Thema:
- Driver Feeler
Kontroll Feeler:
Den Ackermann-Prinzip suergt dofir, datt wann een erandréit, ee Rad méi wäit dréit wéi dat anert Rad. Fir méi Informatiounen iwwer dëst, kuckt op der Säit Ackermann Prinzip en Zeh eraus an der Béi.
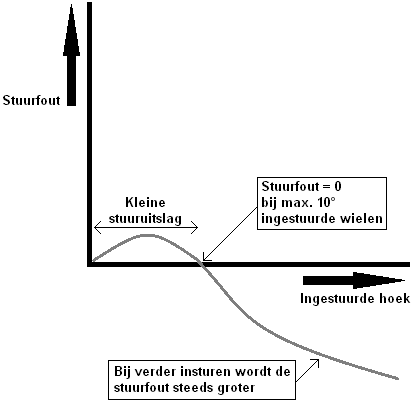
Wann Dir déi erwähnte Säiten liest, wäert et kloer sinn datt dat lénkst Frontrad an dat rietst Frontrad allebéid en anere Lenkwénkel hunn. Also e Lenkfehler geschitt bal ëmmer. De Lenkfehler bedeit datt déi zwee agefouert Wénkel net gläich sinn an dofir huet een Rad méi Rutsch wéi dat anert. Et gëtt nëmmen eng Situatioun an där kee Lenkfehler geschitt. Dëst ass wann Dir mat engem klenge Lenkwénkel dréit, bis zu ongeféier 10 Grad (kuckt Bild).
D'X-Achs an der Figur weist de Lenkwénkel an d'Y-Achs de Lenkfehler. Am lénksen Eck (also bei X = 0) fuert Dir direkt vir. D'Linn ënner "Klenge Lenkwénkel" leeft positiv laanscht d'X-Achs. Dës Linn weist datt de Lenkfehler mat engem maximale Lenkwénkel vun 10 Grad 0 ass. Also bei engem maximalen Lenkwénkel vun 10 Grad gëtt et kee Lenkfehler. Et gëtt dann kee Rutsch an de viischter Rieder. Dat ass bewosst esou opgebaut, well wann ee mat héijer Geschwindegkeet (z.B. op der Autobunn) fiert, läit de Lenkwénkel dacks ëm 10 Grad. Bei héijer Geschwindegkeet hunn d'Frontrieder kee Rutsch mat engem maximale Lenkwénkel vun 10 Grad, also maximal Grip. Mat weiderer Lenkung gëtt de Lenkfehler vill méi grouss. Dat ass am Fong kee Problem, well dat meeschtens an der Stad ass, mat méi nidderegen Vitess. Bei méi nidderegen Vitess huet de Lenkfehler manner Afloss wéi bei méi héijer Geschwindegkeet.