科目:
- はじめに
- インバーター
- 回生ブレーキ
導入:
完全電気推進またはハイブリッド推進を備えた車両の電気モーターは、交流 (AC) で動作します。 バッテリーは直流電圧 (DC) のみを供給するため、電気モーターのエネルギーはバッテリーから直接供給されません。 バッテリーからの DC 電圧は、 インバーター 電気モーター用の交流電圧に変換されます。
さらに、 コンバータ 低い DC 電圧を高い電圧に変換します (昇圧コンバータ)。バッテリー電圧は、電気モーター用に「昇圧」することも (650 ボルト)、車載バッテリーの充電用に下げることもできます (14 ボルト)。このコンバータは、たとえば室内付属品 (乗用車または大型商用車) に 12 または 24 ボルトの電圧を供給するなど、高電圧から低電圧に切り替えるためにも使用されます。 コンバーターのページはこちら。
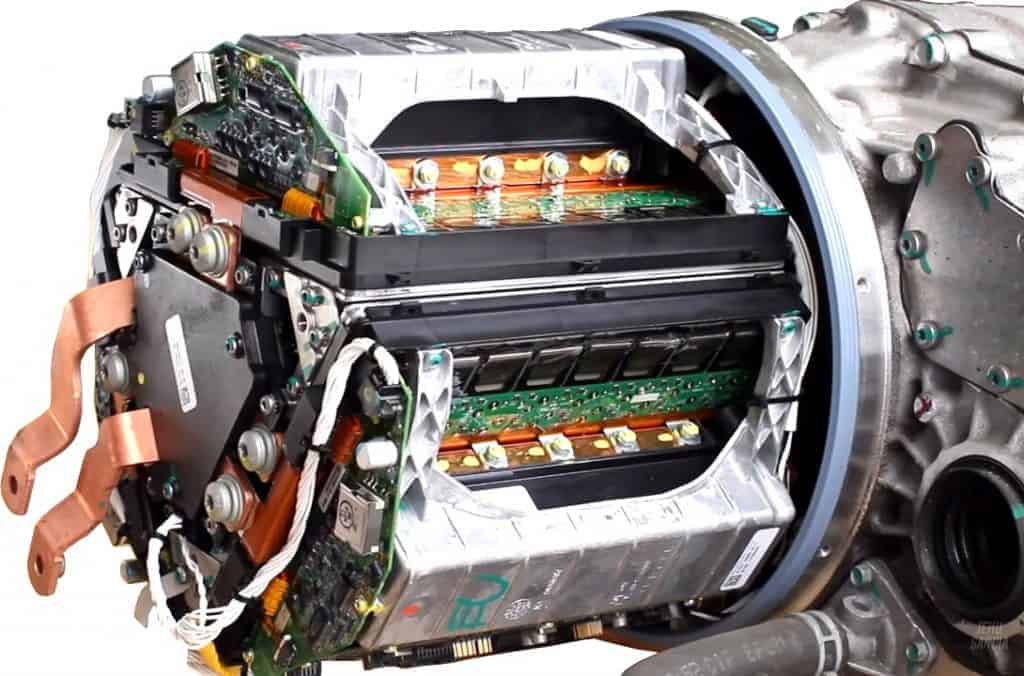
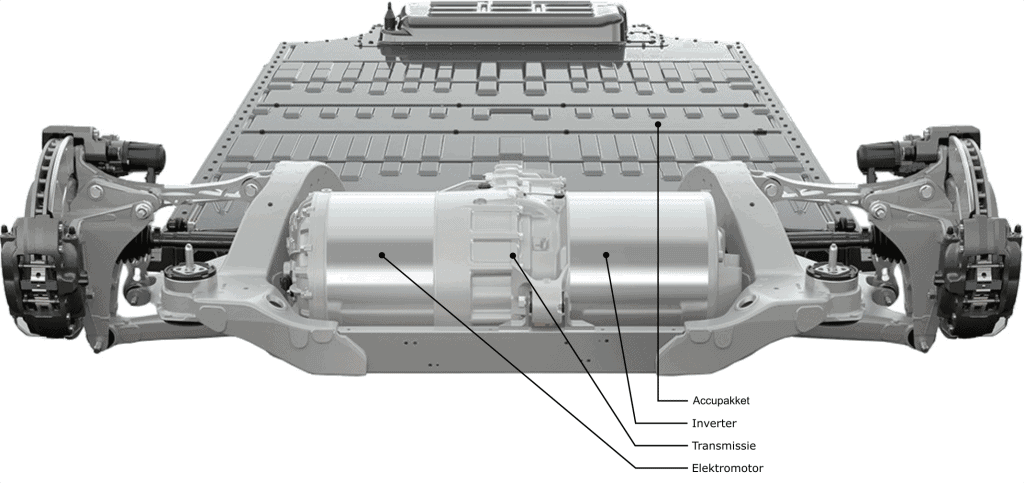
次の画像は Tesla Model S です。インバーターの内部と、インバーター、トランスミッション、電気モーターがリア サスペンションのジョイント ユニットに配置されている、いわゆる「ドライブ ユニット」の概要です。
インバーター:
「昇圧コンバータ」セクションの画像は、昇圧コンバータ、1 個の IGBT を備えたインバータ、および 2 個の電気モーター (MGXNUMX および MGXNUMX) の概要を示しています。
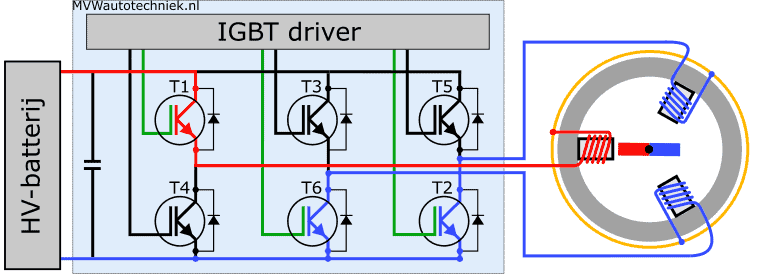
下の 2 つの図は、トランジスタの制御とステーター コイルに出入りする電流の方向を示しています。便宜上、昇圧コンバータと IGBT + MGXNUMX は省略しています。図の左側に表示されます HVバッテリーパック;これは、約 200 ~ 800 ボルトの電圧が蓄えられている高電圧バッテリーです。バッテリーの右側にはコンデンサーが見えます。 HV システムが作動すると、HV 保護システムは最初に抵抗器を使用して HV バッテリー パックからの制限された電流を制御します。これは、HV システムが完全に動作する前に、コンデンサをゆっくりと充電するために行われます。
さらに、6 つの高出力トランジスタが見えます。これらは電気モーターを制御する IGBT です。 IGBT は制御ユニットによって制御されます。これは「IGBTドライバ」と表示されます。右側には、青と赤の 3 つのコイル (U、V、W) を備えたステーターが表示されます。ステーターの中央には磁気によって作動するローターがあります。電気モーターに関する段落を参照してください。
上部のトランジスタ (T1、T3、および T5) は、制御ユニットによってトランジスタがオンになると、HV バッテリーからステーター コイルへの正の接続を切り替えます。 下部のトランジスタ (T2、T4、および T6) は、質量を高電圧バッテリーのマイナスに導通します。
現在制御されている IGBT のゲート接続は緑色で表示されます。 同期モーターの場合、コントロールユニットはモーターの位置を「読み取り」ます。 ローター位置センサー どの IGBT を制御するかを決定します。 ローター位置センサーは、ローターポジションセンサーとも呼ばれます。 リゾルバ 呼ばれます。
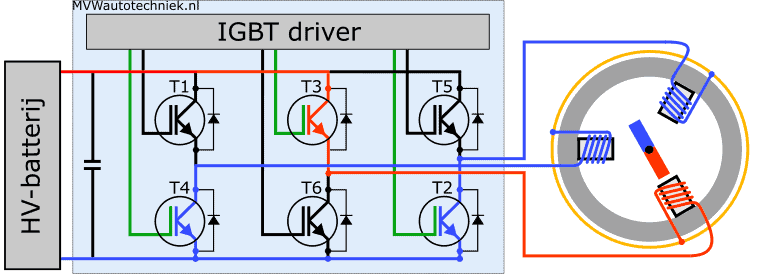
1. 制御された IGBT:
- T1: プラス (100% 制御);
- T2: 質量 (50% 駆動)。
- T6: 質量 (50% 駆動)。
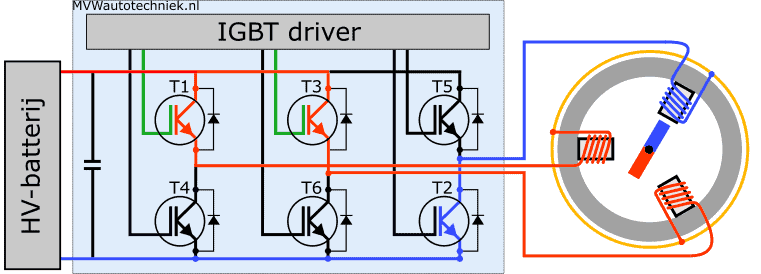
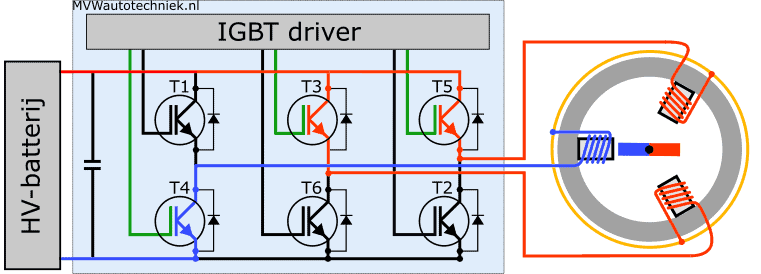
2. 制御された IGBT:
- T1: プラス (50% 制御);
- T3: プラス (50% 制御);
- T2: 質量 (100% 駆動)。
変化した磁場の結果としてローターが回転します。
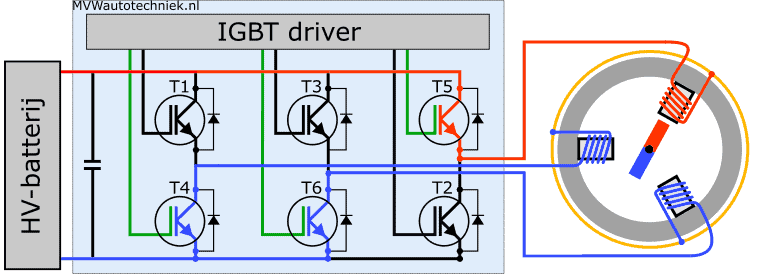
3. 制御された IGBT:
- T3: プラス (100% 制御);
- T2: 質量 (50% 駆動)。
- T4: 質量 (50% 駆動)。
変化した磁場の結果としてローターが回転します。
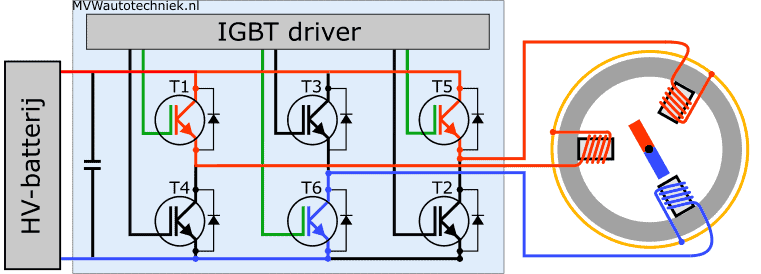
4. 制御された IGBT:
- T3: プラス (50% 制御);
- T5: プラス (50% 制御);
- T4: 質量 (100% 駆動)。
変化した磁場の結果としてローターが回転します。
5. 制御された IGBT:
- T5: プラス (100% 制御);
- T4: 質量 (50% 駆動)。
- T6: 質量 (50% 駆動)。
変化した磁場の結果としてローターが回転します。
6. 制御された IGBT:
- T1: プラス (50% 制御);
- T5: プラス (50% 制御);
- T6: 質量 (100% 駆動)。
変化した磁場の結果としてローターが回転します。
7. 制御された IGBT:
- T1: プラス (100% 制御);
- T2: 質量 (50% 駆動)。
- T6: 質量 (50% 駆動)。
ローターは状況 360 の状況から 1 度 (1 回転) 回転しました。トランジスタ回路のサイクルが再び繰り返されます。
インバータは、HV バッテリからの DC 電圧を 1 相正弦波交流電圧に変換します。 以下の XNUMX つの画像は次のことを示しています。
- 左: コイルをロードします。
- 中: コイルの放電。
- 右: コイルの充放電曲線。
方形波電圧でトランジスタのベースを駆動することで、コイルの充電と放電を実現します。 コイルが放電すると、磁場が低下し、誘導電圧によって短時間の誘導電流が発生します。 消火ダイオードによりコイルが確実に放電されます。

単相正弦波形状は、トランジスタが導通するデューティ サイクルを変更することによって得られます。 以下のテキストは、以下の画像に関するものです。
- 左: この周波数ではコイルは十分に充電できず、平均電圧が発生します。
- 右: デューティ サイクルは IGBT コントローラーによって調整されます。 充電と放電の時間によって、コイルを流れる電流の量が決まります。
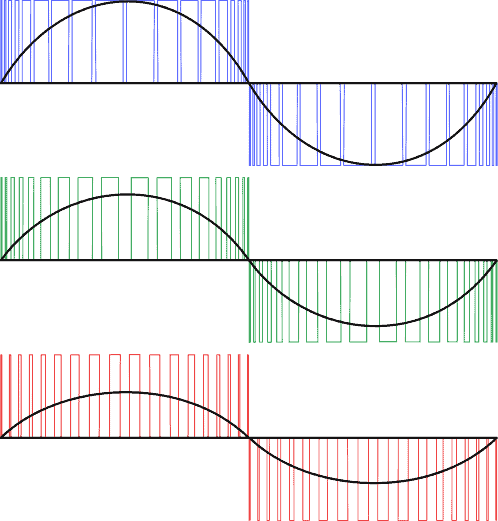
インバーター内の IGBT は継続的にオン/オフされます。 スイッチのオンとオフの比率は、PWM 制御に従って行われます。 パルスが広いほど (デューティ サイクルが高いほど)、コイルを流れる電流が大きくなり、電気モーターがより強力になります。 平均電流は黒い正弦波で示されます。 次の図は、XNUMX つの正弦波制御信号を示しています。
- 青: コントロール性が高い。 デューティサイクルは高いです。 電流は最大になります。
- 緑: 平均的なコントロール。 デューティ サイクルのパーセンテージは、高制御の場合よりも低くなります。 したがって、電流は低くなります。
- 赤: コントロールが低い。 再びデューティサイクルのパーセンテージが低下しました。 電流強度は最大制御と比較して半分になっています。
正弦波は周期の半分が正で、残りの半分が負です。 DC-AC インバータ内の IGBT は、直流電圧 (DC) が交流電圧 (AC) に変換されるように接続されています。 ステータコイルを流れる電流の方向は周期的に反転します。
単位時間あたりの正弦波の数が増加すると、ローター速度が増加します。
以下のアニメーションはインバータの制御を示しています。 インバーターの下には、360 つのフェーズの時間経過が表示されます。 アニメーションではローターが 1 回転 (6 度) 回転します。 各回転は XNUMX つの時間単位 (XNUMX ~ XNUMX) に分割されます。 以下に色付きのバーが表示されます。
- ダークブルー:T1
- 緑:T2
- ライトブルー:T3
- オレンジ:T4
- ピンク:T5
- 赤:T6
時間の経過の前半の回転に焦点を当てます。
- 0 度から 180 度まで、ローターは半回転します。 この期間中に IGBT T1 が制御されました。
- 0 ~ 60 度の間では、T1 に加えて、T5 および T6 もアクティブでした。
- T1 はプラス、T5 と T6 はグランドを切り替えます。 各トランジスタには独自のデューティ サイクルがあり、50 ~ 100% の間で変化します。
- 60 度では、T2 が T5 から引き継ぎます。つまり、コイル内の電流の方向が逆になります。
- その瞬間、交流電圧が発生します。電流の方向が変化したため、電流の強さは負になります。
インバータを使用して AC 同期電動機の正しいコイルを制御するために、インバータは、インバータからの信号を調べます。 リゾルバ。 レゾルバは、静止時と回転時の両方のローターの位置を記録します。
回生ブレーキ:
エンジンをブレーキするときは、電気モーターが発電機(ダイナモ)として使用されます。 車両の運動エネルギーが電気エネルギーに変換され、バッテリーが充電されます。
IGBT は回生ブレーキ中はオフになります。ドライバーは IGBT を制御しません。 IGBT のソースとドレイン間の整流ダイオードは、モーターからの AC 電圧をバッテリーの DC 電圧に変換する整流器として機能します。
完全電気自動車およびハイブリッド自動車には、電気ブレーキのオプションに加えて、ブレーキパッドとブレーキディスクでブレーキをかける従来の油圧ブレーキシステムも搭載されています。さまざまなテクニックと制御原理については、次のページを参照してください。 電気自動車のブレーキ。
OOK ZIE: