topik:
- Kesalahan pengemudi
Kesalahan kontrol:
Prinsip Ackermann memastikan bahwa ketika berbelok ke dalam, satu roda berputar lebih jauh dari roda lainnya. Untuk informasi lebih lanjut tentang ini, lihat halaman Prinsip Ackermann en jari kaki keluar di tikungan.
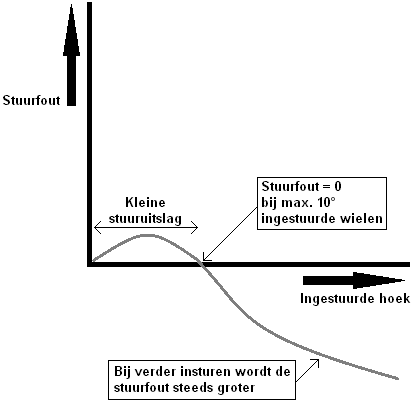
Jika membaca halaman yang disebutkan, akan terlihat jelas bahwa roda depan kiri dan roda depan kanan sama-sama memiliki sudut kemudi yang berbeda. Jadi kesalahan kemudi hampir selalu terjadi. Kesalahan kemudi berarti kedua sudut yang dimasukkan tidak sama dan oleh karena itu salah satu roda mengalami slip lebih banyak dibandingkan yang lain. Hanya ada satu situasi di mana tidak terjadi kesalahan kemudi. Ini terjadi saat berbelok dengan sudut kemudi kecil, hingga kurang lebih 10 derajat (lihat gambar).
Sumbu X pada gambar menunjukkan sudut kemudi dan sumbu Y menunjukkan kesalahan kemudi. Di pojok kiri (jadi pada X = 0) Anda berkendara lurus ke depan. Garis di bawah “Sudut kemudi kecil” berjalan positif di sepanjang sumbu X. Garis ini menunjukkan bahwa kesalahan kemudi dengan sudut kemudi maksimum 10 derajat adalah 0. Jadi dengan sudut kemudi maksimal 10 derajat tidak terjadi kesalahan kemudi. Dengan demikian tidak akan terjadi selip pada roda depan. Sengaja dibuat sedemikian rupa, karena saat berkendara dengan kecepatan tinggi (misalnya di jalan raya) sudut kemudi seringkali berkisar 10 derajat. Pada kecepatan tinggi, roda depan tidak mengalami slip dengan sudut kemudi maksimal 10 derajat, sehingga cengkeramannya maksimal. Dengan kemudi lebih lanjut, kesalahan kemudi menjadi jauh lebih besar. Pada prinsipnya hal itu tidak menjadi masalah, karena biasanya terjadi di dalam kota, dengan kecepatan rendah. Pada kecepatan yang lebih rendah, kesalahan kemudi memiliki pengaruh yang lebih kecil dibandingkan pada kecepatan yang lebih tinggi.