科目:
- ポテンショメーター
- 耐性の進行
- 信号電圧
- 分圧器
- ミラー調整用ポテンショメータ
- スロットル調整モーター用ポテンショメータ
ポテンショメータ:
ポテンショメータは、ポテンショメータまたは角度センサーとも呼ばれ、アクセル ペダル、スロットル バルブ、タンク レベルなどの位置センサーとして自動車技術でよく使用されます。 ランナー (滑り接触) は調整可能な部品によってカーボン トラック上を移動します。 抵抗変化 が得られるので、位置を特定することができる。 以下の XNUMX つの画像は、実際のポテンショメータ、ポテンショメータの部品、およびポテンショメータのシンボルを示しています。

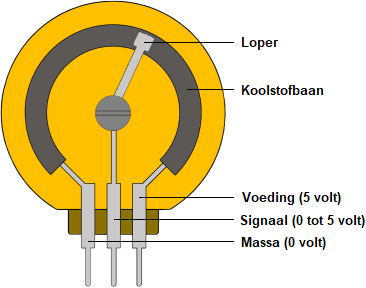
ランナーがカーボン トラック上の別の位置に回転すると、信号接続の抵抗が変化します。 ただし、制御デバイスは抵抗を「読み取る」ことはできません。 制御装置は、5 ボルトの基準電圧とアースをポテンショメータの 5 つの外部接続に切り替えます。 電流がカーボン トラックを流れるため、カーボン トラックの 5 ボルトの電圧が消費されます。 入力の電圧は 0 ボルト、出力の電圧は 2,5 ボルトでした。 カーボントラックの途中で、電圧の半分が消費されます。ここでの電圧は基準電圧の半分、つまり XNUMX ボルトです。 ワイパーと信号接続を介して制御ユニットに送信される電圧は、度数上の位置を正確に決定するために十分な情報を制御ユニットに提供します。 これは、とりわけ、次の目的で使用されます。 アクセルペダルとスロットルポジションセンサー。
オンボード電圧はすべての動作条件で 5 ボルトを超えるため、5 ボルトの電圧は一般的に使用される値です。 重要なセンサーが 12 ボルトの電圧で動作すると、エンジン始動時に誤動作する可能性があります。平凡なバッテリーを使用した場合、冬場の始動電圧は 10 ボルトに低下する可能性があります。
別の可能性は、ポテンショメータが、たとえばオペアンプを備えた電気回路に電圧を供給することです。 ヘッドライト調整。 その場合、ポテンショメータは 12 ~ 14 ボルトの電圧で動作します。
ポテンショメータは多くの場合 270 度回転します。 ここでは、線形勾配を持つポテンショメータを想定しています。 アニメーションは、ランナーの XNUMX つの異なる位置での出力電圧を示しています。
- 0度:0ボルト
- 45度:0,8ボルト
- 90度:1,7ボルト
- 135度:2,5ボルト
- 180度:3,3ボルト
- 225度:4,2ボルト
- 270度:5ボルト
実際には、出力電圧はカーボン トラック上のランナーの回転角度ごとに変化します。
- 合計ストロークは 270 度です。
- 抵抗値は10kΩ(10.000Ω)です。
- 回転角度ごとに、抵抗は 37 Ω 変化します。
- 電圧は回転角度ごとに 18,5 mV (0,0185 V) 変化します。
上のアニメーションでは、ツイスト 0% で信号電圧が 0 ボルト、100% で 5 ボルトであることがわかります。 ただし、これは逆の場合もあります。0% ツイスト 5 ボルトと 100% 0 ボルトです。
耐性の進行:
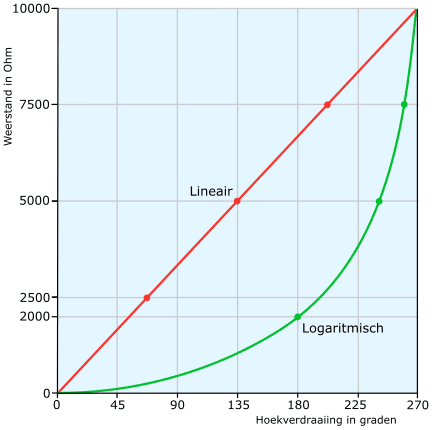
線形ポテンショメータでは、角度回転の各角度が特定の固定値に対応します。 たとえば、270° 回転できる 270 Ω のポテンショメータでは、回転角度ごとに 1 Ω の抵抗の差が生じます。 対数ポテンショメータを使用すると、抵抗変化は直接比例するのではなく、徐々に変化します。
次の画像では、前の段落のポテンショメータの直線進行 (赤) が表示されます。 さらに、他のタイプのポテンショメータの対数数列 (緑色) も見ることができます。 対数ポテンショメータは主に物理プロセスをシミュレートするために使用されます。
これらのポテンショメータの信号電圧は抵抗に比例します。
信号電圧:
ポテンショメータは次の方法で接続されます。
- 制御ユニットからの 5 ボルトの供給電圧。
- 制御ユニット経由の質量は 0 ボルト。
- ランナーは、0 ~ 5 ボルトのアナログ電圧を制御ユニットの信号接続に送信します。
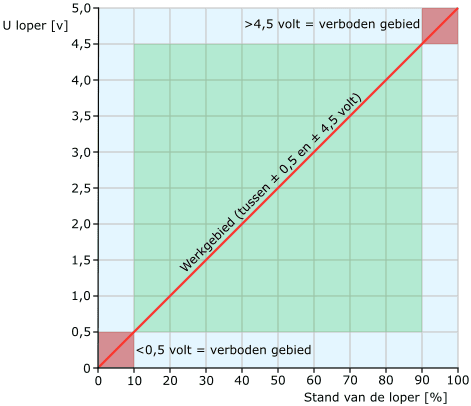
ポテンショメータの動作範囲は 0,5 ~ 4,5 ボルトです。 メーカーは、たとえば 0,4 ~ 4,6 ボルトなど、他の極端な値を選択することもできます。 ポテンショメータからの信号は、この動作領域を超えてはなりません。 制御部は信号電圧が禁止領域に入ったことを検出すると、不正と認識しエラーコードを記憶します。
- 信号電圧 5 ボルト: アース線またはプラス回路の遮断を示します。
- 信号電圧 0 ボルト: 電源線の断線またはアースの短絡を示します。
信号の信頼性を確保するために、アクセルペダルまたはスロットルバルブにはダブルポテンショメータが使用されています。 信号は(図のように)相互に垂直にミラーリングすることも、異なる電圧レベルで比例的にミラーリングすることもできます。 いずれにせよ、それらは同じではない可能性があります。 ECU は信号電圧を比較します。
ECU が XNUMX つのポテンショメータのうちの XNUMX つで非現実的な信号 (スパイク、または信号が禁止領域に入った場合) を検出すると、いわゆる緊急モードに入り、XNUMX 番目の信号を使用します。
ページ上: アクセルペダルとスロットルバルブ 「スロットルバイワイヤ」やエラーのある信号のスコープ画像など、ポテンショメータのアプリケーションについて詳しく説明します。
OOK ZIE: センサーの種類と信号。

分圧器:
抵抗で構成される直列回路は分圧器として機能します。 電源電圧は、この直列回路内の抵抗にそれぞれ分配されます。 分圧器。 最小の抵抗器の電圧降下は最小になり、最大の抵抗器の電圧降下は最大になります。
以下の画像は、12 ボルトの電圧源に接続されたポテンショメータの実際の状況と回路図を示しています。 ポテンショメータのランナーは半分です。 中央の画像には、ポテンショメータが概略的に示されています。 右側には、接続 3 を間に挟んだ XNUMX つの個別の抵抗を備えた分圧器が表示されます。XNUMX つの図は互いに等価です。
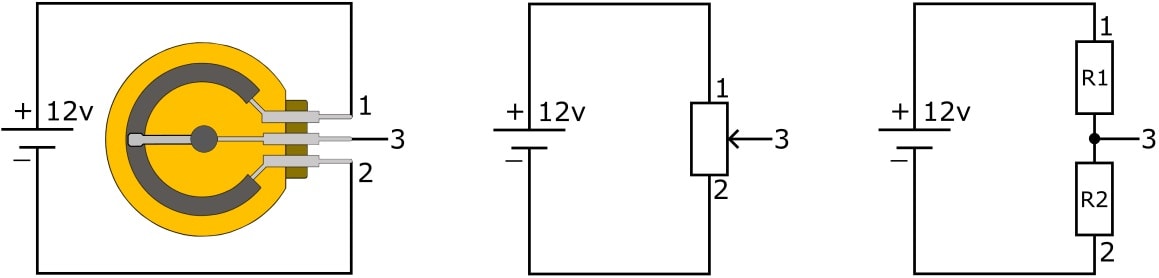
ポテンショメータの抵抗値は固定されているため、抵抗値の合計 (R1 + R2) は合計抵抗値と等しくなります。 ランナーの動きによりR1、R2の抵抗値が変化します(右図)。 ワイパーが上部にあり、抵抗値 R3 が小さい場合、ピン 1 の出力電圧は高くなります。
ミラー調整用ポテンショメータ:
386 つの電気モーターにより、ミラー ガラスの水平および垂直調整オプションが提供されます。 最新の車両では、制御は制御装置を介して行われます。 下の図では、この制御ユニット (JXNUMX) が示されています。 コントロールユニットは、次の場合にすぐにアクチュエーターを作動させます。
- ドライバーがミラー調整ボタンを操作するか、または:
- リバースギアをシフトし、ミラーガラスを下に向ける必要があります(通常は助手席側)。
- メモリ機能により別の希望の位置に設定する必要があります。 これは通常、キー (リモコン) によって識別されます。
- 技術者は、読み出しコンピュータを使用したアクチュエータ テストを通じてアクチュエータ モータを制御します。
ミラーガラスを所望の位置に配置するには、ミラーガラスの位置を認識する必要がある。 ポテンショメータ G791 および G792 は、灰色/黄色および青色/赤色のワイヤを介して信号を制御ユニットに送信します。 XNUMX 人の異なるドライバーのミラー位置がそれぞれのキー番号に保存されている場合、該当のドライバーがリモコンでドアのロックを解除するとすぐに、アクチュエーターが正しい位置に調整されます。 ミラーガラスの正しい位置に加えて、通常、電動ステアリングコラムの調整とシート位置の調整(存在する場合)も設定位置に設定されます。 ページ上: ドアミラーとミラー調整 ミラー調整モーターの制御方法について説明します。
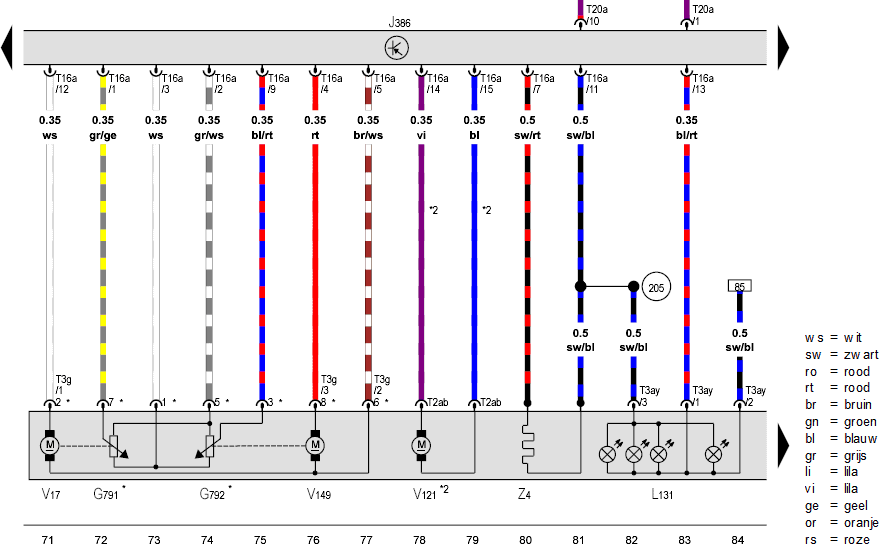
凡例:
- J386: ドアコントロールユニット;
- V17: 水平ミラーガラス調整用モーター。
- G791: 水平ミラーガラス調整ポテンショメータ。
- G792: 垂直ミラーガラス調整ポテンショメータ;
- V149: 垂直ミラー調整用モーター。
- V121:モーターミラー折りたたみ機能。
- Z4: ミラー加熱要素。
- L131: ドアミラーハウジング内のインジケーターランプ。
