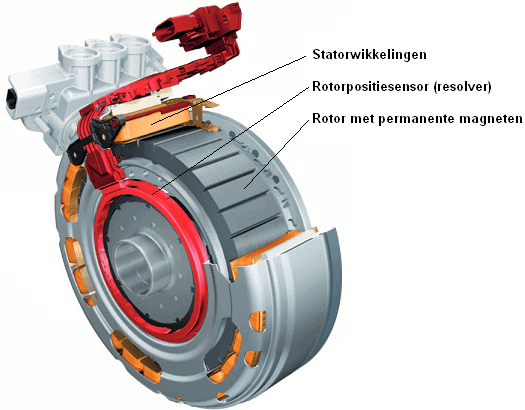
Introduzione: Per il funzionamento del motore elettrico sincrono è essenziale che il corretto lavaggio attraverso il invertitore sono controllati. Per determinare quale bobina (U, V o W) deve essere eccitata, la ECU dell'inverter legge la posizione del rotore, che viene misurata dal sensore di posizione del rotore, chiamato anche “resolver”.
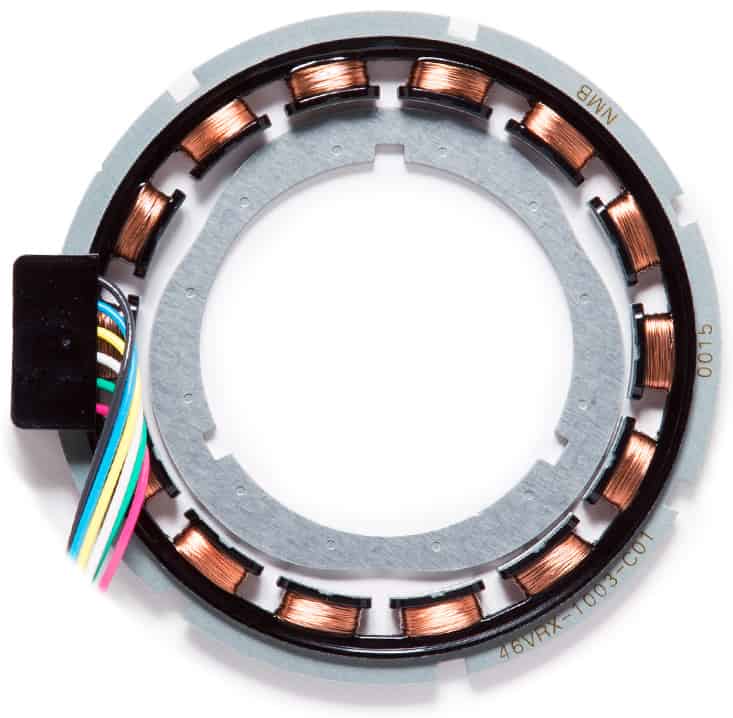
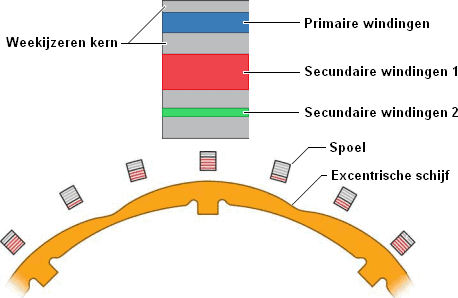
Il risolutore è costituito da un anello esterno con una serie di bobine all'interno di una piastra eccentrica rotante. La distanza tra la piastra eccentrica e le bobine cambia costantemente durante la rotazione.
