Soggetti:
- Introduzione
- Motore elettrico AC (sincrono, a magneti permanenti)
- Controllo AC del motore sincrono
- Motore elettrico AC (asincrono, motore a gabbia di scoiattolo)
- Mappa del rendimento del motore elettrico sincrono e asincrono
Introduzione:
Un motore elettrico viene utilizzato per azionare un veicolo ibrido o completamente elettrico. Il motore elettrico converte l'energia elettrica (dalla batteria o dal range extender) in movimento per azionare le ruote. Inoltre, il motore elettrico può anche convertire l'energia cinetica in energia elettrica durante la frenata del motore: frenata rigenerativa. In questo caso il motore elettrico funziona come una dinamo. Per queste due funzioni chiamiamo il motore elettrico anche “macchina elettrica”.
Le opzioni per posizionare il motore elettrico in un veicolo ibrido sono:
- Sul motore a scoppio, dove la trasmissione è ottenuta tramite multicinghia o direttamente tramite l'albero motore;
- Tra motore e cambio: l'albero di ingresso del cambio è azionato dal motore elettrico;
- Integrato nel cambio;
- Sul differenziale;
- Ai mozzi delle ruote (motore del mozzo).
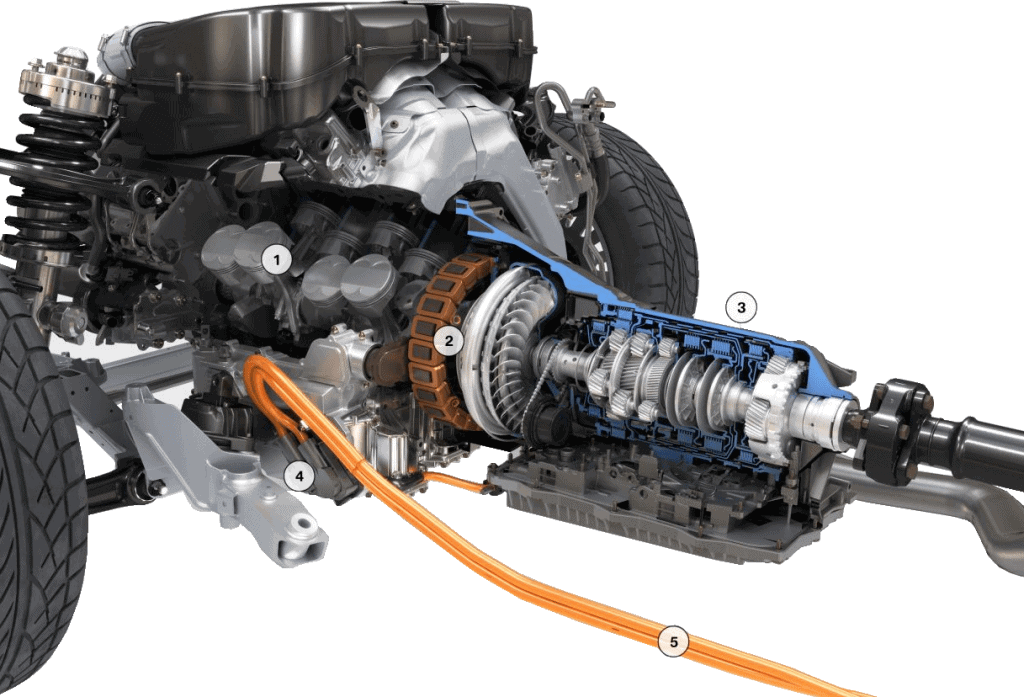
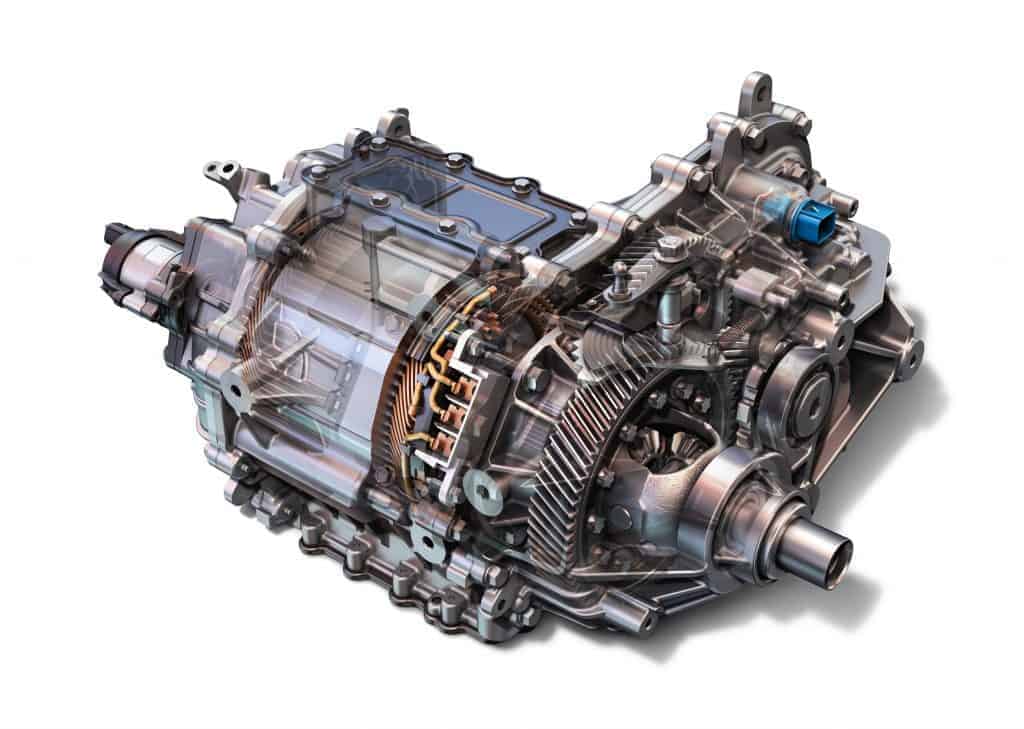
Il motore elettrico di un'auto completamente elettrica è spesso montato sull'asse posteriore. L'immagine sotto mostra il motore elettrico con l'inverter in un alloggiamento cilindrico e la trasmissione finale di una Tesla.

Motore elettrico AC (sincrono, a magneti permanenti):
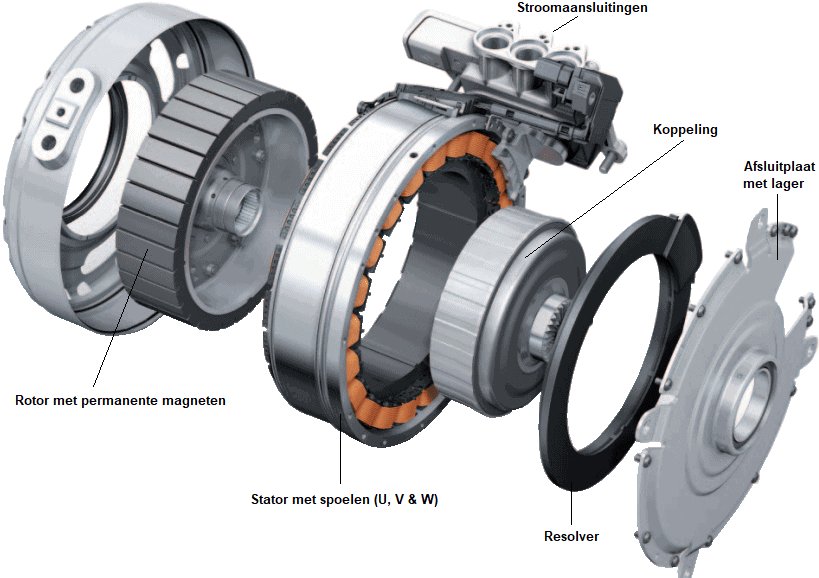
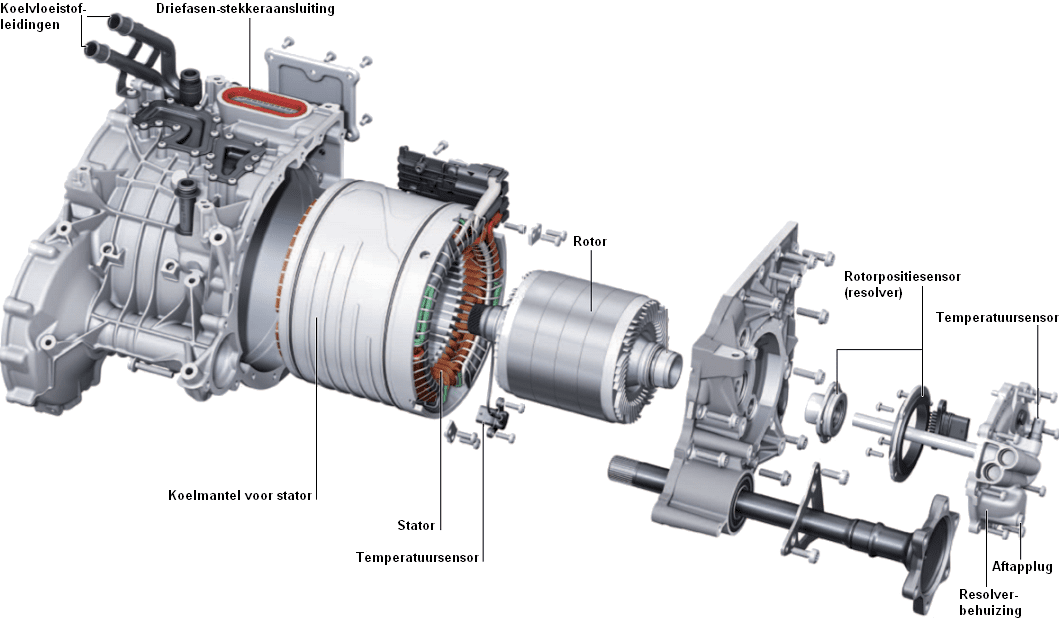
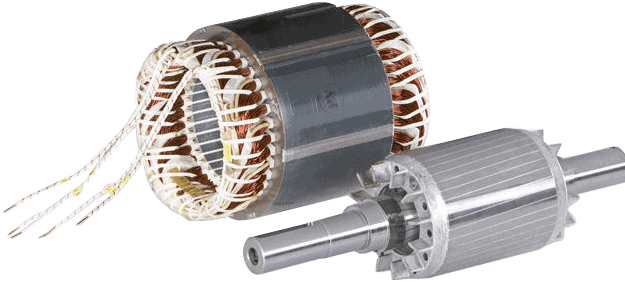
L'immagine seguente mostra le parti di un motore elettrico Audi (sincrono). Questo tipo viene utilizzato nelle varianti ibride di A6 e A8. Elencheremo brevemente i componenti. Tali componenti sono descritti in dettaglio nei paragrafi successivi.
Il rotore con magneti permanenti inizierà a ruotare a seguito di una variazione del campo magnetico nello statore. Il rotore è collegato alla frizione, che può collegare o scollegare il motore a combustione e il motore elettrico (insieme ad una frizione (non mostrata)) in diverse condizioni operative. La posizione del rotore è determinata da risolvere misurato: questi dati sono importanti affinché i driver IGBT possano controllare le bobine dello statore al momento giusto.
Il motore elettrico a magneti permanenti può essere controllato sia in corrente continua (tensione continua) che in corrente alternata (tensione alternata).
Il motore sincrono è uno dei motori elettrici più comunemente utilizzati nei veicoli ibridi o completamente elettrici. Questo tipo di motore elettrico è costituito da uno statore con avvolgimenti e un rotore con diversi magneti permanenti. Il rotore ruota alla stessa velocità del campo magnetico dello statore. Il motore sincrono può essere controllato come segue:
- AC: controllato da un segnale sinusoidale (corrente alternata).
- DC: controllato con segnale quadrato o trapezoidale (corrente continua)
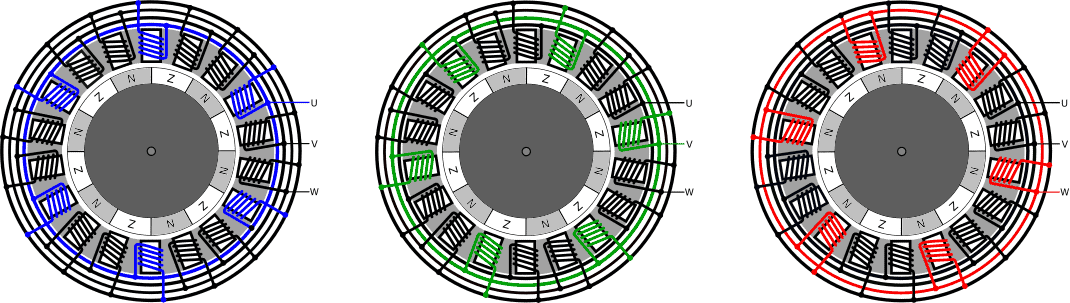
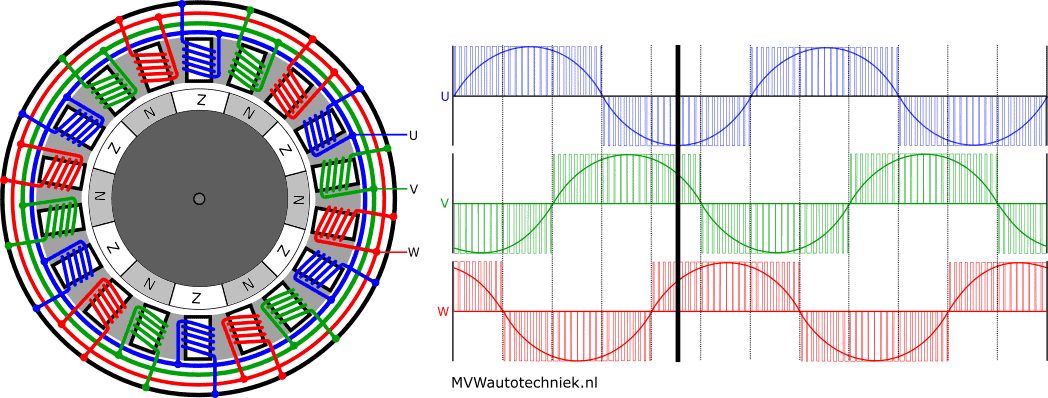
Lo statore del motore sincrono è composto da tre gruppi di bobine statoriche: U, V e W. Ciascun gruppo contiene tre serie di sei bobine collegate in parallelo distribuite su tutta la circonferenza dello statore. Ogni terza bobina appartiene alla stessa serie.
- Bobine a U: blu
- Bobine a V: verde
- Bobine W: rosse
Il rotore contiene diversi magneti permanenti. Eccitando alternativamente le bobine nello statore, viene creato un campo magnetico rotante. Il rotore segue il campo rotante e quindi ruota.
Controllo AC del motore sincrono:
Il controllo CA utilizza il controllo controllato in frequenza o la commutazione sinusoidale. Le bobine dello statore sono alimentate con una tensione sinusoidale trifase alternata per ruotare il rotore.
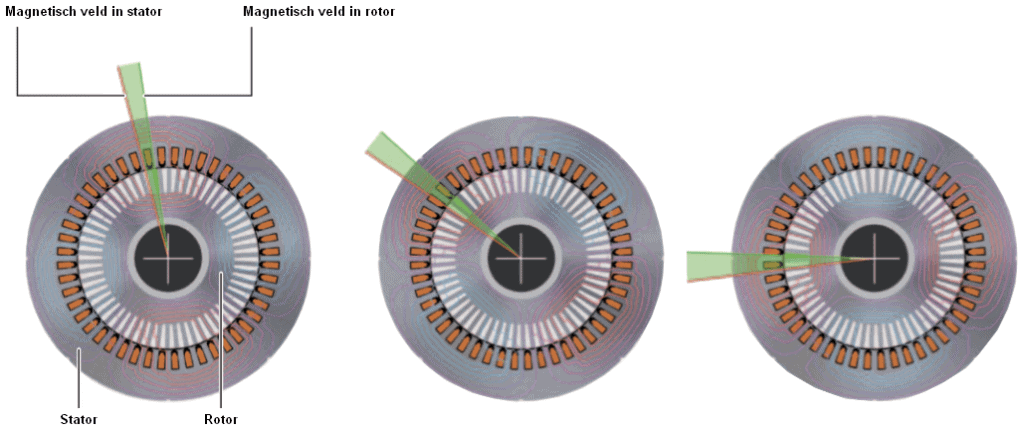
L'immagine sotto mostra la posizione del rotore con una bobina a U eccitata al massimo. Come risultato del campo magnetico, i poli nord si sono posizionati direttamente di fronte alle bobine a U energizzate. Il cursore nel grafico accanto al motore elettrico indica il controllo delle bobine in quel momento.
Per vostra informazione: il rotore nella spiegazione ruota quando si controllano le bobine dello statore senso orario.
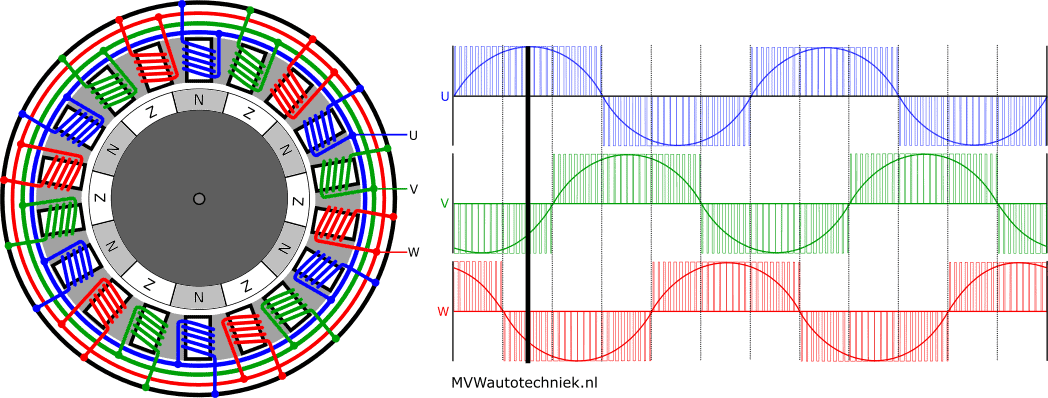
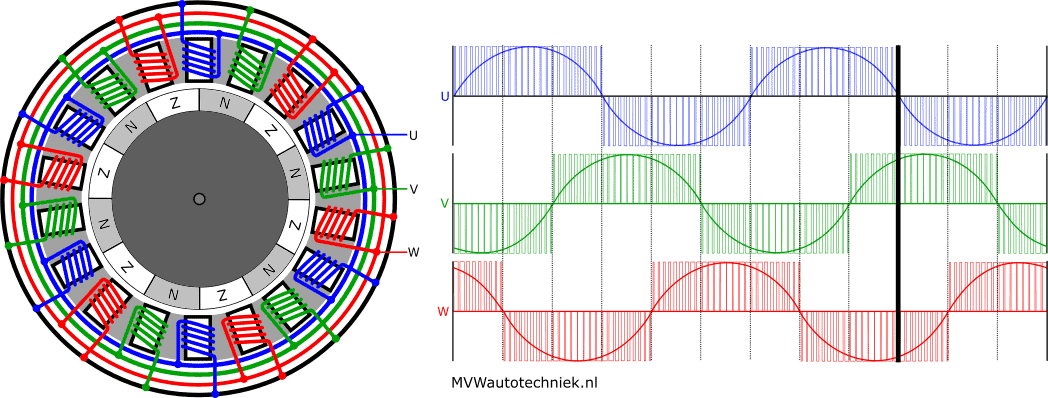
Nell'immagine seguente, l'onda sinusoidale, cioè la corrente alternata attraverso la bobina a U, è al massimo negativa. Durante questo controllo, i poli sud del rotore sono direttamente opposti alle bobine dello statore eccitate (U).
In realtà c'è un piccolo traferro tra i poli nord e sud del rotore. Durante il passaggio dal polo sud al polo nord, la direzione della corrente nella bobina a U cambia. Ulteriore:
- La corrente attraverso la bobina V (verde) è quasi al massimo positiva; anche il polo nord è quasi opposto alla bobina.
- La corrente attraverso la bobina W è stata al massimo negativa e sta aumentando. Il polo sud ha ruotato oltre la bobina.
Per dare un'idea di come scorre la corrente, l'animazione seguente mostra la rotazione del rotore dovuta alla corrente alternata.
Motore elettrico AC (asincrono, motore a gabbia di scoiattolo):
Il motore elettrico a gabbia di scoiattolo o ad armatura di cortocircuito è un motore asincrono. La differenza tra il motore sincrono a magneti permanenti e il motore asincrono sta nel rotore: questo è un tamburo di ferro dolce con conduttori in senso longitudinale. Il rotore funziona in modo asincrono con lo statore, il che significa che esiste una differenza di velocità tra il rotore e la velocità magnetica dello statore. Lo statore è esattamente lo stesso.
Il rotore del motore elettrico asincrono è costituito da bobine cortocircuitate; le bobine U, V e W sono collegate tra loro su un lato. Quando il rotore si trova nel campo rotante dello statore, nelle bobine del rotore viene creata una tensione di induzione. Poiché le bobine del rotore sono cortocircuitate tra loro, la corrente scorre attraverso di esse. Questa corrente fa sì che il rotore generi un campo magnetico, creando una coppia. Poiché il funzionamento del motore elettrico asincrono si basa sulla legge dell'induzione, lo chiamiamo anche motore a induzione.
La coppia erogata influisce sullo scorrimento tra il campo magnetico rotante nello statore e la velocità del rotore.
Il motore asincrono presenta numerosi vantaggi e svantaggi rispetto al motore sincrono.
Vantaggi:
- rotore relativamente semplice, robusto ed economico;
- coppia elevata a bassa velocità.
contro:
- minore densità di potenza (per massa) ed efficienza (efficienza). Le correnti nelle bobine del rotore cortocircuitate provocano ulteriori perdite del rotore;
- la velocità non può essere controllata con precisione perché dipende dal carico. Di per sé questo non deve essere uno svantaggio: con un buon sistema di controllo è possibile regolare anche la velocità del motore asincrono;
- corrente di avviamento elevata.
La posizione del rotore e la velocità del motore asincrono sono misurate da a sensore di posizione del rotore. I sensori Hall spesso forniscono almeno quattro impulsi per giro del rotore per trasmettere la posizione e la velocità del rotore. Non chiamiamo risolutore questo tipo di sensore di posizione del rotore, come nel caso del motore sincrono.
A differenza del motore sincrono, il sensore di posizione del rotore non è necessario per conoscere la posizione del rotore da fermo. La posizione del rotore è importante durante la rotazione: bisogna fare attenzione a garantire che lo scorrimento tra il campo magnetico rotante e il rotore non diventi troppo grande. Quando il campo rotante si muove troppo velocemente, può verificarsi una situazione in cui il rotore vuole improvvisamente girare nella direzione opposta. Le forze che si generano possono essere disastrose per i componenti meccanici ed elettrici.
Alcuni produttori scelgono anche di utilizzare un motore asincrono risolvere applicando. Il motivo mi è sconosciuto. In ogni caso il risolutore è estremamente preciso sia da fermo che in corsa, il che può avvantaggiare la precisione del controllo.
Mappa di efficienza del motore elettrico sincrono e asincrono:
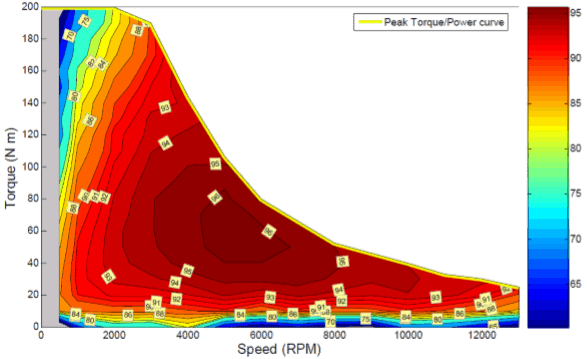
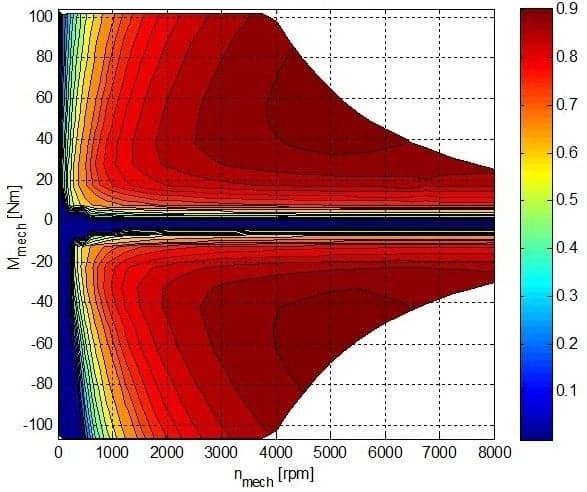
Le immagini sottostanti mostrano l'efficienza del motore elettrico sincrono (a sinistra) e del motore elettrico asincrono (a destra).
- Il motore elettrico sincrono è molto efficiente. L'efficienza è superiore al 90% in una vasta area, con valori di picco fino al 96%. A partire dai 2000 giri/min si verifica un indebolimento di campo che comporta una diminuzione della coppia massima.
- Il motore asincrono ha un'efficienza significativamente inferiore rispetto al motore sincrono a velocità inferiori.
Pagine correlate: