Subyek:
- Bantuan parkir umum
- Kontrol jarak taman
- Kamera mundur
- Tampilan samping
- Pemandangan sekitar
- Bantuan parkir
Bantuan parkir umum:
Bantuan parkir mencakup sistem yang membantu pengemudi masuk dan keluar dari tempat parkir. Sistem bantuan parkir yang paling terkenal adalah “park distance control”, disingkat PDC. Sistem ini menginformasikan kepada pengemudi kendaraan mengenai jarak ke mobil di belakang, atau dengan sistem luas juga ke depan kendaraan. Halaman ini menjelaskan teknologi modern yang merupakan perpanjangan dari kendali jarak taman atau sistem bantuan yang sepenuhnya mandiri.
Kontrol jarak taman:
Park Distance Control (PDC) adalah sistem peringatan jarak yang mengukur sinyal saat memasuki dan keluar tempat parkir dan memberikan informasi tentang jarak ke penghalang. Sensor ultrasonik terdapat di bemper belakang dan seringkali juga di bemper depan (lihat gambar). Ini memancarkan gelombang suara dengan frekuensi sangat tinggi yang tidak terlihat oleh telinga manusia. Frekuensi ultrasonik ini memantulkan objek di dekatnya dan diterima oleh sensor. Sensor mengukur waktu antara mengirim dan menerima sinyal-sinyal ini. Semakin dekat objek, semakin cepat sinyal memantul kembali. Sensor menangkapnya dan meneruskannya ke unit kontrol PDC (komputer).
Komputer ini dapat mengirimkannya ke pengemudi dalam sinyal audio dan dengan sinyal gambar dan suara. Bunyi bip kemudian terdengar, yang semakin cepat seiring mendekatnya objek. Pada jarak kurang lebih 30 cm mengeluarkan bunyi bip terus menerus yang memberitahukan Anda sebagai pengemudi bahwa Anda harus berhenti.

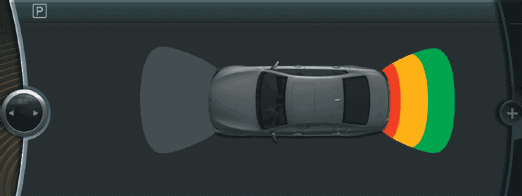
Komputer terpasang modern sering kali dilengkapi dengan opsi di mana jarak ke objek ditampilkan di layar. Sensor PDCnya sama; unit kontrol menghitung data dari sensor dan memprosesnya menjadi informasi yang dapat ditampilkan di layar.
Gambar di bawah menunjukkan unit kontrol PDC (ECU). Kotak abu-abu ini berisi mikrokontroler, amplifier, dan gerbang AND. Mikrokontroler mentransmisikan tegangan gelombang persegi dengan frekuensi kurang lebih 40 kHz (hitam). Tegangan blok dengan frekuensi rendah juga dikeluarkan secara berkala (merah/biru). Gerbang AND menerima tegangan dua blok. Ketika kedua tegangan tinggi, tegangan keluaran (di sebelah kanan gerbang AND) tinggi. Ketika salah satu dari dua tegangan rendah, keluarannya juga menjadi rendah. Tegangan keluaran dikirim kembali ke mikrokontroler dan ke pemancar di sensor PDC. Pemancar memancarkan sinyal ultrasonik dengan kecepatan sekitar 300 m/s. Ketika suatu benda berada di dekatnya, suara ultrasonik dipantulkan dan didaftarkan oleh penerima. Kami menyebutnya “triangulasi”. Penerima mengirimkan sinyal blok yang terbentuk ke ECU. Sinyal blok diperkuat menggunakan amplifier dan kemudian diproses oleh mikrokontroler.
Waktu antara penerimaan sinyal keluaran dari gerbang AND dan penguat adalah ukuran jarak ke objek. Semakin kecil jarak antara sensor PDC dengan objek maka waktu yang dibutuhkan semakin singkat. Mikrokontroler mengontrol buzzer atau berkomunikasi dengan unit kontrol lain melalui bus CAN.
Diagram sirkuit (VAG) di bawah ini menunjukkan komunikasi antara unit kontrol, input ke sakelar, dan output, antara lain, ke buzzer.
Unit kontrol PDC (J446) menerima kecepatan mengemudi dan sinyal mundur melalui bus CAN. Unit kontrol PDC mengirimkan tegangan blok termodulasi melalui koneksi T12/11 ke sambungan kabel (X86 di bumper belakang) yang terhubung ke semua sensor PDC (G203, G334, G335 dan G206). Setiap sensor PDC memiliki kabel sinyalnya sendiri (melalui pin 2) ke ECU. Selanjutnya, ground dari masing-masing sensor dihubungkan ke ground wes (352).
Ketika satu atau lebih sensor mendeteksi suatu objek, unit kontrol mengaktifkan buzzer (H15). Tergantung pada jarak ke objek, bel mengeluarkan sinyal suara terputus-putus yang lebih cepat atau lebih lambat.

