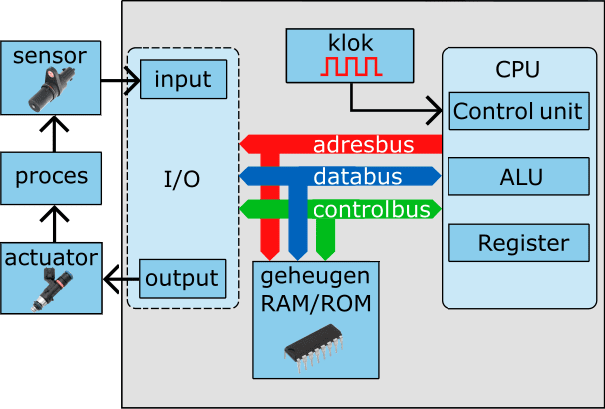
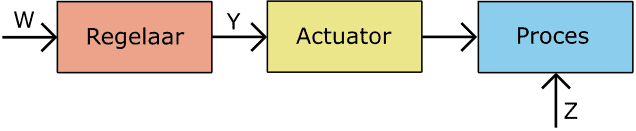
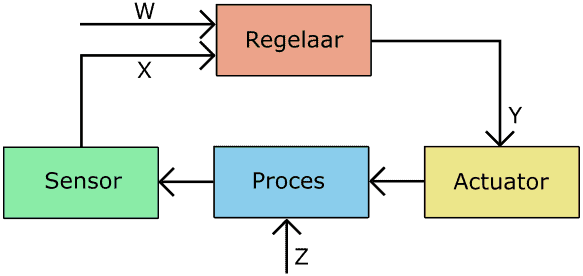
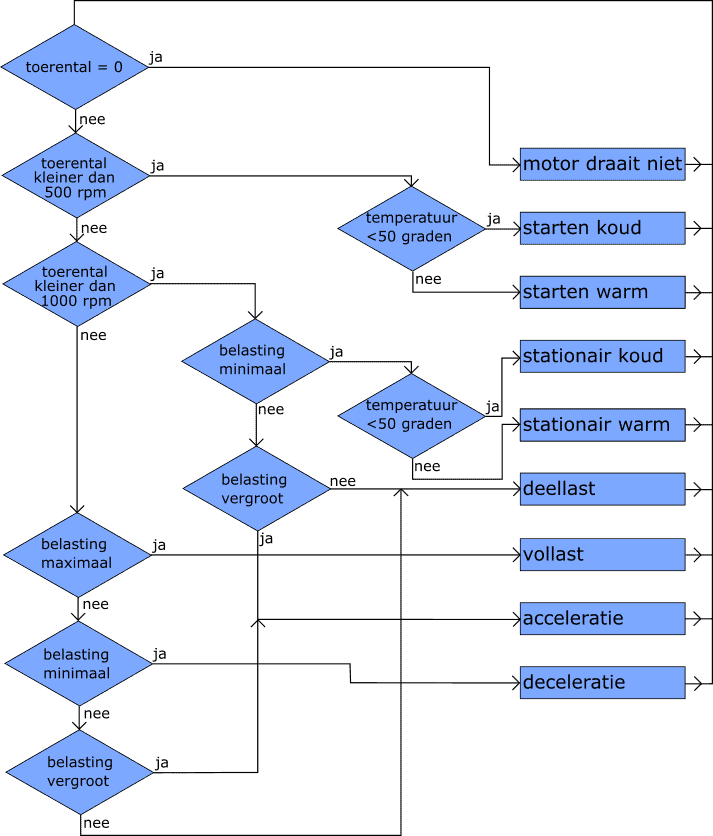
プロセス制御 科目:制御技術運転条件に基づいたプロセス制御 制御技術:ECU はプロセスを測定、制御、規制します。 ECUはセンサーから情報を受け取ります。 センサーは物理量の変化を電気信号に変換します。 このセンサー情報は、入力を介して ECU に入力されます。 考えられる入力信号は次のとおりです。速度センサー;温度センサー;荷重(負圧)センサー。酸素センサー。入ってきた情報が必ずしも行動に直結するとは限りません。 測定値が目標値からずれている場合にのみ、アクチュエータの制御を調整できます。 ECU には「調整」機能があります。 はい/いいえの決定は、事前にプログラムされたコンピュータ プログラム (ROM / フラッシュ メモリ) によって行われます。 ECUでのプロセス制御 測定する: センサー (この場合はセンサー) は物理量を測定し、それを電気信号に変換します。 この測定値(X)がコントローラに送信されます。 測定値は必ずしもアクションに直接つながる必要はありません。 一定の温度を考えてください。 操縦するには: コントローラー(ECU)はアクチュエーターを制御します。 センサーからのフィードバックがないため、ECU はプロセスシーケンスに従いません。 したがって、プロセス内の障害が常に認識されるわけではありません。 制御の例としては、ホーン (W) を手動で操作することが挙げられます。 ECUはスイッチ操作時にホーン(Y)を制御します。 ホーンには制御機能がないため、故障(Z)は認識されません。 配置する: コントローラーは手動コマンド (W) または測定されたセンサー値 (X) を処理してアクチュエーター制御に組み込むことができます。 アクチュエータはプロセスに変化を引き起こします。 たとえば、注入時間を考慮してください。 より多くの量を注入することは、より濃厚な混合物を意味する。 酸素含有量はラムダセンサーによって測定され、この測定値 (X) がコントローラーに送信されます。 予期せぬ障害が存在する場合 (インジェクターの詰まりなど)、これによりプロセスに変化 (Z) が生じます。 この偏差もセンサーによって測定されるため、コントローラーはアクチュエーター制御によってプロセスを調整できます。 動作条件に基づいたプロセス制御:内燃機関のエンジン管理システムは、あらゆる動作条件下で混合気を最適に燃焼させる必要があります。 混合気の組成と点火時期を決定することは、排気ガスの組成(排出)、経済性を保証し、望ましい出力を達成するために非常に重要です。それぞれの動作条件には独自の制御テクノロジーがあります。コールドスタート:混合気が濃厚で点火が遅い。ウォームスタート: 混合気の濃度はコールドスタート時よりも低くなります。冷間アイドリング: 混合気が濃厚になり、アイドリング速度が上がります。ホットアイドリング: アイドリング速度が低いと混合気が少なくなります。部分負荷: 混合気は理論混合、速度範囲は 1500 ~ 4000 rpm、点火時期は事前定義されており、ラムダ制御がアクティブです。全負荷: 混合物が濃縮され、負荷と速度が高くなります。加速: 混合気が豊富、点火が遅い。減速: 混合気が希薄、点火が早い。 プロセス制御のフローチャート 関連ページ: ECU とデジタル エレクトロニクスの概要ページ。 インターフェース回路。 ECUの動作。