科目:
- 車輪案内の自由度
- ホイールガイドのヒンジ
- ホイールガイド内のガイド
- 自由度を計算する
ホイールガイドの自由度:
車のサスペンションには、サスペンション全体に自由度を与える多数のヒンジ (ウィッシュボーンやショックアブソーバーを含む) が含まれています。 ホイール ガイドにより、可能なホイールの動きの自由度が XNUMX つまたは XNUMX つのみに制限されます。 ホイールが「固定」されていない場合、ホイールは自由に回転、傾斜 (X 方向および Y 方向)、回転、上下に移動できます。 このとき、原則としてホイールはサスペンションから「緩んだ」状態になります。 「誘導」がなければどんな方向にも動くことができます。 先ほど述べた各動作は XNUMX つの自由度です。
ホイール サスペンション、つまりホイール ガイドにより、動きの自由度が 1 自由度に制限されます。 これは、ホイールがドライバーの影響を受けることなく、一方向にのみ「自由に」動くことができることを意味します。 その自由な動きは、圧縮とリバウンドの上下の動きです。 凹凸のある路面でもホイールが妨げられることなく内外に跳ね返る可能性があります。
自動車のホイールサスペンションは、多数のラインヒンジ、ボールジョイント、ロータリースライドヒンジで構成されています。 これらのヒンジはすべて相互に影響を与えます。 ヒンジが 0 つ多すぎると、自由度が多すぎる (ホイールが意図せず別の方向に移動する可能性がある) か、自由度が XNUMX になります (ホイールが移動できないため、圧縮や圧縮ができません)。
ホイールガイドのヒンジ:
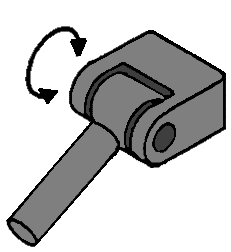
ラインヒンジ:
このラインヒンジは一方向に移動できます。 上下。 これにより 1 の自由度が提供されます。
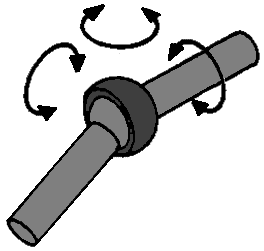
ボール・ジョイント:
このヒンジを使用すると、関連する部品が相互に 3 つの動きを行うことができます。 うなずいたり、回転したり、回転したりする動き。 このヒンジには 3 つの自由度があります。これは、ヒンジが「緩んでいる」場合、3 つの自由な動きを行うことができるためです (矢印を参照)。
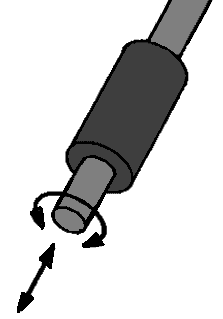
スイベルスライドヒンジ:
このヒンジは 2 つの動きをすることができます。 回転と内外のスライド動作。 原則として、これはショックアブソーバー (マクファーソン ストラットの) の例です。 これら 2 つの動きにより、回転スライド ヒンジには 2 つの自由度が確保されます。
ホイールガイド内のガイド:
さまざまなタイプのヒンジからホイール サスペンションを作成するには、ウィッシュボーンなどの 1 つのオブジェクトにヒンジを組み合わせる必要がある場合があります。 この支持アームをガイドと呼びます。 以下にこれらの導体の例をいくつか示します。
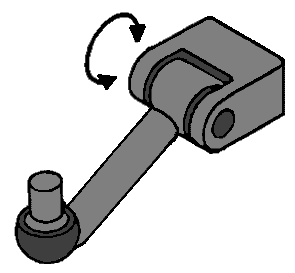
ボールジョイント付きラインヒンジ:
ウィッシュボーンの代表的な例で、ラインヒンジ側でボディ(またはサブフレーム)に接続され、ボールジョイント側でステアリングナックルに接続されます。 このヒンジ全体が緩んでいると、ラインヒンジの移動方向(1方向)とボールジョイントの3方向の両方に動く可能性があります。 結局、ライン ヒンジの自由度は 1、ボール ジョイントの自由度は 3 です。この部分は 1 つの導体と見なされるため、自由度を加算することができます。 1 と 3 により 4 自由度になります。
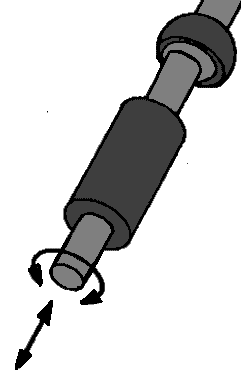
ダブルボールジョイント:
ダブルボールジョイントを備えたガイドの例は、内側と外側のタイロッドボールを備えたタイロッドです。 各ボール ジョイントには 3 つの自由度があり、1 つの導体なので、これらを加算する必要があります。 ただし、1 つのボール ジョイントが回転運動を行うと、もう 1 つのボール ジョイントも同様に回転するため、同じ自己回転を持ちます。 したがって、自己回転の 6 自由度はカウントされません (赤い矢印を参照)。 この導体の自由度は合計 1 ですが、次の計算では「自己回転 r」に数値 1 を入力します。 この XNUMX は計算で減算されます。
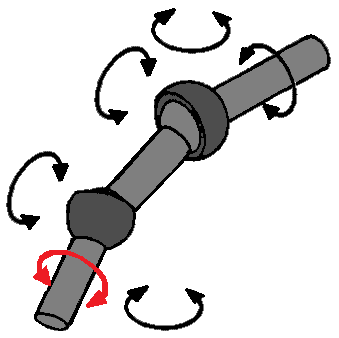
ボールジョイント付きスイベルスライドヒンジ:
前述したように、ショックアブソーバーは回転スライドヒンジです。 ただし、最初はそうは思わないかもしれませんが、すべてのマクファーソン ストラットの上にはボール ジョイントもあります。 ショックアブソーバーの上部には別のゴムがあります。 このゴムはショックアブソーバーにある程度の自由な動きを提供するため、ボール ジョイントの特性も備えています。 したがって、ショックアブソーバーはロータリ スライド ヒンジの 2 自由度とボール ジョイントの 3 自由度の両方を持ち、合わせて 5 の自由度になります。 ロータリ・スライド・ヒンジの回転運動はボール・ジョイントの回転運動と同じ運動であるため、ここでも自然な回転が生じます。 したがって、自己回転の「r」に 1 を追加する必要があります。
自由度を計算する:
自由度はサスペンションデータに基づいて計算できます。 式を適切に完成させるには、ヒンジとガイドを次のカテゴリに分類する必要があります。
- Lは導体の数を表す
- g ジョイントとヒンジの数
- rは自然回転数(1ガイドのダブルボールジョイントと同様)
さらに、文字:
- k ホイールキャリアの数 (ステアリングナックルであるため、ほとんどの場合は 1)
- εfi は、ジョイントとヒンジの合計数の自由度を表します。
F = 6 (k + L – g) -r + εfi
例:
ホイール サスペンションには、k 1 ホイール キャリア (ナックル)、L 2 ガイド、g 5 ジョイント、r 2 自己回転、εfi 15 総自由度が含まれます。
数式形式では次のようになります。
F = 6 (1 + 2 – 5) – 2 + 15
F = 6 x (-2) – 2 + 15
F = 1
これで自由度が 1 になったので、これは良いことになります。 ホイールは純粋な上下運動を行うことができます。
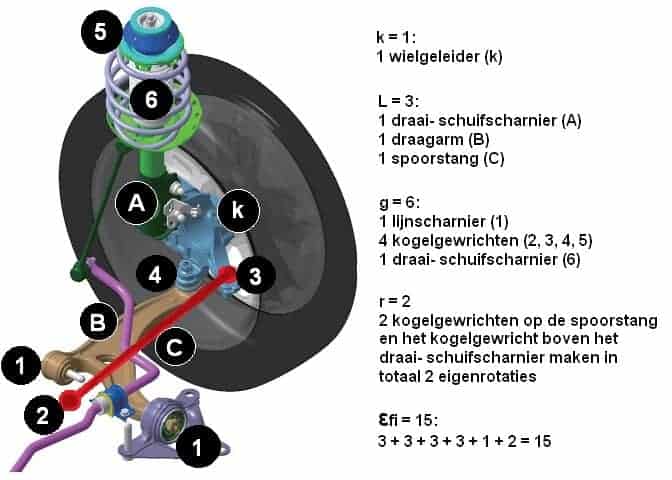
これを明確にするために、ホイール サスペンションの写真の例を次に示します。
下の画像は、対応する凡例が付いたマクファーソン ストラットです。 文字 A、B、C はガイドを表し、1 ~ 6 の数字はヒンジ/ジョイントを表します。
εfi は、合計されたヒンジの自由度です。 したがって、ボール ジョイントごとに 3 自由度 (つまり 4 x 3)、ライン ヒンジの自由度 1、ロータリ スライド ヒンジの自由度 2 になります。
式は次のようにして完成させることができます。
F = 6 (k + L – g) -r + εfi
F = 6 (1 + 3 – 6) – 2 + 15
F = 6 x (-2) – 2 + 15
F = -12 – 2 + 15
F = -14 + 15
F= 1 自由度