科目:
- 一般
- ワイパーモーター部品
- ワイパーモーターを接続します
- ワイパーモータープラススイッチ
- 理論からメーカーのスキームまで
- XNUMXスピードワイパーモーター
- LINバス制御のワイパーモーター
一般:
リアワイパーモーターは車のテールゲートに取り付けられています。 ウィンドウまたはテールゲートの板金に穴があり、そこからワイパーモーターのシャフトが突き出ています。 ワイパーブレードを備えたワイパーアームはこの車軸に取り付けられています。 リアウィンドウだけでなく、テールゲートやリアバンパーの残りの部分もワイパーブレードによって拭き取られるため、車軸は明らかに完全に回転できません。 そのため、モーターにはシャフトが最大 180 度まで動くことができる機構が組み込まれています。

リアワイパーモーターは常に XNUMX つの速度を持ちます。 フロントガラスのワイパースイッチはオンとオフを切り替えることができ、通常は間隔があります。 スイッチを入れると、数秒ごとにモーターが制御されます。
フロントガラスのワイパーは、スイッチをオフにすると必ず初期位置に戻ります。 これが起こらないと、スイッチが「オフ」位置に設定されたときにワイパーアームが窓の途中で停止してしまいます。 モーターの電源は遮断されるのではなく、ゼロ点に到達するまでオンのままになります。
ワイパーモーター部品:
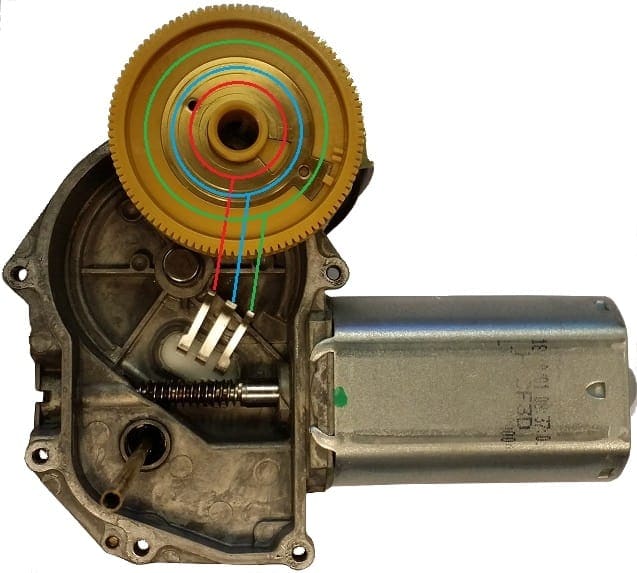
フロントガラス ワイパー アームが開始位置に戻ることができるように、スライド接点を備えた内部接点プレートが組み込まれています。 次の画像は、ワイパー モーターの仕組みを説明しています。
ワイパーモーターのバックプレートを取り外した状態です。 赤い矢印は、バックプレートのメカニズムの丸いカムが前後に動く場所を示しています。 この機構により、黄色のプラスチックギアの回転運動が出力シャフトの前後運動に変換されます。 図では出力軸が直立しています。 フロントガラスのワイパーアームはこの車軸に取り付けられています。

右の画像は、ウォーム ギアとプラスチック ギアを備えたワイパー モーターの一部を示しています。 こちらは機構を分解したところです。

次のテキストは、下の画像に関連しています。 黄色のプラスチックの歯車が裏返されます。 ここでは、導電性接触ディスクのノッチと凹みがはっきりと見えます。 赤、青、緑は、摺動接点が接点ディスクに接触する位置を示します。
摺動接点が導電性接点プレートと接触する位置を把握できるように、赤、青、緑の色で表示されます。 スライド接点の用途は次のとおりです。
Rood: イグニッションをオンにすると、常に 12 ボルトが表示されます。
ブラウ: この滑り接触がゼロ位置を決定します。
グーン: これがその塊です。 モーターはゼロ位置でこれに接続されます。
エンジンの作動中、XNUMX つのスライド接点が金色の接点プレート上を「引きずります」。 接触板には切り欠きと凹みが設けられています。 したがって、摺動接点がすべて同時に接点ディスクに接触することはありません。 中央のもの (青で表示) は、ゼロ位置への移動を担当します。 接触プレートは導電性です。 モーターがまだ初期位置にない場合は、内側 (赤) と中央 (青) のスライド接点が互いに接続されています。 電圧は、コンタクトプレートを介して赤色コンタクトから青色コンタクトに伝達されます。 これにより、赤い摺動接点がノッチに到達するまでモーターが動作し続けることができます。 その瞬間、青い方に電圧を伝えることができなくなります。 モーターの制御が停止しました。
同時に外側の摺動接点は接点板を介して凹部(緑色で表示)を介して青色の摺動接点と接触します。 緑色の摺動接点は車両のアースに接続されています。 この滑り接触が一種のブレーキとして機能します。 これにより、ワイパーモーターが停止します。 質量は緑を経由して青に伝わります。 モーターは両側でアースに短絡されているため、ゼロ位置に留まります。
ワイパーモーターの接続:
ワイパーモーターの配線を接続するには、接触板や摺動接点の動作などを検討する必要があります。 どの点に電圧が存在するかを理解して初めて、配線の測定と接続に進むことができます。
リア ワイパー モーター用のテールゲートのワイヤリング ハーネスは、多くの場合 XNUMX 本または XNUMX 本のワイヤで構成されます。 これらのワイヤでは、定電圧、スイッチ電圧、および接地を測定する必要があります。 何も測定されない残りのワイヤには、多くの場合、モーターが停止位置にあるときに電源電圧 (アース接続されたモーターの場合) またはプラス (プラススイッチ付きモーターの場合) がかかります。 すべてのワイヤが接続され、ワイパー モーターが開始位置にある場合にのみ、このワイヤで測定を実行できます。 それ以外の場合は何も測定されません。
ワイパーモーターにはプラス接続とアース接続があります。 これは、スイッチが電気モーターのプラス側またはアース側にあることを意味します。 これは測定前に知っておくことが非常に重要です。 以下の章では、各ステップについて詳しく説明します。 プラスとアースの違いに注目してください。
フロントガラスワイパーモーターポジティブ:
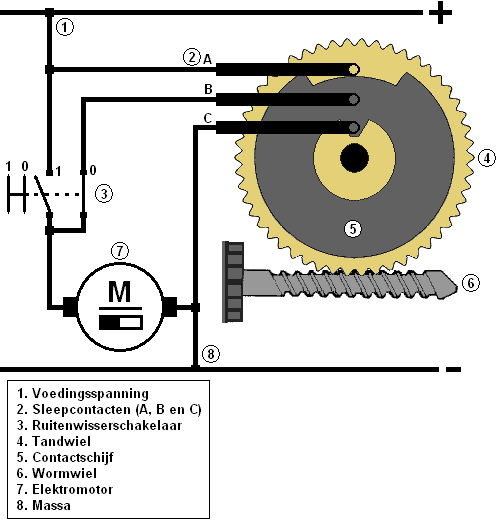
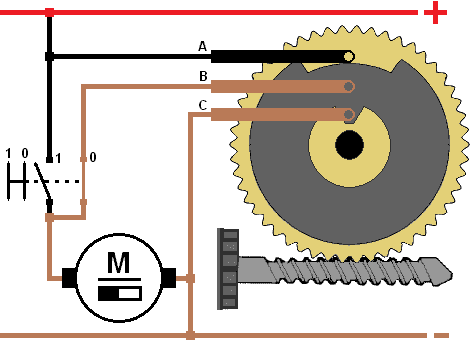
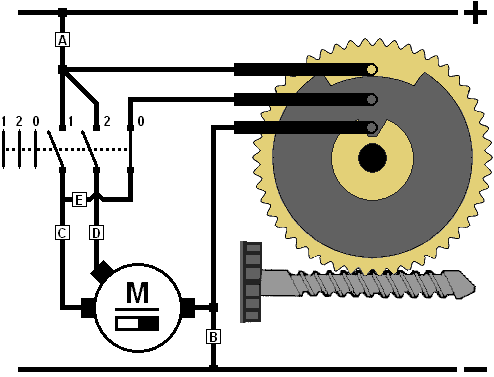
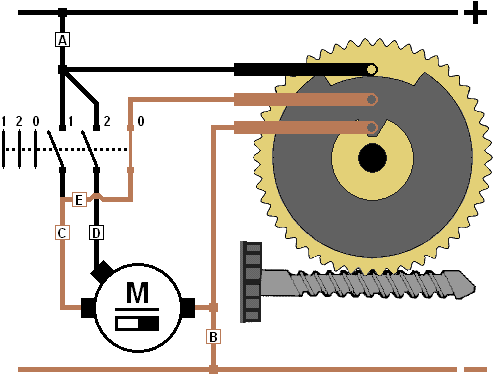
この図は、これを、たとえば実技試験の悪名高い部分にどのように関連付けるかを決定するためにも使用できます。 以下は、プラススイッチ付きリア ワイパー モーターの凡例を含む図です。 ワイパーモーターが停止し、スイッチ「0」が閉じます。
