Sujeten:
- Allgemeng Parking Hëllef
- Park Distanz Kontroll
- Réckkamera
- Side Vue
- Ëmgéigend Vue
- Parking Hëllef
Allgemeng Parkhëllef:
Parking Assistenz enthält Systemer déi e Chauffer hëllefe beim Eran an aus dem Parking ze kommen. De bekanntste Parkhëllefsystem ass "Park Distanz Kontroll", ofgekierzt als PDC. Dëse System informéiert de Chauffeur vum Gefier iwwer d'Distanz zum Auto hannen, oder mat extensiv Systemer och un d'Front vum Gefier. Dës Säit beschreift modern Technologien déi entweder eng Ausdehnung vun der Parkdistanzkontrolle sinn oder e komplett standalone Assistenzsystem.
Park Distanz Kontroll:
Park Distance Control (PDC) ass en Distanzwarnsystem deen Signaler moosst wann Dir Parkplazen erakënnt an erausgeet an Informatioun iwwer d'Distanz zum Hindernis liwwert. Et gi Ultraschallsensoren am hënneschte Bumper an dacks och am Front Bumper (kuckt Bild). Dës emittéieren Tounwellen mat enger ganz héijer Frequenz, déi dem mënschlechen Ouer onmerkbar sinn. Dës Ultraschallfrequenzen reflektéieren vun Emgéigend Objeten a gi vum Sensor opgeholl. De Sensor moosst d'Zäit tëscht der Sendung an der Empfang vun dëse Signaler. Wat den Objet méi no ass, dest méi séier gëtt d'Signal zréck. De Sensor erfaasst et a gitt et un d'PDC Kontroll Eenheet (Computer) weider.
Dëse Computer kann et an de Chauffer an Audiosignaler a mat Bild- an Tounsignaler iwwerdroen. Da héiert een e Piepton, deen ëmmer méi séier gëtt wéi den Objet méi no kënnt. Op enger Distanz vu ronn 30 cm gëtt et e konstante Piep, deen Iech als Chauffeur seet, datt Dir musst stoppen.

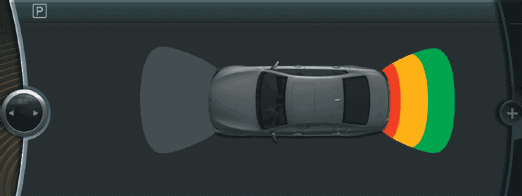
Modern Bordcomputer sinn dacks mat enger Optioun ausgestatt, wou d'Distanz zum Objet op engem Bildschierm ugewise gëtt. D'PDC Sensoren sinn déiselwecht; d'Kontroll Eenheet berechent d'Donnéeën vun de Sensoren a veraarbecht se an Informatioun déi den Ecran kann weisen.
D'Bild hei drënner weist d'PDC Kontroll Eenheet (ECU). Dëse groe Quadrat enthält de Mikrokontroller, de Verstärker an en AN-Paart. De Mikrokontroller iwwerdréit eng Quadratwellespannung mat enger Frequenz vun ongeféier 40 kHz (schwaarz). Eng Blockspannung mat enger niddereger Frequenz gëtt och periodesch erausginn (rout / blo). Den AND Gate kritt déi zwee Blockspannungen. Wa béid Spannungen héich sinn, ass d'Ausgangsspannung (riets vum AND Gate) héich. Wann eng vun den zwou Spannungen niddereg ass, gëtt den Ausgang och niddereg. D'Ausgangsspannung gëtt zréck an de Mikrokontroller an an de Sender am PDC Sensor geschéckt. De Sender straalt den Ultraschallsignal mat enger Geschwindegkeet vun ongeféier 300 m/s aus. Wann en Objet an der Géigend ass, reflektéiert den Ultraschallschall a gëtt vum Empfänger registréiert. Mir nennen dëst "Triangulatioun". Den Empfänger schéckt dat geformt Blocksignal un d'ECU. De Blocksignal gëtt mat engem Verstärker verstäerkt an duerno vum Mikrokontroller veraarbecht.
D'Zäit tëscht der Empfang vum Ausgangssignal vum AND Gate an dem Verstärker ass eng Mooss fir d'Distanz zum Objet. Wat méi kleng d'Distanz tëscht dem PDC-Sensor an dem Objet ass, dest méi kuerz ass d'Zäit. De Mikrokontroller kontrolléiert de Buzzer oder kommunizéiert mat anere Kontrollunitéiten iwwer de CAN Bus.
De Circuitdiagramm (VAG) hei ënnen weist d'Kommunikatioun tëscht de Kontrollunitéiten, Inputen op Schalter an Ausgänge fir ënner anerem de Buzzer.
D'PDC Kontroll Eenheet (J446) kritt d'Fuergeschwindegkeet an d'Récksignal iwwer de CAN Bus. D'PDC Kontroll Eenheet schéckt eng modulated Spär Spannung iwwer Verbindung T12 / 11 un de Kabel splice (X86 am hënneschte Bumper), déi un all PDC Sensor verbonne ass (G203, G334, G335 an G206). All PDC Sensor huet säin eegene Signaldrot (iwwer Pin 2) un d'ECU. Ausserdeem ass de Buedem vun all Sensor mat engem Buedemschweiß (352) verbonnen.
Wann een oder méi Sensoren en Objet erkennen, aktivéiert d'Kontrolleenheet de Buzzer (H15). Ofhängeg vun der Distanz zum Objet, schéckt de Buzzer e méi séier oder méi lues intermittéierend Tounsignal.

Dank der Kommunikatioun mat der Diagnostic Interface (J533) ass et méiglech déi folgend Diagnostice Funktiounen ze Leeschtunge:
- Ufro Feeler Erënnerung
- Kodéierung vun der Kontrollunitéit unzepassen (z.B. nom Ausbau vum System mat PDC-Sensoren op der viischter oder no der Installatioun vun enger Seelstang)
- ajustéiert de Buzzervolumen
- Interrogéiert Moosswäertblocken vun ënner anerem d'Distanz vun alle Sensoren zum Objet, déi berechent Distanz an d'Stabiliséierungszäit vum Sender an Empfänger.
Réckkamera:
Nieft der Parkdistanzsteuerung kann d'Parkhëllef och mat enger Réckkamera ausgestatt sinn. Dee Moment wou de Chauffer d'Gefier an d'Réckgeschwindegkeet setzt oder e Knäppchen am Interieur dréckt, gëtt d'Kamera hannen am Gefier ageschalt. Normalerweis weist den Ecran vum Radio oder Bordcomputer d'Bild.
D'Bild hei drënner weist e BMW Display mat dem Bild op der hënneschter Säit vum Gefier. Riets vum Kamerabild ass e Gefier mat engem Dräi-Deel Gitter virun an hannen; Dëst weist d'Distanz zu engem Objet deen d'PDC Sensoren registréieren.
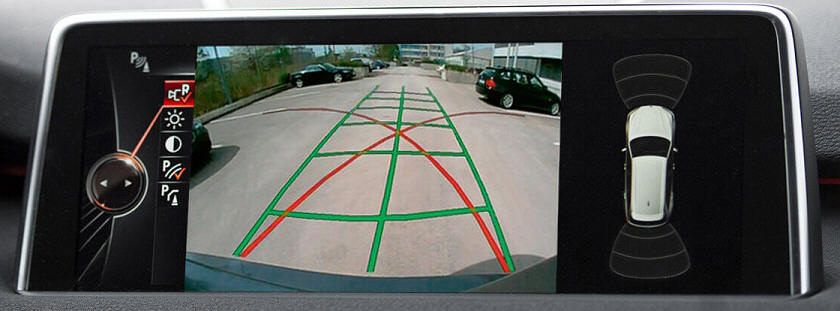
Rout a gréng Linnen kënnen am Réckkamera Bild gesi ginn. Déi rout Linnen weisen déi méiglech Richtung an där d'Gefier steiere kann; Bei maximaler Lenkung verfollegen d'Rieder déi rout Linn op der Äussewelt vun der Béi. De grénge Gitter follegt d'Richtung an där d'Lenker gedréint ginn; am Moment sinn d'Véierrieder riicht vir. Wann de Chauffeur de Lenk dréit, weisen déi gréng Linnen déi tatsächlech Fuerlinnen un. De Lenkwénkelsensor registréiert d'Positioun vum Lenkrad.
D'Réckkamera ass heiansdo a kloer Vue a läit dacks no bei der Nummerplack an / oder dem Grëff fir den Hecklaf opzemaachen. Heiansdo wielen d'Fabrikanten d'Kamera aus der Siicht ze montéieren. D'Bild hei drënner weist d'Réckkamera vun engem VW Golf, wou en Elektromotor de VW Emblème kippt fir d'Kamera no baussen ze beweegen. Den Emblème klappt automatesch zréck wann Dir nach eng Kéier no vir fuert. Net nëmmen d'Kamera ass aus der Siicht plazéiert, d'Objektiv gëtt och manner séier dreckeg.

