Onderwerp:
- ドライバーエラー
制御エラー:
アッカーマンの原理により、ターンインする際に、一方の車輪が他方の車輪よりも大きくターンインすることが保証されます。 詳細については、次のページを参照してください。 アッカーマン原理 en カーブでのトーアウト.
上記のページを読むと、左前輪と右前輪のステアリング角度が異なることがわかります。 そのため、ステアリングエラーはほぼ常に発生します。 ステアリング エラーは、入力された 10 つの角度が等しくなく、そのため一方の車輪のスリップが他方の車輪よりも大きくなることを意味します。 ステアリングエラーが発生しない状況は XNUMX つだけです。 これは、約 XNUMX 度までの小さなステアリング角で曲がるときです (画像を参照)。
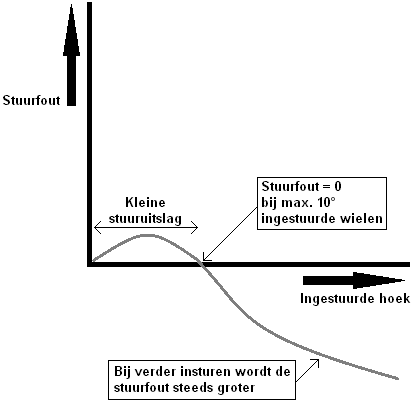
図の X 軸は操舵角、Y 軸は操舵誤差を示します。 左隅 (X = 0) では直進します。 「小さいステアリング角度」の下の線は、X 軸に沿って正に伸びています。 この線は、最大操舵角 10 度の操舵誤差が 0 であることを示しています。 したがって、最大ステアリング角度が 10 度であれば、ステアリングエラーは発生しません。 そうすれば前輪の滑りはなくなります。 高速走行時(高速道路など)ではステアリング角度が約 10 度になることが多いため、このように意図的に構成されています。 高速走行時、前輪は最大 10 度のステアリング角度でスリップせず、最大のグリップ力を発揮します。 さらにステアリングを操作すると、ステアリング誤差がさらに大きくなります。 これは通常、都市部で低速で行われるため、原則的には問題ありません。 低速ではステアリング誤差の影響は高速よりも小さくなります。