Subyek:
- Inleiding
- Sinyal dari penyelesai
- Komponen penyelesai
Perkenalan:
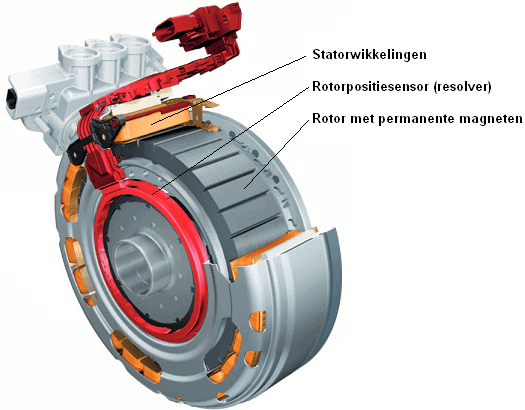
Untuk pengoperasian motor listrik sinkron sangat penting bahwa pembilasan yang benar melalui membalikkan dikendalikan. Untuk menentukan kumparan mana (U, V atau W) yang harus diberi energi, ECU inverter membaca posisi rotor, yang diukur oleh sensor posisi rotor, disebut juga “resolver”.
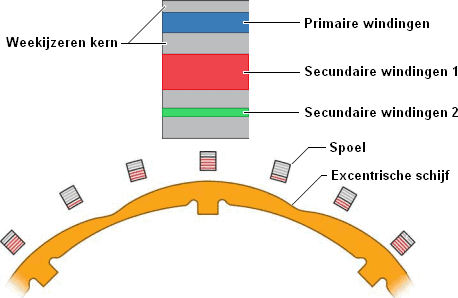
Resolver terdiri dari cincin luar dengan sejumlah kumparan di bagian dalam pelat eksentrik yang berputar. Jarak antara pelat eksentrik dan kumparan terus berubah seiring rotasinya.
Sinyal dari penyelesai:
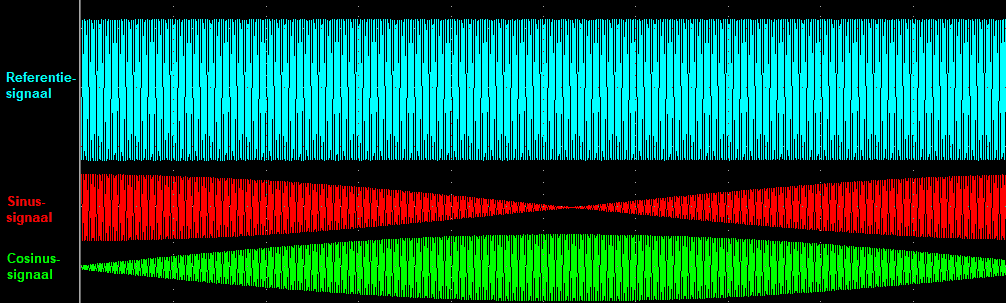
ECU memberikan sinyal referensi kepada solver. Celah udara antara kumparan dan eksentrik menciptakan tegangan bolak-balik sinusoidal yang tinggi atau rendah. Dengan amplitudo tinggi pada sinyal sinusoidal merah atau hijau (lihat gambar di bawah), celah udara antara eksentrik dan kumparan menjadi kecil.
Resolver berfungsi baik saat berhenti maupun saat motor listrik berjalan: dalam kedua kasus tersebut ECU harus mengetahui di mana posisi rotor berada.
Gambar di bawah menunjukkan sinyal teoretis. Kenyataannya, frekuensinya jauh lebih tinggi, sehingga variasi amplitudo sinyal sinus dan kosinus terlihat jelas.
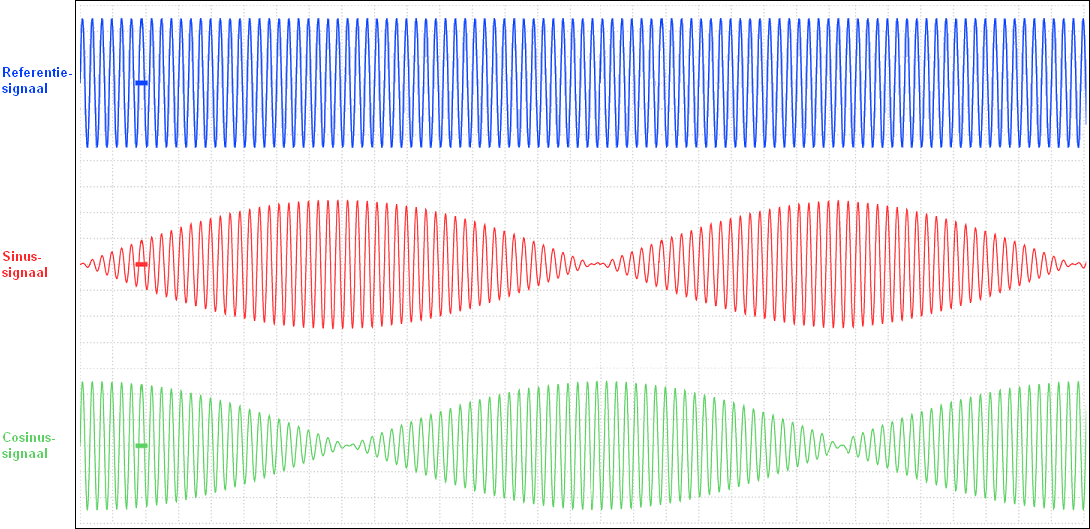
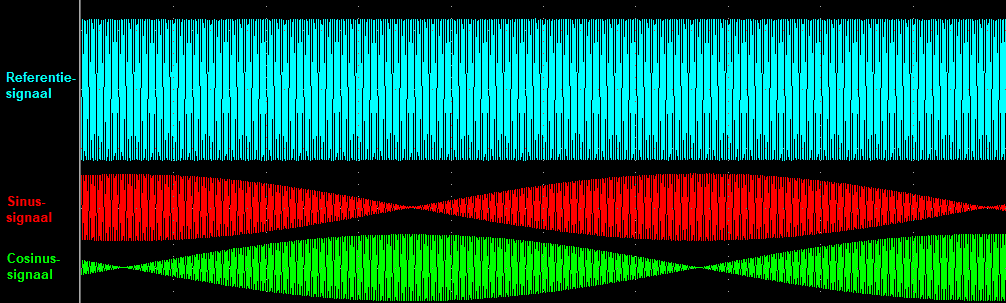
Dua gambar di bawah menunjukkan pengukuran aktual pada resolusi. Di sini juga kita melihat sinyal referensi di atas, dan sinyal sinus dan kosinus di bawah. Gambar pertama terhenti: motor listrik tidak hidup. Ketinggian sinyal sinus dan sinyal cosinus tetap konstan. Berdasarkan level tegangan bolak-balik ini, ECU mengetahui posisi rotor saat stasioner.
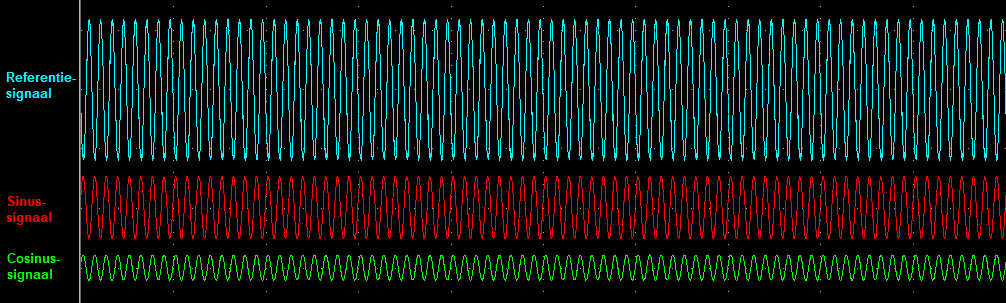
Dalam dua gambar berikutnya waktu per divisi telah dikurangi. Frekuensi sinyal referensi pada resolusi tidak berubah, tetapi diukur dalam periode waktu yang lebih lama dalam pengukuran. Hasilnya, kita melihat amplitudo sinyal sinus dan kosinus berubah dengan jelas. Gambar pertama diukur pada kecepatan rotor rendah dan gambar kedua pada kecepatan meningkat. Ketika kecepatan meningkat, frekuensi sinyal sinus dan kosinus meningkat (lebih banyak sinyal per satuan waktu), tetapi amplitudo (tingkat tegangan bolak-balik) tetap konstan.
Komponen penyelesai:
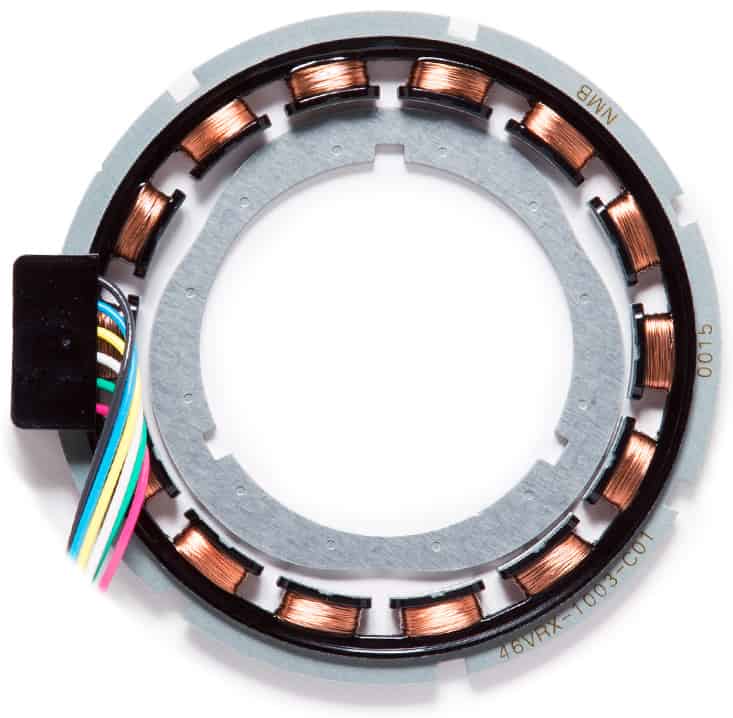
Resolver VW E-Golf berisi 30 kumparan yang dihubungkan secara seri. Setiap kumparan pada solver terdiri dari inti besi lunak dengan tiga belitan berbeda: primer, sekunder 1, dan sekunder 2.
Kumparan primer (biru) disuplai dengan tegangan bolak-balik frekuensi tinggi.
Jumlah lilitan sekunder (1 merah, 2 hijau) berbeda-beda pada setiap kumparan.
Ketika bubungan pelat eksentrik bergerak sepanjang kumparan, induktansi pada belitan sekunder diperkuat. Karena banyaknya lilitan lilitan sekunder 1 dan 2 pada masing-masing kumparan, hal ini juga mengakibatkan perbedaan tegangan pada lilitan sekunder tersebut. ECU pada inverter dapat menghitung posisi rotor berdasarkan tegangan belitan sekunder 1 dan 2.
Penyetelan penyelesai pada rotor sangat tepat: banyak pabrikan yang menyarankan agar seluruh motor listrik harus diganti jika terjadi masalah pada penyelesai. Setelah (tidak sengaja) membongkar solver, atau mengendurkan baut-baut bagian luar rumah motor listrik, maka solver tidak dapat lagi dipasang kembali dengan benar. Dalam hal ini pun, banyak pabrikan yang menyarankan penggantian motor listrik.
Posisi rotor yang tepat dari a motor sinkron harus diketahui saat berhenti dan saat mengemudi. Jika sensornya rusak, kendaraan tidak bisa melaju lagi.
Dari motor asinkron di sisi lain, tidak diperlukan pemantauan posisi rotor. Sensor posisi rotor memancarkan empat pulsa per putaran rotor. Pengukuran ini memonitor jumlah maksimum slip antara medan magnet berputar antara stator dan rotor. Sensor Hall sering digunakan sebagai sensor. Sensor Hall mengirimkan pulsa ke ECU ketika rotor berputar, tetapi tidak dapat melakukan pengukuran saat berhenti, tidak seperti pemecah masalah pada motor sinkron. Pabrikan juga terkadang memilih untuk menggunakan resolusi motor sinkron sebagai sensor posisi rotor.
Halaman terkait: