Viðfangsefni:
- ESP almennur
- Önnur nöfn fyrir ESP
- Undirstýri
- Í uppnámi
- Stýrishornskynjari
- Þverhröðunarskynjari (G-skynjari)
- Yaw augnablik skynjari (Yaw skynjari)
- Bremsuþrýstingsnemi
ESP almennt:
ESP er skammstöfun á Electronic Stability Program og virkar ásamt ABS og ASR. Ef ökutækið er búið ABS (anti-lock Braking System) og ASR/ASC (Anti-Slip Regulation / Control) er hægt að bæta við ESP kerfinu með hjálp fjölda aukaskynjara og hugbúnaðarstillingar. Íhlutir eins og hjólhraðaskynjarar og ABS dæla/stýribúnaður eru einnig notaðir fyrir ESP kerfið. ESP kerfið stjórnar einnig lækkun vélarafls; með því að loka inngjöfinni meira, eða með því að slökkva á kveikju.
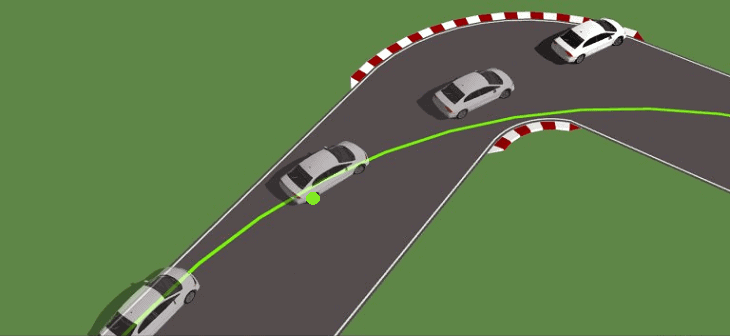
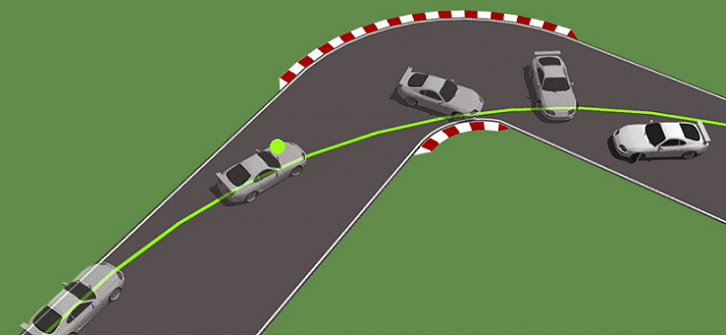
Tilgangur ESP kerfisins er að bæta hegðun í beygju (undirstýringu og yfirstýringu). Þetta á meðal annars við um aðstæður þar sem bremsað er í beygju, eða þegar undanskot á sér stað. ESP-kerfið hemlar einu hjóli ökutækisins, þannig að eðlilegir stýriseiginleikar koma aftur. Hér að neðan eru 2 aðstæður þar sem hjólið sem merkt er með grænu er bremsað. Með því að hemla mun ökutækið fylgja grænu línunni í stað þess að verða stjórnlaus. Ýmsum nauðsynlegum ESP íhlutum er lýst neðst á þessari síðu.
Önnur nöfn fyrir ESP:
Bílaframleiðendur nota gjarnan eigin nöfn fyrir ESP fyrir gerðir sínar, þó að aðgerðin sé sú sama. Þessi önnur nöfn eru gefin til að láta kerfið líta út fyrir að vera „lúxusmeira“ en venjulegur ESP. Dæmi um þetta eru:
- ASC + T: Sjálfvirk stöðugleika- og gripstýring (gamla kynslóð BMW frá því fyrir 1996)
- DSC: Dynamic Stability Program: BMW, Jaguar, Land Rover, Mazda, Mini
- DSTC: Dynamic Stability and Traction Control (Volvo)
- ESP: Rafræn stöðugleikakerfi (Alfa Romeo, Audi, Cadillac, Chevrolet, Chrysler, Citroen, Fiat, Ford, Hyundai, Jeep, Kia, Mercedes, Mitsubishi, Nissan, Opel, Peugeot, Renault, Saab, Seat, Skoda, Smart, Suzuki , Volkswagen
- PSM: Porsche Stability Management (Porsche)
- VDC: Vehicle Dynamic Control (Alfa Romeo)
- VDCS: Dynamic Control System (Subaru)
- VSC: Stöðugleikastýring ökutækja (Lexus, Toyota)
- VSA: Stöðugleikaaðstoð ökutækja (Honda)
Undirstýring:
Undirstýring á sér stað þegar framdekkin hafa ekki lengur nægilegt grip á vegyfirborðinu. Bíllinn mun beygja slakari en ætlað var og því mun hann hafa meiri tilhneigingu til að fara beint. Framhjólin munu því renna utan á beygjuna. Hægt er að útrýma undirstýri til að tryggja að framhjólin nái aftur nægilegu gripi á vegyfirborðið. Til að ná þessu er hægt að nota minna bensín eða stýra minna. Jafnvel meira stýri hjálpar ekki gegn undirstýringu, það getur jafnvel gert það verra því hjólin munu aðeins hafa minna grip. Flestir bílaframleiðendur stilla undirvagninn þannig að bíllinn hefur tilhneigingu til að undirstýra frekar en ofstýra. Ástæðan er sú að hinn almenni ökumaður losar strax bensínið í slíkum aðstæðum (sem getur verið lausnin sem gefur bílnum aftur grip).
Í uppnámi:
Ofstýring á sér stað þegar afturdekkin grípa ekki lengur vegyfirborðið. Afturdekk bílsins munu renna út í beygjuna að utan. Aftan vill þá taka fram úr framan, sem veldur því að ökutækið snýst um ásinn. Yfirstýringu er hægt að leiðrétta með mótstýringu og hægja á afturhjóladrifnum bílum (t.d. BMW) og aðeins meira bensíni fyrir framhjóladrifna bíla (t.d. Volkswagen). Oft, sérstaklega í akstursíþróttum, er meðvitað notað yfirstýringu til að keyra í gegnum beygjusamsetningu auðveldara og hraðar. Í öfgafullu tilviki er þetta form af uppnámi kallað „rek“. Yfirstýring er almennt hættulegri en undirstýring, því flestir ökumenn eru ólíklegri til að geta leiðrétt það. Þess vegna er undirvagninn stilltur meira í átt að „undirstýri“ við hönnun bílsins því það er auðveldara að leiðrétta það.
Stýrishornskynjari:
Stýrishornskynjarinn er festur á stýrissúluna. Þetta getur verið nálægt stýrisgrindinni, en einnig í innra rýminu á milli stefnuljósa/þurrkustanganna, eins og sést á myndinni til hægri. Þetta eru stýrisrofar úr BMW.
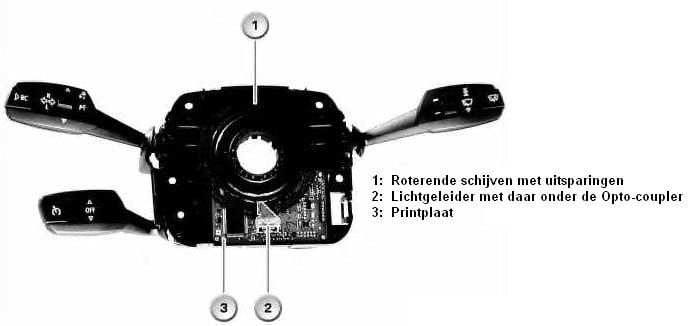
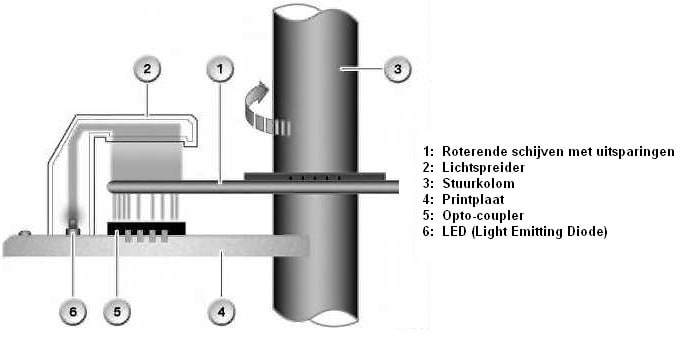
Verkefni stýrishornskynjarans er að mæla snúningshorn stýrisins. Þessi skynjari notar einn eða fleiri opto-tengla sem mæla ljósgeislun snúningsdiskanna. Ljósabilin eru mismunandi á hverjum stað á snúningsdiski, sem gerir kleift að greina nákvæma stöðu stýrisins. Allar innistæðurnar í skífunum búa til ósamhverft ferningamerki. Opto-tengillinn getur umbreytt ljósmerki í spennu sem síðan er sendur áfram í stjórneininguna.
Þverhröðunarskynjari (G-skynjari):
Hliðarhröðunarskynjarinn (einnig kallaður G-skynjari G-kraftanna) er settur eins mikið og hægt er í miðju bílsins. Í beygjum færist hreyfanlega platan (sjá mynd hér að neðan, númer 2) á milli þétta (1). Þétarnir eru með 5 volta spennu. Þegar platan er í miðjunni (þ.e. þegar bíllinn keyrir beint) er spennan á báðum þéttum 2,5 volt. Þegar bíllinn tekur beygju (í tilfelli myndarinnar til vinstri) færist platan til hliðar vegna miðflóttakraftsins og miðflóttakraftsins.
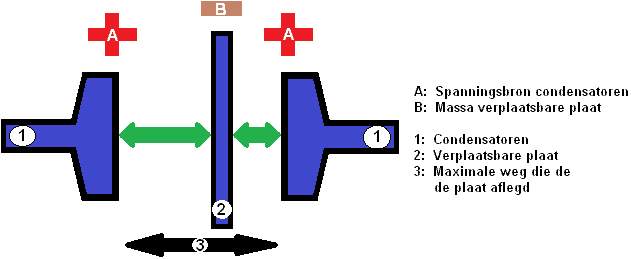
Þegar platan færist lækkar rýmd hægri þéttans. Þetta verður nú ekki 2,5 Volt heldur td 1,5V. ESP stjórneiningin greinir muninn á þéttunum tveimur og getur út frá því ákvarðað hversu mikill miðflóttakrafturinn eða miðflóttakrafturinn er (þ.e. hversu kröpp beygjan er gerð. Þannig má t.d. ákvarða hvort bíllinn sé að ofstýra) . Gildi þessa hliðarhröðunarskynjara eru notuð til að bera saman gögn frá hjólhraðaskynjara og ákvarða hvort ESP kerfið eigi að grípa inn í.
Yaw augnabliks skynjari (Yaw skynjari):
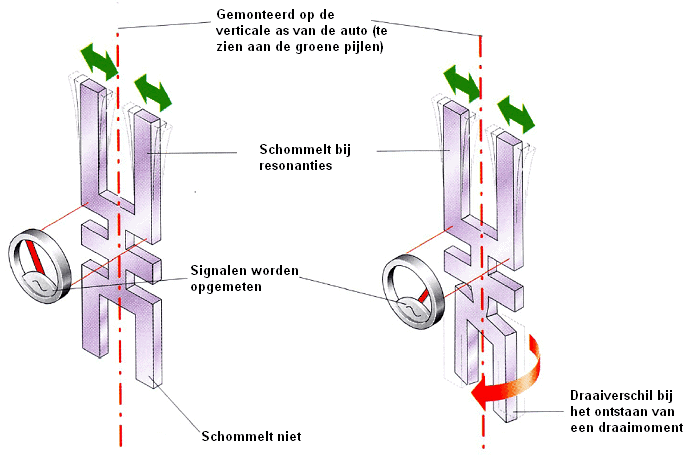
Yaw moment skynjari, einnig kallaður „Yaw sensor“ á ensku, er komið fyrir eins mikið og hægt er í miðju bílsins ásamt hliðarhröðunarskynjara. Skynjarinn gefur gögn sem ESP kerfið þarfnast. Geir augnabliksskynjarinn skráir tilhneigingu ökutækisins til að snúast um lóðrétta ásinn. Gildi þessarar mælingar er kallað snúningshraði og er sýnt í gráðum á sekúndu.
Skynjarinn samanstendur af tveimur stilli gafflum. Efri stilli gaffallinn er gerður til að titra (ómun) við 11000 Hz (11kHz) með riðspennu og snýst þegar ökutækið ekur í gegnum beygju. Því skarpari sem beygjan er, því meira er neðri stilli gaffallinn snúinn miðað við efri gafflinn. Meginreglan er byggð á gyroscopic krafti (Coriolis kraft). Þegar snúningshlutinn er færður úr stöðu með snúningi myndast sveiflukraftar. Þess vegna er nafnið yaw moment sensor.
Vegna torsionsins myndar piezo frumefni spennumun sem er mældur af stjórnbúnaðinum. Spennan sem myndast er á bilinu 0 til 5 volt. Í hvíldarstöðu (þegar enginn snúningur er skráður) gefur skynjarinn frá sér 2,5 volt.
Bremsuþrýstingsskynjari:
Aðskildum vökvaþrýstingsskynjurum hefur einnig verið bætt við hemlakerfið (í báðum hringrásum), sem sjá má á myndunum hér að neðan. Í eldri bílum eru þessir skynjarar staðsettir í bremsuleiðslum. Nú á dögum eru bremsuþrýstingsnemar venjulega innbyggðir í vökvaeiningu ABS-kerfisins sjálfs. Þessi eining er oft sýnileg undir hettunni. Allar vökvahemlalögn eru tengdar þessu.