電気モーター (7) は、一定速度でのみ直接バッテリー電圧を受け取ります。 この場合、スイッチ 1 は閉じられ、スイッチ 0 は開きます。 電気モーター (7) がウォームギア (6) を駆動し、ウォームギア (4) がギア (5) を回転させます。 灰色の導電性接触ディスクはプラスチック ギアに取り付けられているため、回転します。 フロントガラス ワイパー スイッチがオフの位置に設定されている場合、接点ディスク (2) とスライド接点 A、B、および C (XNUMX) により、エンジンが正しい位置で停止することが保証されます。 これについては以下で明らかにします。
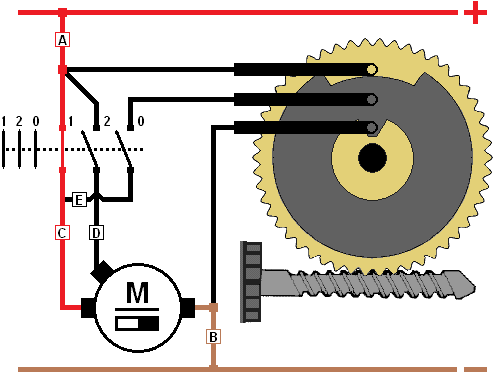
フロントガラスのワイパーモーターがオンになりました:
この状況では、ワイパー モーターのスイッチがオンになります。 電源電圧は赤色のプラス線を介して供給されます。 スイッチ 1 が閉じ、モーターに一定の供給電圧が供給されます。 エンジンの反対側はアースに接続されているため、エンジンは一定の速度で回転します。 ウォーム ギアはワイパー モーターによって駆動されるため、回転します。 この場合、これはモーターへの電圧供給には影響しません。
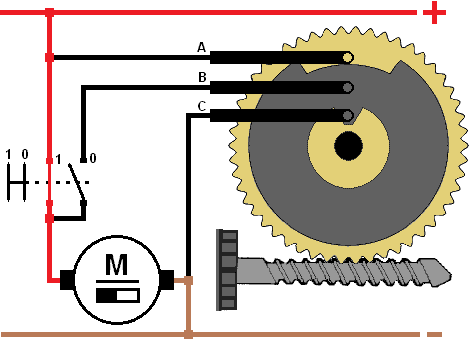
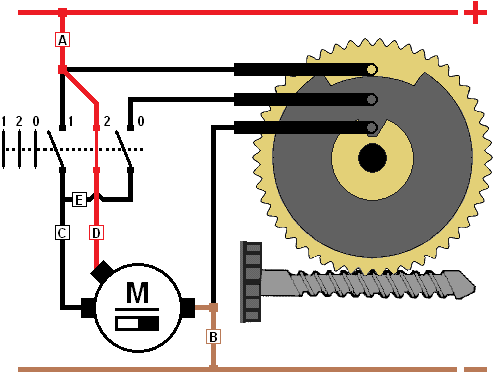
スイッチがオフの位置にあり、フロントガラスのワイパーがまだ動いています:
下の画像では、ワイパー スイッチが「オフ」の位置に設定されています。 これは、スイッチ 1 が開き、スイッチ 0 (ゼロ位置から) が閉じられることを意味します。 このとき、電流は摺動接点 A を経由し、灰色の接点板を介して摺動接点 B に流れます。電流は摺動接点 B からスイッチ 0 を経由してワイパーモーターに流れます。 ワイパーモーターによりウォームギアを介してギアが駆動されるため、当接板も回転します。 接触板の切り込みが上に戻るまで、モーターは回転し続けます。
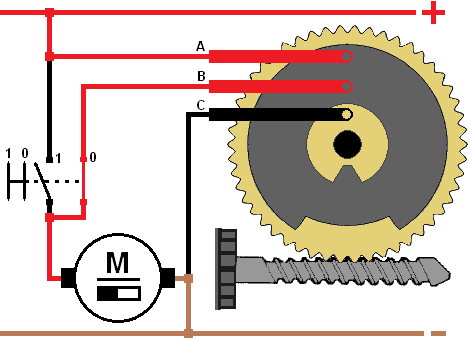
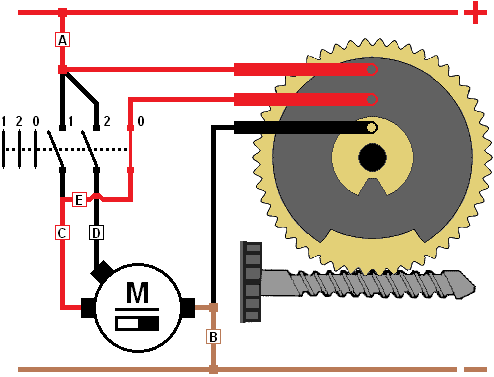
スイッチをオフの位置にします。 フロントガラスワイパーの停止:
ギアは、接触プレートのノッチが上部に来るまで回転し続けます。 これにより、摺動接点 A と B 間の接触が遮断されます。 ワイパー接点 A は (黄色の) プラスチック ギアによって絶縁されているため、スライド接点 B にはそれ以上電流が流れません。したがって、ワイパー モーターに電流は流れなくなります。 接触板が十分に回転すると、摺動接点 C も接触板の小さな導電部分に接触します。 このとき、摺動接点Bと摺動接点Cは接続されます。 C は常にアースに接続されているため、B もコンタクト プレートを介してアースに接続されます。 フロントガラスのワイパー モーターは現在、両側がアースに接続されているため、すぐに停止します。 つまり、これは実際には一種のブレーキとして機能します。 これにより、ワイパーモーターは常に同じ場所で停止します。
アニメーション:
このアニメーションは、スイッチと接触プレートのさまざまな位置を明確に示しています。 ここまでの説明を簡単にまとめておきます。
- スイッチオフ: スイッチはゼロの位置にあり、電気モーターはプラスとアースで短絡されています。
- スイッチオン、一定速度: スイッチは位置 1 にあり、接触プレートは時計回りに XNUMX 回転します。 この位置ではコンタクトプレートは使用されません。
- スイッチ位置 0、ゼロ位置に回転: ノッチがスライド接点に達するまで、接点ディスクがモーターに電力を供給します。
- AB(+中断)、BCが接触。 これによりエンジンにブレーキがかかり、エンジンはほぼ即座に停止します。

たとえば、実技試験中にケーブルを接続する必要がある場合、正しいスイッチの位置を見つける必要があります。 ワイパー モーターの図から、プラグのどのピンが電源、アース、またはゼロ位置を担当しているかを読み取ることができます。 車のワイヤーハーネスでどのワイヤーに 12 ボルトがあるかを測定することで、すでに接続できています。 抵抗測定を使用すると、どの接続がアースであるかを判断できます。 オーム計は、この接続における抵抗値が 1 オーム未満であることを示します。 もちろん、マイナス線は車体上の適切な接地点に保持する必要があります。 次に、スイッチを複数の位置に移動すると、どのワイヤがスイッチのどの位置に属しているかを見つけることができます。 この図を使用して、どのワイヤを相互に接続するかを決定できます。
理論からメーカーのスキームまで:
リアワイパーモーターの理論は前のセクションで説明しました。 これらの図は、カットアウェイ ワイパー モーターの接触プレートがどのようにしてモーターが電圧を受け取り、開始位置に戻るように回転させるかを明確に示しています。 このセクションでは、この図をメーカーの図に変換する方法について説明します。
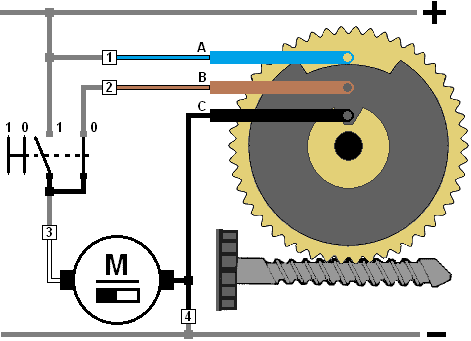
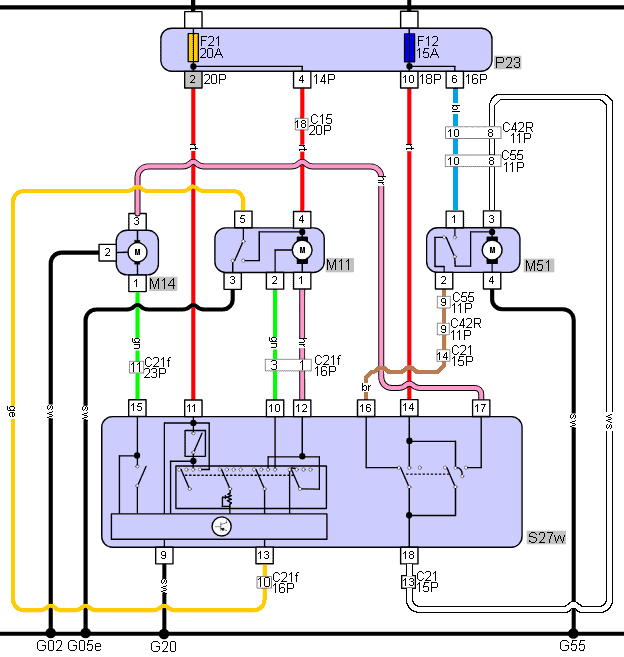
下に 電気図 ヒュンダイ ゲッツのリア ワイパー モーターをベースにしています。 配線の色(青、茶、白、黒)は車両の色に対応しています。
右および下の図の 1 ~ 4 は、ワイパーモーターと車のワイヤーハーネスを接続するコネクタのピンを示しています。 両方の図の番号と配線の色は一致しています。 以下の図は、HGS-data.com から取得したものです。 リア ワイパー モーターの部品コードは M51 です。
両方の図で、青色のワイヤ (プラグのピン 1) がヒューズからの常時プラスのワイヤであることがわかります。 茶色のワイヤ (ピン 2) はゼロ位置に戻す役割を果たします。 下図は接点板をメカニカルスイッチとして示したものです。 スイッチからの切り替えられたプラスのワイヤは、白いワイヤ (ピン 3) に接続されます。 黒い線はアース線 (ピン 4) で、本体のアース点 (G55) に接続されています。
休止位置では、電気モーターはアースに短絡されます。 白と茶色のワイヤはコンタクトディスクを介して互いに接続されます。
XNUMXスピードワイパーモーター:
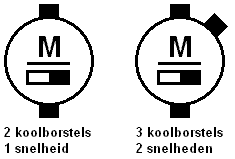
ここまでは、シングルスピード ワイパー モーターのみについて説明してきました。 リアウィンドウに最適です。 フロントガラス ワイパー モーターは、多くの場合 XNUMX つの異なる速度で動作します。XNUMX つは断続 (スイッチの XNUMX 番目の位置) と連続ワイピング (XNUMX 番目の位置) の両方に使用される通常速度、もう XNUMX つは高速 (XNUMX 番目の位置) です。 したがって、ワイパースイッチの XNUMX 番目の位置と XNUMX 番目の位置の間には、電動モーターが回転する速度に差が生じます。 これは複数のカーボンブラシを使用することで実現されます。 XNUMX スピード ワイパー モーターには XNUMX つのカーボン ブラシがあり、XNUMX スピード ワイパー モーターには XNUMX つのカーボン ブラシがあります。 右の図は、シングルスピードおよびデュアルスピードワイパーモーターのシンボルを示しています。
高速になると、オンになる電機子巻線の数が少なくなります。 アーマチュアの回転によって発生する逆電圧が小さくなりました。 生成される逆電圧が少なくなるため、アーマチュア、そして最終的には電気モーター全体がより高速で動作します。
XNUMX 速ワイパー モーターの図は、上で説明したものと非常によく似ています。 ここでワイパーモーターが再びオンになります。
スイッチの XNUMX つの位置が表示されます。
– 位置 1: 低速、一定回転。
– 位置 2: 高速、一定回転。
– 位置 0: スイッチをオフにし、開始位置 (ゼロ位置) に戻ります。
右の図では、最初の位置が有効になっています。 これが低速です。
ここではモード 2 が有効になります。 これで、モーターは別のカーボンブラシを介してプラスの電圧を得ます。 電気モーターの逆電圧が低くなり、他のカーボン ブラシが接続されているときよりも速度が速くなります。
このスケジュールでは、位置 0 が選択されています。 モーターのスイッチがオフになりますが、最初に開始位置に戻ります。 コンタクト プレートはスライド コンタクト A と B を接続するため、ワイパー モーターには供給電圧が供給されます。 接点プレートがさらに 180 度回転すると、摺動接点 A と B の間の接触が遮断され、電源電圧が供給されなくなります。
接点板と摺動接点の動作は1スピードワイパーモーターと同様です。
この状態では、接点プレートが再び回転し、摺動接点 B と C が互いに接触します。 これで、モーターは両側で接地されました。 ワイパー モーターは、再びスイッチがオンになるまでこの位置に留まります。
LINバス制御のワイパーモーター:
前述のシステムは、ワイパー スイッチからの電圧制御を使用します。 最近の自動車では、LIN バスを介した制御がますます使用されています。 コントロールユニットはワイパーモーターを制御します。 スイッチ (S) と雨/光センサー (RLS) の両方からの複数の入力は、フロントガラス ワイパー モーター (RWM) をオンにするか、異なる速度で拭き取るか、またはスイッチをオフにする信号を ECU に提供します。
この図は、ワイパー モーターを制御するコンポーネントを示しています。
スイッチ (S) は XNUMX 本の緑色のワイヤで ECU に接続されています。 スイッチの位置はこれらのワイヤを介して送信されます。
したがって、従来の制御の場合のように、スイッチは RWM に直接接続されません。 RLS は ECU (12 ボルト) から電力を受け取り、接地点を介して接地を取得し、LIN バス線を介して他の接続されたコンポーネントに信号を送信します。 RWM は、LIN バス上の信号によって制御されます。 RWM の制御デバイス (トランジスタの記号で認識可能) は、電気モーターの実際の制御を保証します。

従来のワイパーモーターでは、導電性接触板の位置によってゼロ位置への移動が発生していました。 LIN バス制御のワイパー モーターでは、この接触プレートが位置ディスクとホール センサーに置き換えられました。 ポジションディスクの位置はプラスチックギアの位置、つまりワイパーアームの位置に依存します。 位置ディスクは、いくつかの北極と南極に分割されます (N は北を表し、S は南を表します)。 位置ディスク上の各 N 極と S 極のサイズは異なるため、RWM の制御ユニットはホール センサーを使用してギアの正確な位置を決定できます。 RLS またはスイッチがワイパー モーターの制御を終了すると、RWM の制御ユニットはポジション ディスクが「ゼロ位置」に到達するまで電気モーターを制御します。
このコントロールの利点は次のとおりです。
- PWM 制御により、さまざまな速度での運転が可能になります。
- 電気モーターの回転方向は逆にすることができます。 時計回りに回すとワイパーアームが上がり、反時計回りに回すとワイパーアームが下がります。 これにより、ワイパー機構の設置スペースを小さくすることができる。
- ゼロの位置は異なる場合があります。 時々ワイパーブレードを少しだけ上に動かすと、ワイパーブレードのゴムが反対方向に傾きます。 フロントガラスのワイパーブレードは、フロントガラス上で常に同じ位置を占めるわけではありません。 これはワイパーブレードの寿命に良い影響を与えます。
LIN バス信号はオシロスコープで測定できます。 表示されているスコープ画像は、ECU (マスター) と雨/光センサーおよびワイパー モーター (スレーブ) 間の通信を示しています。

ページ上で LINバス LIN バス メッセージの構造について説明します。 フロントガラス ワイパー システムの通信についても詳細に説明し、LIN バス信号の障害をどのように認識できるかについても説明します。