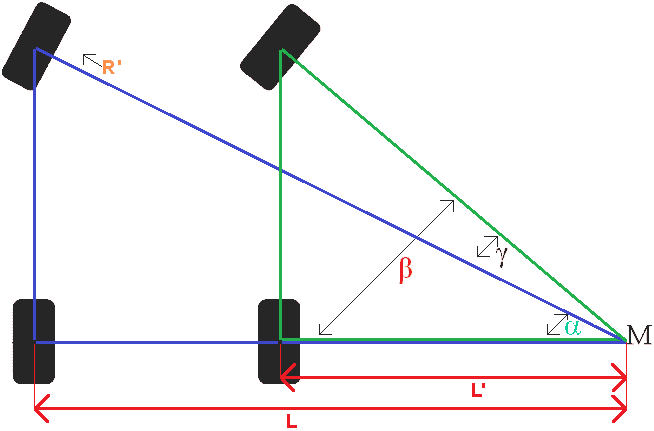
Erklärung vun de Symboler:
α = Alpha
β = Beta
γ = Gamma
Dës Buschtawen kommen aus dem griichesche Alphabet a ginn dacks fir Wénkelrechnungen benotzt.
L = Längt
L' = L mat "Akzent" als Zousatz, wat dacks mathematesch benotzt gëtt. Et hätt och vläicht L2 gesot. Zum Beispill, en 3. L hat zwee Akzenter: L".
Dat selwecht gëllt fir R".
D'Wénkel Alpha, Beta a Gamma leien um Punkt M.
Wénkel Alpha + Gamma = Wénkel Beta.
De ganze Wendekrees ass 13,225 Meter. R ass de Radius, also ass den hallwe Wendkrees (6612,5). An der Figur gëtt R' uginn. Dëse R 'ass net e fixe Fakt. Dëst muss berechent ginn andeems d'Halschent vun der Bandbreedung subtrahéiert. Eng aner Manéier ass d'Distanz vun der Lenknuckle ze subtrahéieren, awer op dëser Säit benotze mir: Streckbreet = Lenknuckle Distanz. Déi einfach Berechnung follegt:
R = 6612,5 mm
R' = R - hallef Bandbreed
R' = 6612,5 – (225:2)
R' = 6612,5 - 112,5
R' = 6500 mm
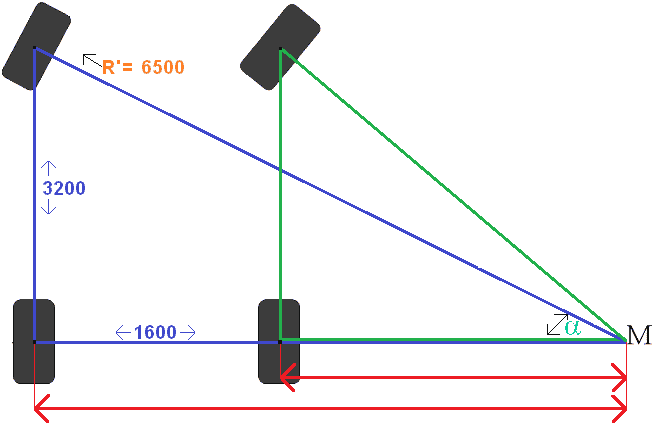
Mir fëllen den R' am Bild aus. Mir berechnen dann de Wénkel sin α (Sinus Alpha) mat der Sinusregel. Mir berechnen dann déi verbleiwen Wénkel mam Tangent an dem Pythagorean Theorem.
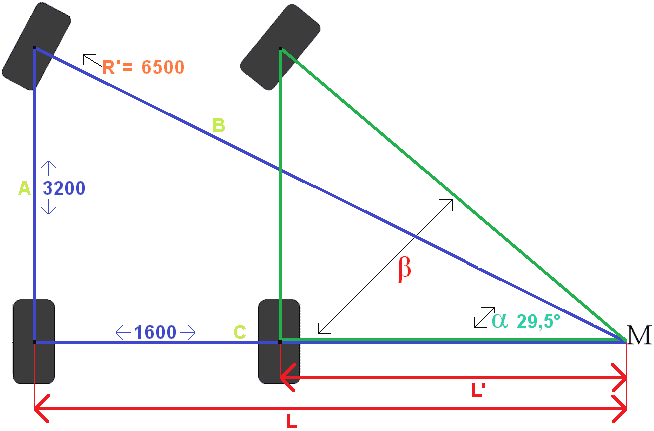
Wénkelberechnung mam Sinus:
Sin α = Géigewier Säit: Schräg Säit
Sin α = Wb : R'
Sin α = 3200: 6500
Sin α = 0.492
Inv Sin α = 29,5°
Erklärung vun der Berechnung:
Mir wëllen Sin α berechnen. De Sinus gëtt op der Géigendeel Säit vun der schräifender Säit gedeelt (mnemonic: SIN = SOS).
Wb = Radstand = 3200 mm. Mir berechent virdrun R' = 6500mm.
Mir deelen dat dann zesummen; dann hu mir Sin α = 0.492. Fir dann dës Zuel an e Wénkel ze konvertéieren, gitt de Sin-1 Knäppchen am Rechner (normalerweis fir d'éischt op de Shift Knäppchen an dann de Sin Schlëssel) gefollegt vun der 0.492, oder den ANS Knäppchen. Elo kënnt de Wénkel vun 29,5 Grad an Siicht.
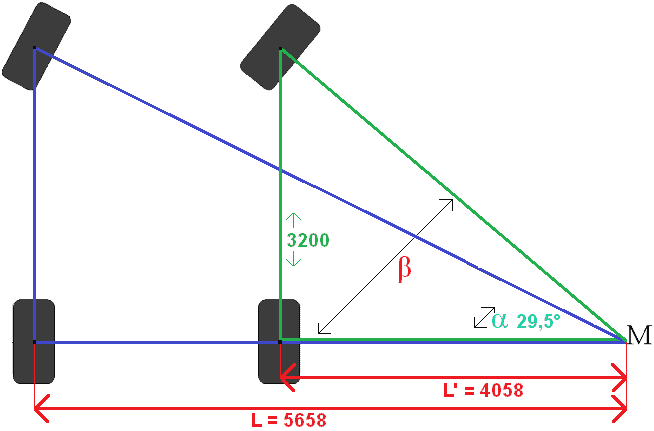
Sin α ass elo bekannt. Elo wëlle mir eigentlech Tan β berechnen, awer da brauche mir d'Längt L'. Dëst muss als éischt berechent ginn. Mir benotzen dofir d'Äntwert aus der Berechnung L' fir spéider Tan β ze berechnen.
L' = L - Streck Breet.
Mir berechnen L mat dem Pythagorean Theorem. Déi 2 Säite vum Dräieck si bekannt (6500 an 3200). Déi aner Säit vum 1600 ass d'Streckbreet déi vu Pneu zu Pneu leeft, also zielt et net. Mir wäerten déi ënnescht Säit berechnen, déi vum lénksen hënneschte Pneu bis zum gemeinsame Punkt M leeft. D'Berechnung betrëfft also de komplette bloen Dräieck.
De Pythagorean Theorem gesäit esou aus:
A^2 + B^2 = C^2. (D'Zeeche ^ ass e Symbol fir "Kraaft". Also steet A quadrat + B quadrat = C quadrat. Mir formuléieren et hei liicht anescht.
Mir nennen d'Längt 3200 A, 6500 nennen mir B an déi ënnescht onbekannt Säit nennen mir C:
C^2 = 6500^2 - 3200^2
C^2 = 42250000 - 10240000
C^2 = 32010000^2
Fir de Quadrat ze eliminéieren, hu mir d'Quadratwurz vun der Zuel.
C^2 = √32010000
C = 5658 mm.
Säit C ass tatsächlech Längt L.
Elo kann L' berechent ginn. Déi voll Längt L an d'Streckbreed sinn bekannt, sou datt déi zwee einfach vuneneen ofgezunn kënne ginn:
L' = L - Streck Breet
L' = 5658 - 1600
L' = 4058 mm
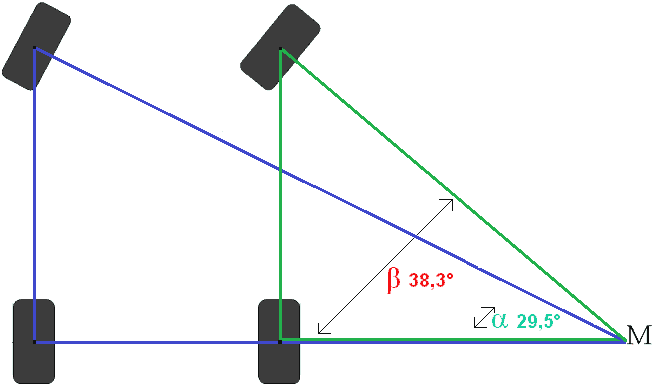
Elo sinn d'Wb a L' bekannt. Zwou vun den dräi Säiten vum Dräieck sinn bekannt, sou datt Dir den Tangent benotze kënnt fir déi drëtt Säit ze fannen Worden berechent:
Wénkelberechnung mam Tangent:
Tan β = Géigendeel Säit: Nopesch Säit
Tan β = Wb : L'
Tan β = 3200: 4058
Tan β = 0.789
Inv Tan β = 38,3°
Erklärung vun der Berechnung:
Mir wëllen Tan β berechnen. De Tangent deelt déi entgéintgesate Säit vun der ugrenzend Säit (mnemonic: TAN = TOA).
Wb = Radstand = 3200 mm. Mir berechent virdrun L' = 4058mm.
Mir deelen dat dann zesummen; dann hu mer Tan β = 0.789. Fir dann dës Nummer an e Wénkel ze konvertéieren, gitt den Tan-1 Knäppchen am Rechner (normalerweis dréckt als éischt de Shift Knäppchen an dann den Tan Schlëssel) gefollegt vun der 0.789, oder den ANS Knäppchen. Elo kënnt de Wénkel vun 38,3 Grad a Siicht.
Elo sinn d'Lenkwénkel vu béide Frontrieder berechent ginn. Déi lénks viischt Rad ass an engem Wénkel vun 29,5 ° an der rietser viischt Rad an engem Wénkel vun 38,3 °. Dëst bedeit datt de Lenkwénkel op béide Rieder en Ënnerscheed vun 8,8° huet. An enger Béi no lénks gëtt dee selwechte Lenkwénkel mam selwechte Lenkwénkel.
Op der Säit Rad Geometrie puer Rad Positiounen sinn beschriwwen.