Berkat komunikasi dengan antarmuka diagnostik (J533), fungsi diagnostik berikut dapat dilakukan:
- memori kesalahan kueri
- Sesuaikan pengkodean unit kontrol (misalnya setelah memperluas sistem dengan sensor PDC di depan atau setelah memasang batang penarik)
- sesuaikan volume bel
- Menginterogasi blok nilai terukur, antara lain, jarak dari semua sensor ke objek, jarak yang dihitung, dan waktu stabilisasi pemancar dan penerima.
Kamera mundur:
Selain pengatur jarak parkir, alat bantu parkir tersebut juga bisa dilengkapi dengan kamera mundur. Saat pengemudi memasukkan gigi mundur atau menekan tombol di interior, kamera di bagian belakang kendaraan diaktifkan. Biasanya layar radio atau komputer terpasang menampilkan gambar.
Gambar di bawah menunjukkan tampilan BMW dengan gambar di bagian belakang kendaraan. Di sebelah kanan gambar kamera terdapat kendaraan dengan kisi tiga bagian di depan dan belakang; Ini menunjukkan jarak ke objek yang didaftarkan oleh sensor PDC.
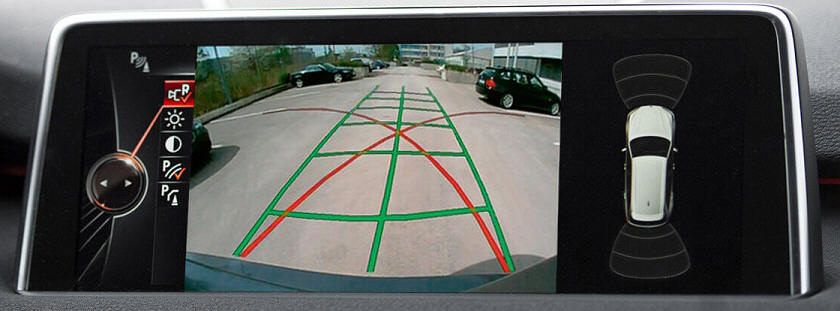
Garis merah dan hijau terlihat pada gambar kamera mundur. Garis merah menunjukkan kemungkinan arah kemudi kendaraan; Pada kemudi maksimal, roda akan mengikuti garis merah di bagian luar tikungan. Kotak hijau mengikuti arah putaran setang; saat ini roda depan lurus ke depan. Saat pengemudi memutar kemudi, garis hijau menunjukkan garis mengemudi sebenarnya. Sensor sudut kemudi mencatat posisi roda kemudi.
Kamera mundur terkadang terlihat jelas dan sering kali terletak di dekat pelat nomor dan/atau pegangan untuk membuka pintu belakang. Terkadang pabrikan memilih untuk memasang kamera di tempat yang tidak terlihat. Gambar di bawah menunjukkan kamera belakang VW Golf, dimana motor listrik memiringkan lambang VW untuk menggerakkan kamera ke arah luar. Emblem otomatis terlipat ke belakang saat Anda melaju ke depan lagi. Tidak hanya kamera ditempatkan di tempat yang tidak terlihat, lensa juga tidak cepat kotor.

Tampilan samping:
Saat Anda terbalik di antara dua kendaraan atau benda besar, Anda harus berkendara sedikit ke depan untuk melihat ke kiri dan ke kanan. Ini jauh lebih mudah dengan kamera tampak samping (juga disebut tampilan sudut); kamera di kiri dan kanan di bemper depan mengirimkan gambar ke layar di dashboard. Gambar menunjukkan gambar dari kamera sudut. Sayangnya, kamera tidak bisa dipasang tanpa terlihat. Mobil yang dilengkapi kamera tampak samping (seringkali) memiliki lensa hitam di bempernya. Gambar di bawah menunjukkan bumper depan BMW dengan kamera kiri.


Pemandangan sekeliling:
Sistem bantuan parkir paling mewah tidak diragukan lagi mencakup “tampilan sekeliling”, juga dikenal sebagai tampilan atas, 3D, atau tampilan burung. Setiap merek memberikan nama dan karakteristik tersendiri pada sistemnya. Kami sekarang menggunakan nama tampilan surround.
Dengan tampilan sekeliling, bagian atas mobil ditampilkan di layar. Sepertinya ada kamera yang melihat ke arah atap mobil dan area di sekitarnya. Mobil merupakan simulasi dan lingkungannya direkam oleh beberapa (biasanya empat) kamera yang tersusun.
Tiga gambar berikut (dari BMW) menunjukkan gambar yang dilihat pengemudi. Saat parkir, pemisahan tempat parkir dan benda-benda seperti tiang, dll terlihat jelas. Saat mundur, Anda dapat memperbesar bagian belakang; Di sini Anda terutama dapat melihat tanaman. Sensor PDC konvensional mencatat jarak ke pembangkit. Komputer menandai jarak ini dengan warna merah.

Saat parkir depan, sistem juga dapat menampilkan keadaan sekitar dan bagian depan. Sensor PDC kini juga membantu menentukan jarak ke pagar.

Parkir paralel di sepanjang tepi jalan, jika pengemudi tidak berhati-hati, dapat menyebabkan kerusakan pada ban dan pelek. Tampilan sekeliling juga menawarkan solusi sekarang; Berkat gambaran pemandangan jalanan yang bagus, Anda dapat parkir lurus dan dekat dengan tepi jalan. Perkembangan terbaru dari BMW memungkinkan untuk membalikkan gambar kamera dan mensimulasikan kendaraan.

Tiga gambar berikutnya menunjukkan tempat-tempat di mana kamera sering berada.



Bantuan parkir:
Sebagai perpanjangan dari bantuan parkir, apa yang disebut “bantuan di luar parkir” dapat membantu pengemudi ketika meninggalkan tempat parkir ke belakang dengan jarak pandang terbatas. Hal ini dapat terjadi ketika kendaraan diparkir di samping tembok atau di antara kendaraan.
Sensor di bagian belakang mobil mendeteksi lalu lintas yang lewat di belakang kendaraan dan kemungkinan menimbulkan risiko tabrakan. Termasuk semua benda bergerak yang mendekati kendaraan dengan kecepatan tertentu. Ketika sistem bantuan parkir mendeteksi kendaraan mendekat, sebuah pesan muncul di tampilan sistem infotainmen. Sinyal suara akustik biasanya ditambahkan ke dalamnya. Jika pengemudi mengabaikan sinyal-sinyal ini dan mengemudi mundur, sistem akan melakukan intervensi secara fisik dengan mengoperasikan rem untuk memperlambat kendaraan.