Säit Vue:
Wann een tëscht zwee Gefierer oder groussen Objeten réckgängeg ass, muss een e bëssen no vir fueren fir lénks a riets ze kucken. Dëst ass vill méi einfach mat enger Säit Vue Kamera (och Corner Vue genannt); Kameraen op der lénker a riets am viischten Bumper schécken d'Bild op den Ecran am Dashboard. D'Bild weist d'Bild vun den Eckkameraen. Leider kënne Kameraen net onsichtbar montéiert ginn. Autoen, déi mat enger Säitekamera ausgestatt sinn, hunn eng (dacks) schwaarz Lens am Bumper. D'Bild hei drënner weist de viischte Bumper vun engem BMW mat der lénker Kamera.


Ëmgéigend Vue:
Déi luxuriéisste Parkhëllefssystemer enthalen ouni Zweifel de "Surround View", och bekannt als Top View, 3D oder Bird-View. All Mark gëtt säin eegene Numm a Charakteristik vum System. Mir benotzen elo den Numm Surround View.
Mat Surround View gëtt den Top vum Auto um Bildschierm gewisen. Et gesäit aus wéi wann eng Kamera op den Daach vum Auto an d'Géigend ronderëm kuckt. Den Auto ass eng Simulatioun an d'Ëmfeld gëtt vun e puer (normalerweis véier) Kameraen opgeholl.
Déi folgend dräi Biller (vu BMW) weisen d'Bild deen de Chauffer gesäit. Beim Parking ass d'Trennung vun der Parkplaz an Objete wéi Posten asw kloer ze gesinn. Wann Dir ëmgedréit, kënnt Dir op der Heck zoomen; Hei gesäit een haaptsächlech Planzen. Déi konventionell PDC Sensoren notéieren d'Distanz zu de Planzen. De Computer markéiert dës Distanz mat enger rouder Faarf.

Beim Forward Parking kann de System och d'Ëmgéigend an d'Front weisen. PDC Sensoren hëllefen elo och d'Distanz zum Zait ze bestëmmen.

Parallel Parking laanscht engem Trottoir kann, wann de Chauffer net virsiichteg ass, Schued un de Pneuen a Felgen verursaachen. De Surround View bitt elo och eng Léisung; Duerch de gudden Iwwerbléck iwwer d'Stroosszeen kann een direkt an no beim Trottoir parken. Déi lescht Entwécklunge vu BMW maachen et méiglech d'Kamerabild ëmzedréinen an d'Gefier ze simuléieren.

Déi nächst dräi Biller weisen d'Plaze wou d'Kameraen dacks stinn.



Parking Hëllef:
Als Ausdehnung vun der Parkhëllef kann déi sougenannt "Ausser-Parkhëllef" de Chauffer hëllefen, wann een eng Parkplaz no hanne mat limitéierter Sicht verléisst. Dëst kéint a Situatiounen sinn, wou d'Gefier nieft enger Mauer oder tëscht Gefierer geparkt ass.
D'Sensoren hannen am Auto erkennen de Verkéier, deen hannert dem Gefier passéiert an eventuell e Risiko vun enger Kollisioun duerstellt. Dëst beinhalt all bewegt Objeten, déi d'Gefier mat enger gewësser Geschwindegkeet erreechen. Wann de Parking Assist System e Gefier erkennt, erkennt e Message um Display vum Infotainmentsystem. En akusteschen Tounsignal gëtt normalerweis dozou bäigefüügt. Wann de Chauffeur dës Signaler ignoréiert an no hannen fiert, intervenéiert de System kierperlech duerch d'Bremsen fir d'Gefier ze luesen.