上記では 電気図 電動モーターV121(ミラー折り畳み機能)も見えます。 折りたたみ機能には中間位置が必要ないため、位置センサーからのフィードバックは必要ありません。 結局のところ、鏡は展開されているか折りたたまれています。 終了位置に到達すると、電気モーターの電流が増加し、ECUは終了位置に到達したことを「認識」し、制御を終了します。
スロットル調整モーター用のポテンショメーター:
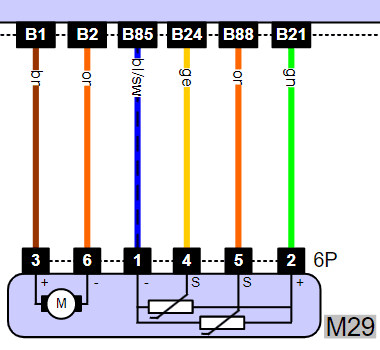
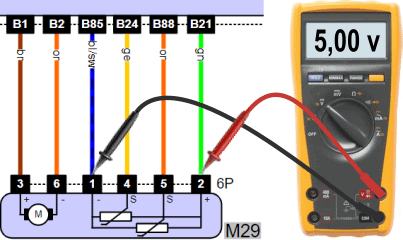
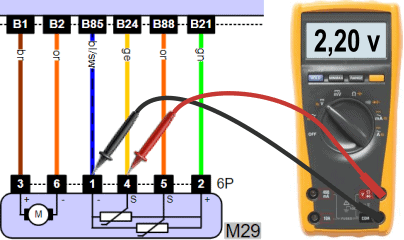
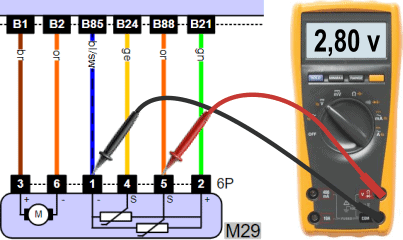
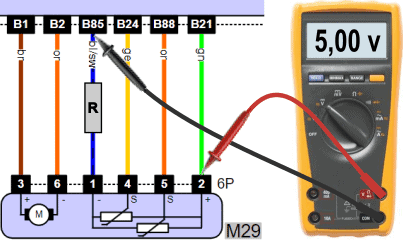
スロットル調整モーターのポテンショメータは、このページで以前に例として使用しました。 次の図は、アクチュエータ (左) と、共通の電源とグランドおよび XNUMX つの信号接続を持つ XNUMX つのポテンショメータ (右) を示しています。 信号接続 (ポテンショメータ プラグのピン 4 および 5) は、異なる電圧プロファイルの信号を提供します。
- 異なる電圧レベルでの進行は線形であり、電圧は同時に上昇および下降します。または、
- 信号電圧は互いに逆になります。
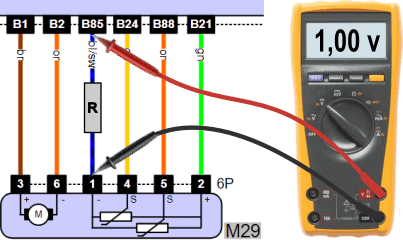
以下の 5 つの画像は、スロットル ポジション センサーとその結合電源とアースの XNUMX つの測定結果を示しています。 供給電圧は再び XNUMX ボルトで、信号電圧は許容範囲内です。
故障時には信号電圧が異なる可能性があります。 次の XNUMX つの状況が考えられます。
- 信号線の XNUMX つに障害があります。 ECU は XNUMX つの信号電圧を比較するため、この誤った信号を認識し、リンプ モードになります。 これにより、エンジン管理ライトが点灯し、エンジン出力が低下します。
- 電源またはアース線には過渡抵抗が含まれています。この場合、問題の線で電圧損失が発生します。これは、つまり、 どちらも ポテンショメータが発する信号が低すぎる。 信号電圧は相互に比較され、相互に相対的であるため、 niet 異なります。これはECUによって決定されます niet 認識された。 低すぎる信号電圧は ECU によって受け入れられ、スロットル バルブが正しく制御されなくなります。 ECU は、希望の位置に到達するまでスロットル バルブ アクチュエータを制御し続けます。 これにより、希薄すぎる混合気 (ポジティブ燃料トリム) による空気供給に関連するセンサーやアクチュエーターの故障、ラムダ回路の故障、MAP センサーまたは EGR に関連する故障が発生する可能性があります。
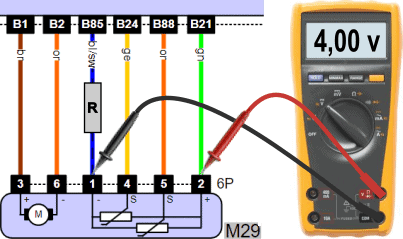
上記の状況の誤動作は、ECU のコネクタのピン B85 とスロットル バルブのコネクタのピン 1 の間のアース線を交換することで解決できます。