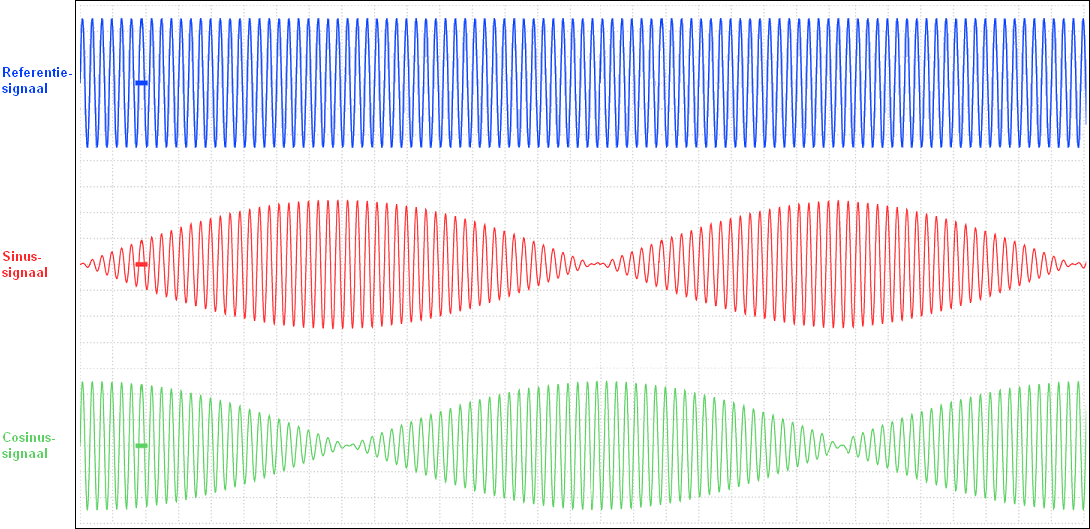
Segnali dal risolutore: L'ECU fornisce al risolutore un segnale di riferimento. Il traferro tra una bobina e l'eccentrico crea una tensione alternata sinusoidale alta o bassa. Con un'ampiezza elevata del segnale sinusoidale rosso o verde (vedere la figura seguente), il traferro tra l'eccentrico e la bobina è piccolo.
Il risolutore funziona sia da fermo che con il motore elettrico in funzione: in entrambi i casi la ECU deve sapere in quale posizione si trova il rotore. L'immagine sotto mostra i segnali teorici. In realtà la frequenza è molto più alta, quindi la variazione nell'ampiezza dei segnali seno e coseno è chiaramente visibile.
Le due immagini seguenti mostrano una misurazione effettiva su un risolutore. Anche qui vediamo il segnale di riferimento in alto, e i segnali seno e coseno in basso. La prima immagine è ferma: il motore elettrico non funziona. L'altezza del segnale seno e del segnale coseno rimane costante. In base al livello di questa tensione alternata, l'ECU sa dove si trova il rotore quando è fermo.
Segnalazioni da parte del Resolver in stato di fermo
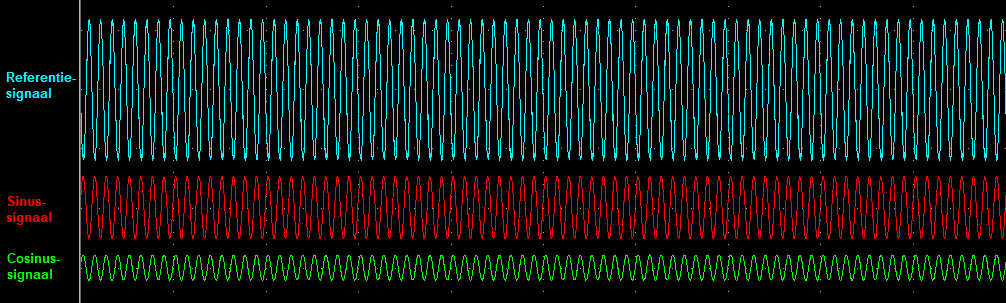
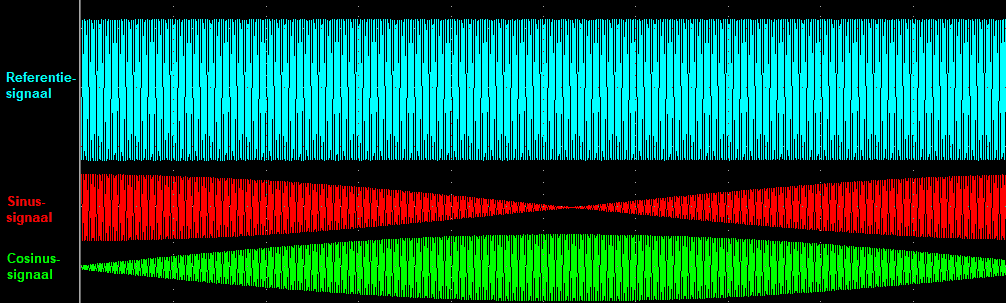
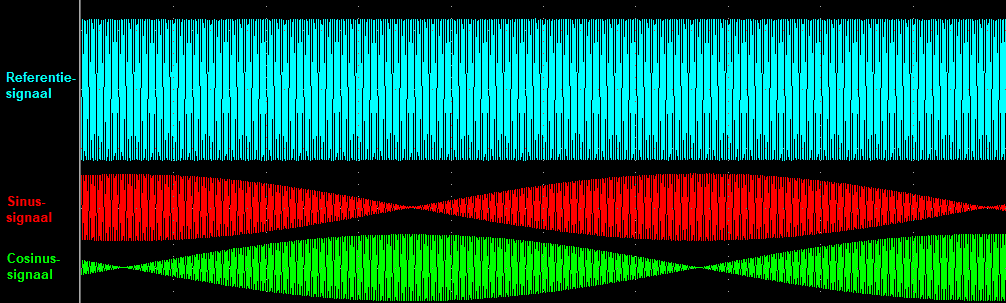
Nelle due immagini successive il tempo per divisione è stato ridotto. La frequenza del segnale di riferimento sul risolutore rimane invariata, ma misurata su un periodo di tempo più ampio nella misurazione. Di conseguenza, vediamo che le ampiezze dei segnali seno e coseno cambiano chiaramente. La prima immagine è stata misurata a una velocità del rotore bassa e la seconda a una velocità maggiore. All'aumentare della velocità, la frequenza dei segnali seno e coseno aumenta (più segnali per unità di tempo), ma l'ampiezza (il livello della tensione alternata) rimane costante.
Segnali Resolver: velocità bassa
Segnali Resolver: velocità aumentata
Componenti del risolutore: Il risolutore della VW E-Golf contiene 30 bobine collegate in serie. Ciascuna bobina del risolutore è costituita da un nucleo di ferro dolce con tre diversi avvolgimenti: primario, secondario 1 e secondario 2.
La bobina primaria (blu) è alimentata con una tensione alternata ad alta frequenza.
Il numero di spire secondarie (1 rossa, 2 verdi) è diverso su ciascuna bobina.
Quando la camma della piastra eccentrica si muove lungo la bobina, l'induttanza negli avvolgimenti secondari viene amplificata. A causa del numero di spire degli avvolgimenti secondari 1 e 2 in ciascuna bobina risultano anche tensioni diverse negli avvolgimenti secondari. L'ECU nell'inverter può calcolare la posizione del rotore in base alle tensioni degli avvolgimenti secondari 1 e 2.
L'adattamento del risolutore al rotore è molto preciso: molti produttori prescrivono la sostituzione dell'intero motore elettrico se si verificano problemi con il risolutore. Dopo aver smontato (accidentalmente) il risolutore o allentato i bulloni all'esterno dell'alloggiamento del motore elettrico, non è più possibile rimontare correttamente il risolutore. Anche in questo caso molti produttori prescrivono la sostituzione del motore elettrico.
La posizione esatta del rotore di a motore sincrono deve essere conosciuto a veicolo fermo e durante la guida. Se il sensore è difettoso, il veicolo non può più circolare.
Van de motore asincrono non è invece necessario alcun monitoraggio della posizione del rotore. Il sensore di posizione del rotore emette quattro impulsi per giro del rotore. Questa misurazione monitora la quantità massima di scorrimento tra il campo magnetico rotante tra lo statore e il rotore. Come sensore viene spesso utilizzato il sensore Hall. Il sensore Hall trasmette impulsi all'ECU quando il rotore gira, ma non può eseguire una misurazione da fermo, a differenza del risolutore del motore sincrono. Talvolta i produttori scelgono di utilizzare il risolutore del motore sincrono anche come sensore di posizione del rotore.