Subyek:
- Inleiding
- Diagnosis sinyal bus CAN kecepatan rendah/sedang
- Diagnosis sinyal bus CAN berkecepatan tinggi
- Diagnosis dengan multimeter
Perkenalan:
Jika diduga ada kerusakan pada bus CAN, diagnosis dapat dilakukan antara lain dengan mengukur level tegangan pada kabel.
Isi pesan bus CAN pada awalnya tidak penting. Kita dapat melakukan pengukuran pada kabel bus CAN dengan multimeter dan osiloskop. Pengukuran dengan multimeter memang mempunyai keterbatasan; saat mengukur tegangan, hanya nilai rata-rata yang ditunjukkan. Multimeter cukup memadai ketika mengukur gangguan atau korsleting. Osiloskop diperlukan untuk mengukur level tegangan dan menilai apakah sinyal memiliki jalur yang bersih.
Cara kerja sistem bus CAN dan struktur pesan dijelaskan di halaman BISA bis. Halaman ini berfokus pada pengukuran bus CAN dengan osiloskop dan multimeter dan kemungkinan malfungsi serta penyebabnya dijelaskan.
Diagnosis sinyal bus CAN kecepatan rendah/sedang:
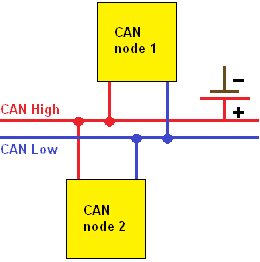
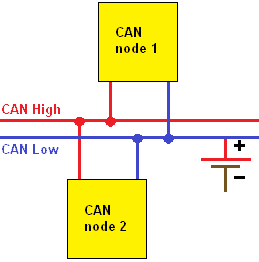
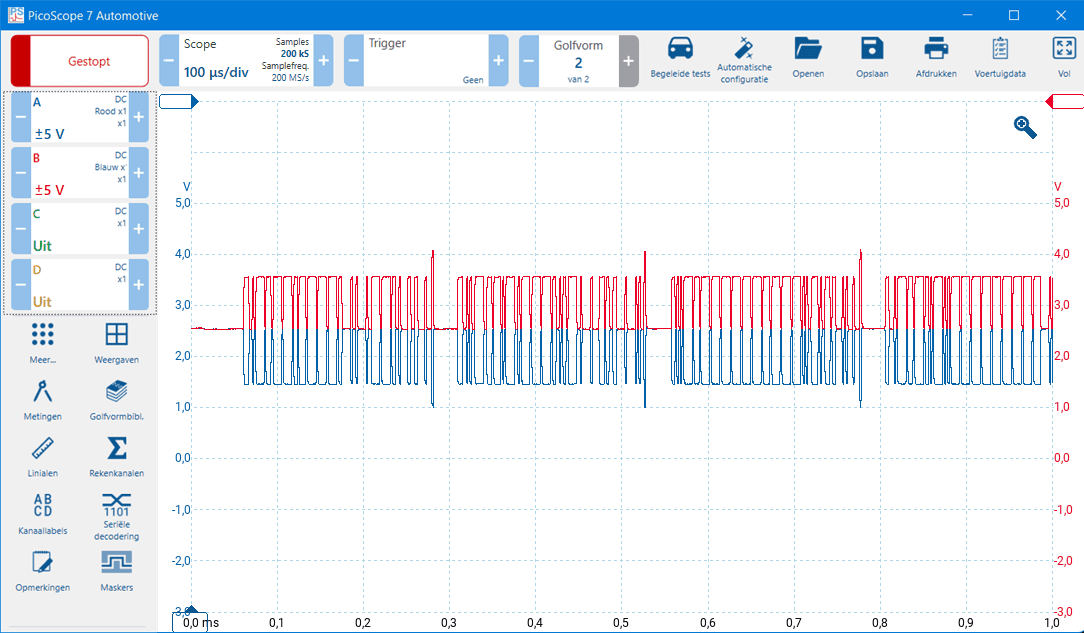
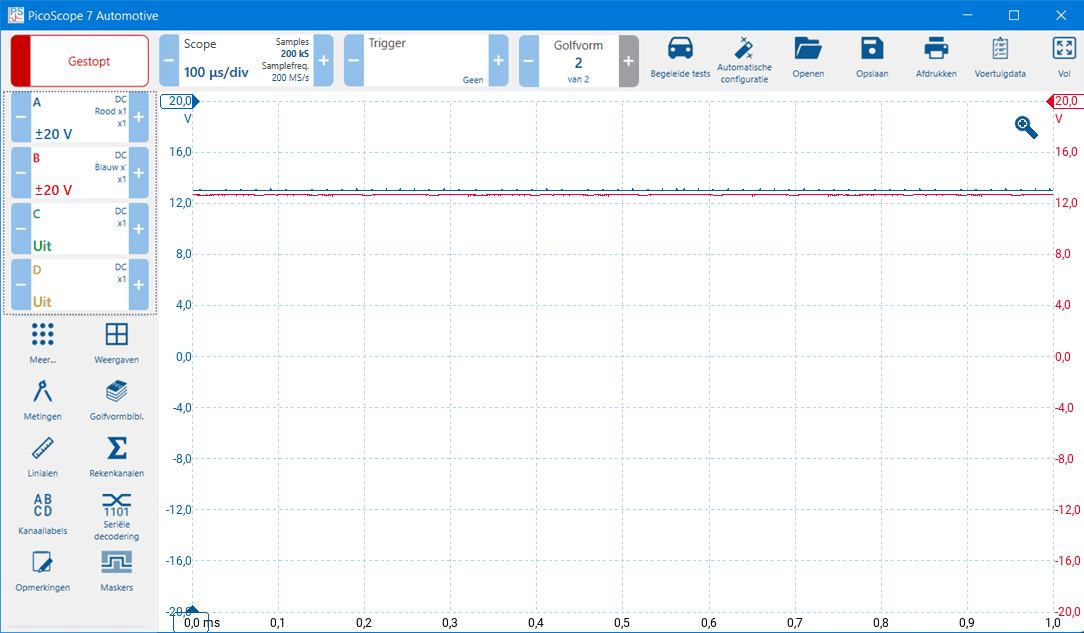
Dengan osiloskop dua saluran, CAN-high dan CAN-low dapat diukur secara bersamaan terhadap ground. Dua gambar lingkup di bawah ini menunjukkan sinyal bus CAN dari bus kenyamanan. Ini juga disebut “kecepatan rendah” atau “kecepatan sedang”. Jaringan ini sering kita jumpai pada perangkat elektronik kenyamanan, misalnya elektronik pintu, BCM, unit kendali AC, dan panel instrumen. Tegangannya adalah sebagai berikut:
- BISA-rendah: diam 0 volt, aktif 4 volt;
- CAN-high: idle 5 volt, aktif 1 volt.
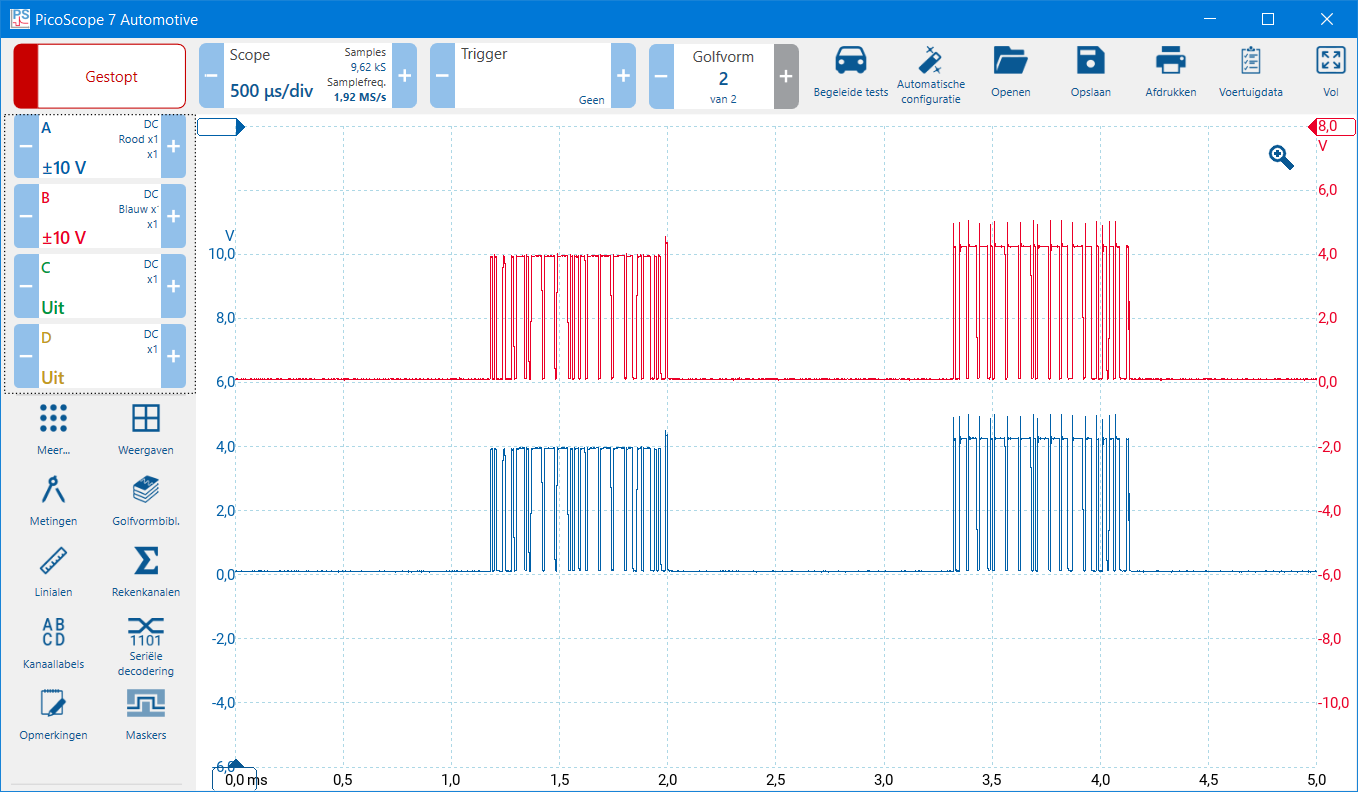
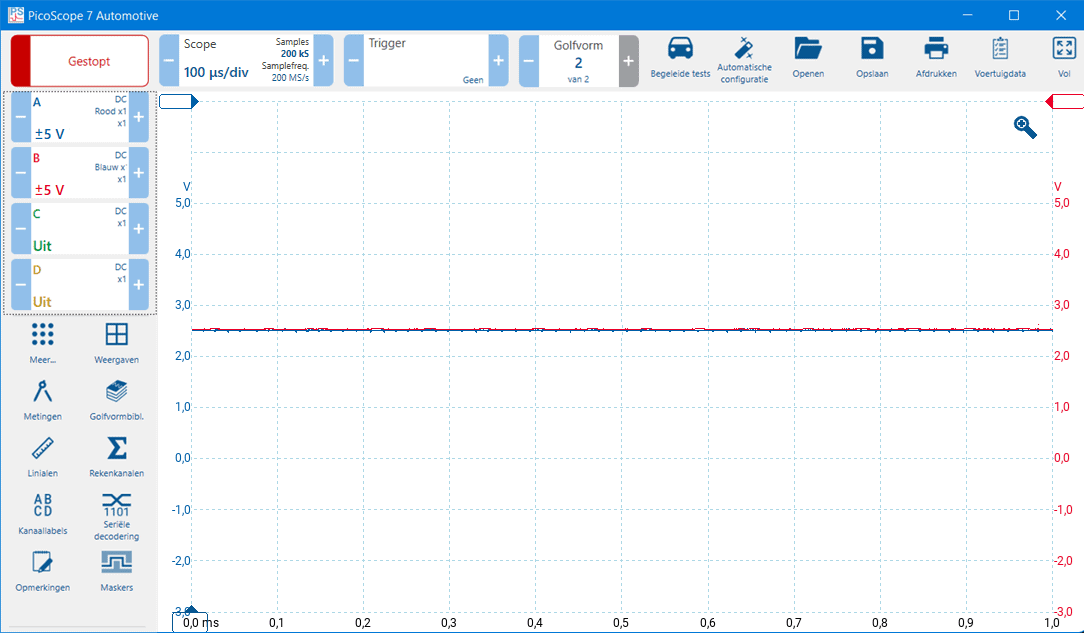
Saat kita mengatur garis nol dari kedua saluran pengukuran ke ketinggian sumbu Y yang sama, sinyalnya akan bergabung. Oleh karena itu disarankan untuk memindahkan sumbu Y dari CAN-rendah ke atas untuk membaca. Pada gambar kedua di bawah, garis nol telah berubah ketinggiannya, sehingga profil tegangan CAN tinggi dan rendah dapat dibandingkan dengan baik.
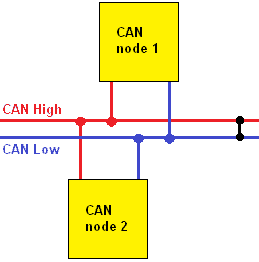
Harap diperhatikan: jaringan CAN berkecepatan rendah dan menengah seringkali tidak dilengkapi dengan resistor pemutus, tidak seperti jaringan CAN berkecepatan tinggi. Oleh karena itu, pengukuran yang dilakukan pada suatu kesalahan juga berbeda. Bagian ini menunjukkan kemungkinan gangguan pada jaringan berkecepatan rendah dan menengah, dan bagian berikutnya menunjukkan jaringan berkecepatan tinggi.


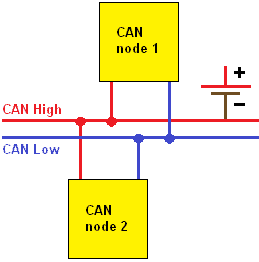
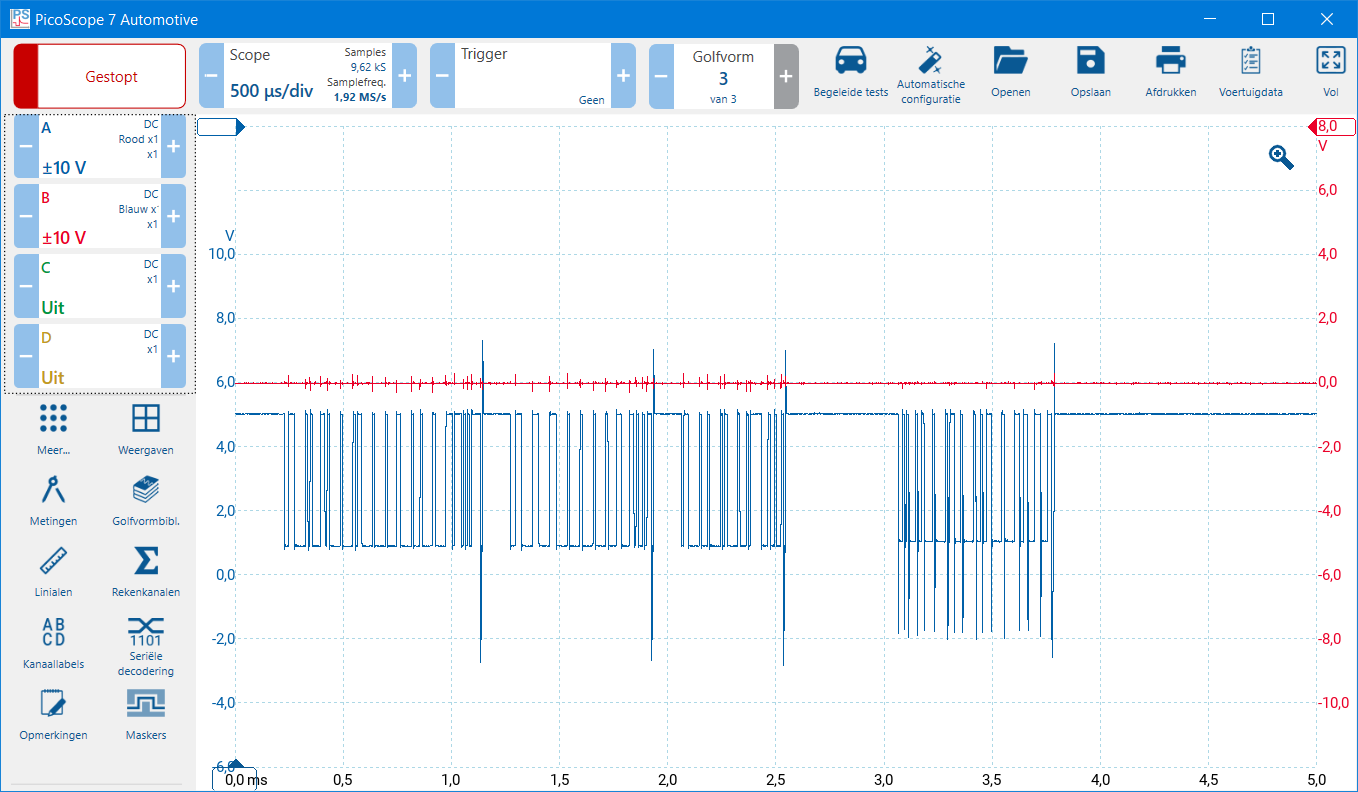
Korsleting setinggi CAN ke ground:
Di CAN tinggi ada ground short. Jika insulasi rusak, kabel dapat bersentuhan dengan bodi, atau di ECU terjadi korsleting ke ground.
Pada pengukuran di bawah ini kita melihat saluran tegangan konstan pada saluran B yaitu 0 volt.
CAN-rendah korsleting ke ground:
Ada kekurangan pada level terendah CAN. Jika insulasi rusak, kabel dapat bersentuhan dengan bodi, atau di ECU terjadi korsleting ke ground.
Pada pengukuran di bawah ini kita melihat saluran tegangan konstan pada saluran A yaitu 0 volt.
Korsleting setinggi CAN ke plus:
Pada titik tertinggi CAN terdapat penutupan positif. Jika isolasi beberapa kabel pada rangkaian kabel rusak, kabel dapat bersentuhan satu sama lain, atau di ECU terjadi korsleting dengan positif.
Dalam dua pengukuran di bawah ini kita melihat:
- Channel overrange: rentang tegangan saluran B (merah) perlu ditingkatkan;
- Pada saluran B kita melihat (dalam kisaran 20 V) saluran tegangan konstan yang sama dengan tegangan baterai.


CAN-rendah korsleting ke plus:
CAN-rendah memiliki sirkuit positif. Jika isolasi beberapa kabel pada rangkaian kabel rusak, kabel dapat bersentuhan satu sama lain, atau di ECU terjadi korsleting dengan positif.
Dalam dua pengukuran di bawah ini kita melihat:
- Channel overrange: rentang tegangan saluran A (biru) perlu ditingkatkan;
- Pada saluran A kita melihat (dalam kisaran 20 V) saluran tegangan konstan yang sama dengan tegangan baterai.


Korsleting CAN-tinggi dengan CAN-rendah:
CAN-rendah berubah menjadi profil tegangan CAN-tinggi ketika keduanya terhubung satu sama lain. Hubungan pendek antara CAN-high dan CAN-low dapat terjadi pada kabel, dimana isolasi kedua kabel bus CAN telah aus, atau karena cacat pada papan sirkuit cetak ECU.
Pada gambar di bawah kita melihat pengukuran dua saluran di mana CAN tinggi dan rendah dihubung pendek satu sama lain.
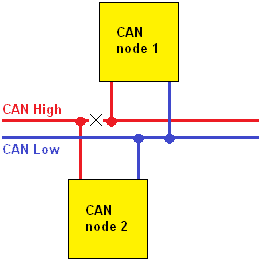
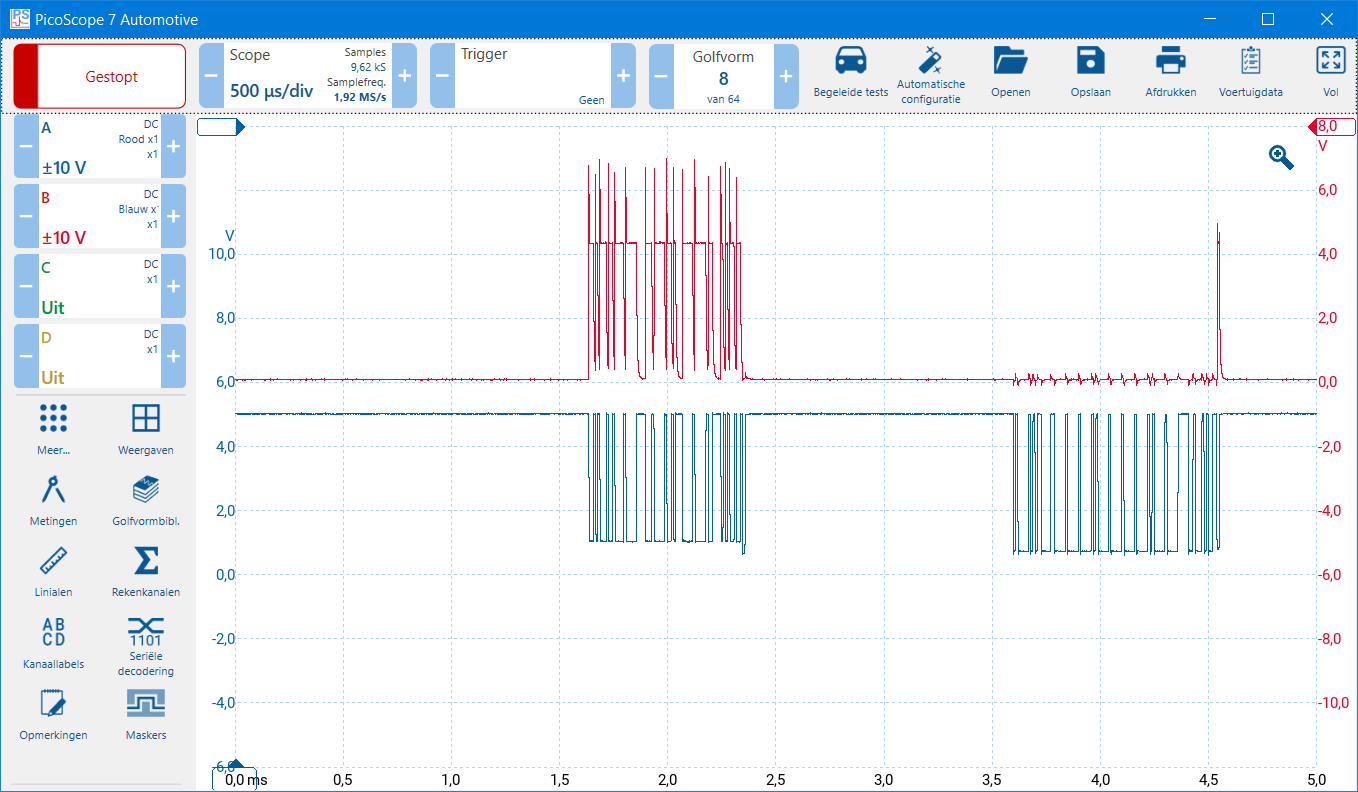
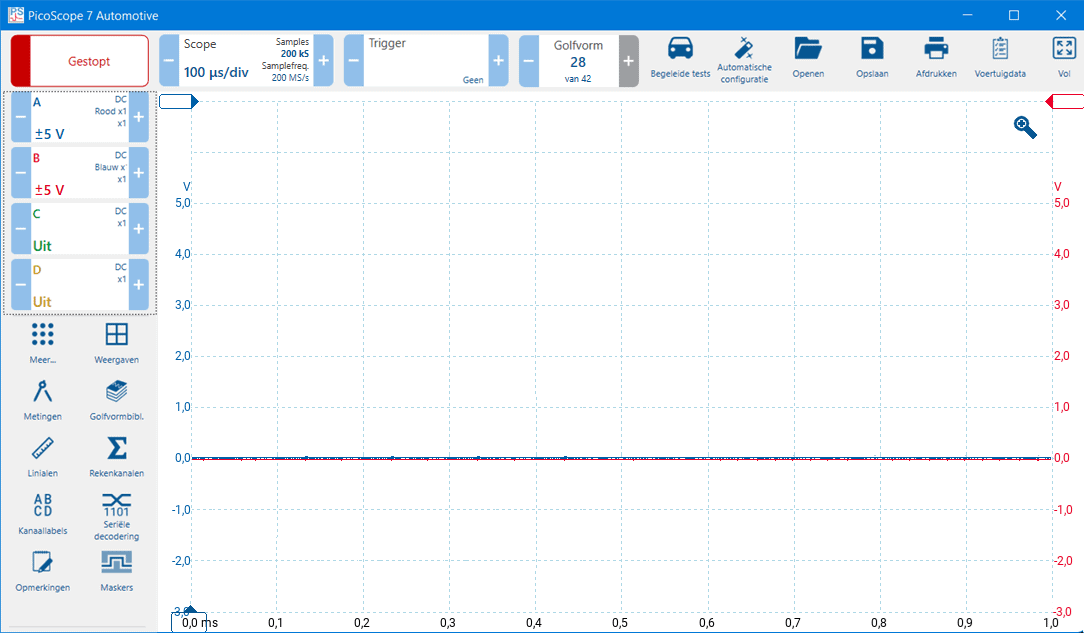
Pada komunikasi CAN-tinggi terkadang terputus:
Komunikasi dengan satu unit kontrol di CAN tinggi terputus. Unit kontrol ini tidak lagi mengirim dan menerima data melalui CAN-high, namun CAN-low tetap berfungsi. Artinya komunikasi dan membaca tetap dimungkinkan.
Ketika steker unit kontrol terkait dicabut, data CAN-rendah juga hilang dan perbedaan antara CAN-tinggi dan CAN-rendah tidak lagi terlihat.
Pada gambar di bawah kita melihat bahwa CAN-high tetap tersembunyi pada suatu titik, sementara data dikirim pada CAN-low.
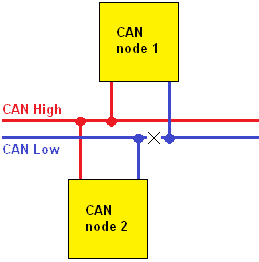
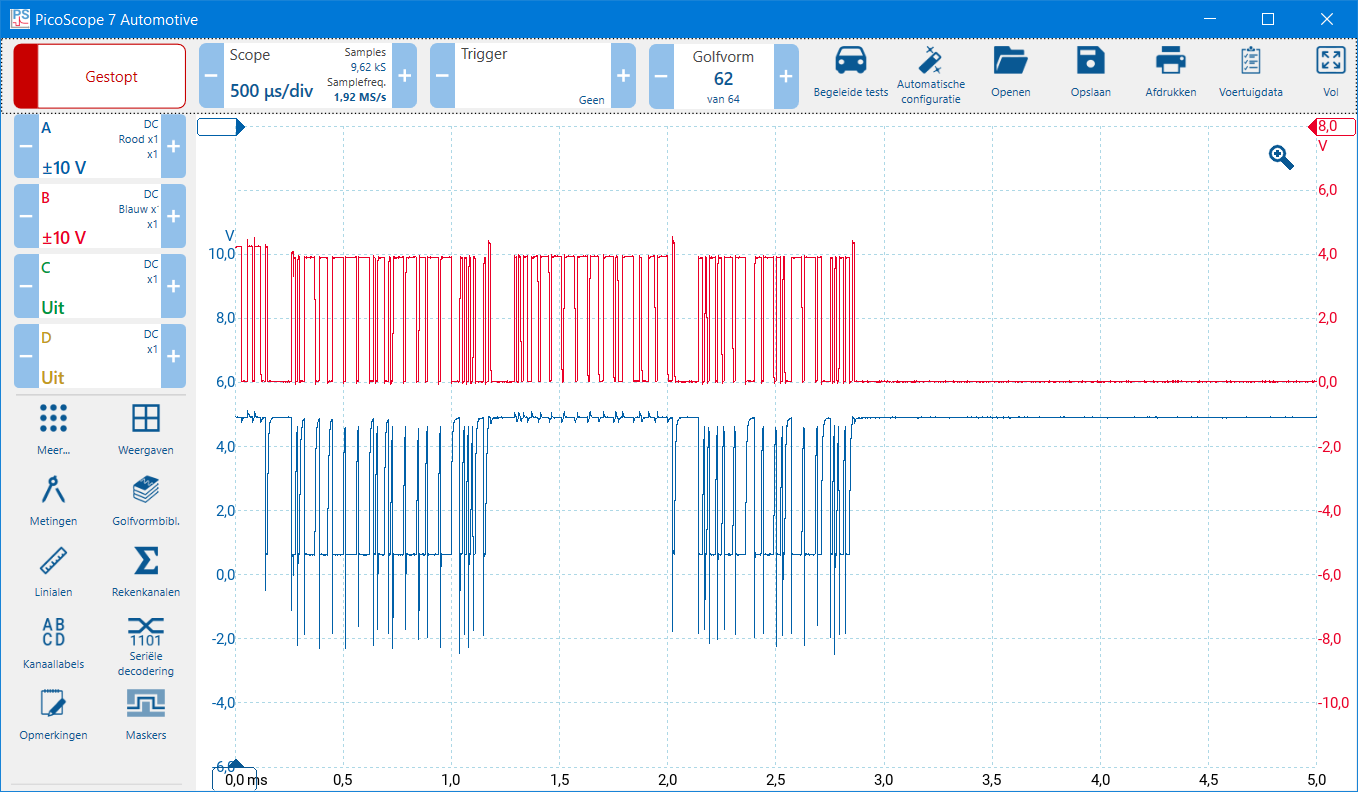
Pada komunikasi CAN-rendah terkadang terputus:
Komunikasi dengan satu unit kontrol di CAN-rendah terputus. Unit kontrol ini tidak lagi mengirim dan menerima data melalui CAN-low, namun CAN-high tetap berfungsi. Artinya komunikasi dan membaca tetap dimungkinkan.
Ketika steker unit kontrol terkait dicabut, data CAN-high juga hilang dan perbedaan antara CAN-high dan CAN-low tidak lagi terlihat.
Pada gambar di bawah kita melihat bahwa CAN-low tetap resesif pada suatu titik, sementara data dikirim pada CAN-high.
Diagnosis sinyal bus CAN kecepatan tinggi:
ECU yang sangat mementingkan kecepatan komunikasi tinggi dilengkapi dengan jaringan CAN berkecepatan tinggi. Ini termasuk, misalnya, ECU mesin pembakaran, transmisi otomatis, ABS/ESP/EBS, dan airbag. Jaringan berkecepatan tinggi selalu dilengkapi dengan resistor pemutus. Oleh karena itu, kesalahan pada kabel dan ECU juga menyebabkan profil voltase berbeda, yang terkadang membuatnya lebih sulit untuk didiagnosis dibandingkan dengan jaringan yang nyaman. Seperti biasa, situasi bebas masalah ditampilkan terlebih dahulu sebelum kita melanjutkan ke kegagalan.
Tegangan jaringan berkecepatan tinggi adalah sebagai berikut:
- CAN-high: idle 2,5 volt, aktif 3,5;
- CAN-low: idle 2,5 volt, aktif 1,5 volt.
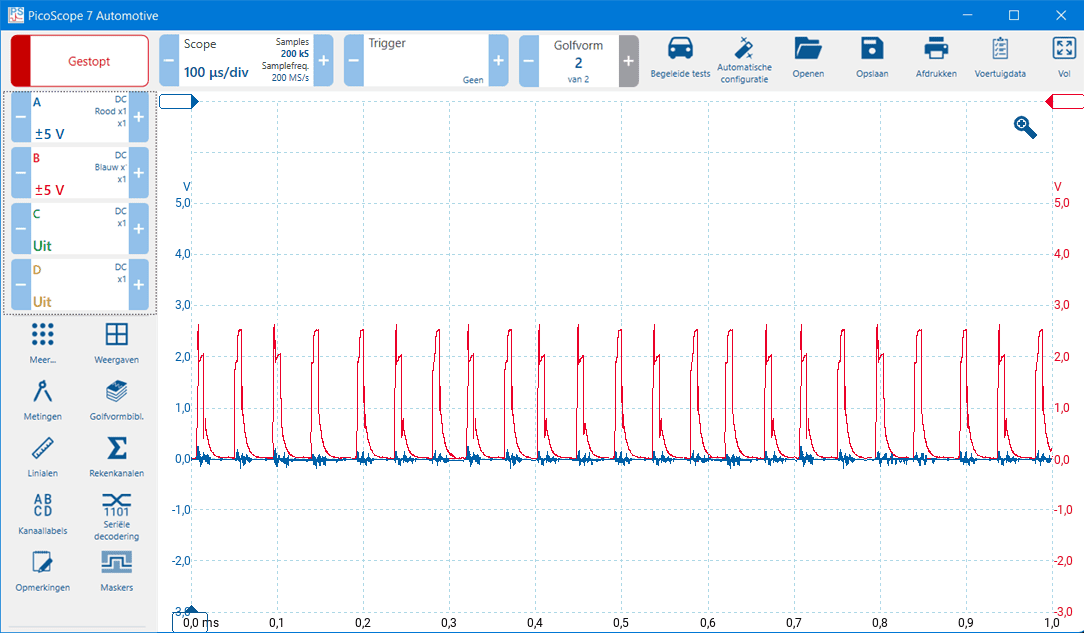
Ketika CAN tinggi dan rendah sama-sama 2,5 volt, bus bersifat resesif (diam). Ketika CAN tinggi naik dan CAN rendah turun, bus menjadi dominan dan terbentuk sedikit. Gambar di bawah menunjukkan tangkapan layar sinyal bus CAN kecepatan tinggi yang benar.
Ketika sinyal seperti itu diukur dan banyak kebisingan terlihat, disarankan untuk melepas pengisi daya baterai dari kendaraan dan menghubungkan osiloskop ke ground kendaraan (lingkup Otomotif memiliki koneksi " ground” di bagian belakang) dan sinyal dapat dibuat lebih murni dengan frekuensi sampel. Kecepatan sampel memperhalus sinyal, jadi jika menyimpang terlalu jauh dari nilai standar, sinyal CAN mungkin terlalu terdistorsi.
Untuk lebih jelasnya, pada gambar di bawah, CAN-high berwarna merah dan CAN-low berwarna biru.
Korsleting setinggi CAN ke ground:
Di CAN tinggi ada ground short. Jika insulasi rusak, kabel dapat bersentuhan dengan bodi, atau di ECU terjadi korsleting ke ground.
Pada pengukuran di bawah terlihat tinggi CAN (merah) tepat 0 volt, karena ada hubungan pendek ke ground. CAN-low (biru) berada sedikit di atas garis nol. Saat memperbesar sinyal ini, hal ini akan menjadi lebih jelas. Karena CAN-high tepat 0 volt dan CAN-low lebih tinggi beberapa persepuluh volt, kita dapat menyimpulkan bahwa CAN-high memiliki hubungan pendek dengan ground.
CAN-rendah korsleting ke ground:
Ada kekurangan pada level terendah CAN. Jika insulasi rusak, kabel dapat bersentuhan dengan bodi, atau di ECU terjadi korsleting ke ground.
Pada pengukuran di bawah ini kita melihat bahwa CAN-low adalah 0 volt. Meskipun ada beberapa kebisingan yang terlihat, kita dapat mengabaikannya. CAN-low dihubung pendek ke ground. Kami melihat saluran tegangan tinggi CAN terus naik, tapi itu tidak cukup untuk memulai komunikasi. Gambar lingkup juga menunjukkan bahwa tegangan CAN-rendah selalu lebih rendah daripada CAN-tinggi (merah selalu sedikit lebih tinggi dari biru), yang berarti kita dapat berasumsi bahwa CAN-rendah mengalami hubungan pendek ke ground.
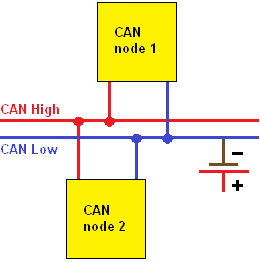
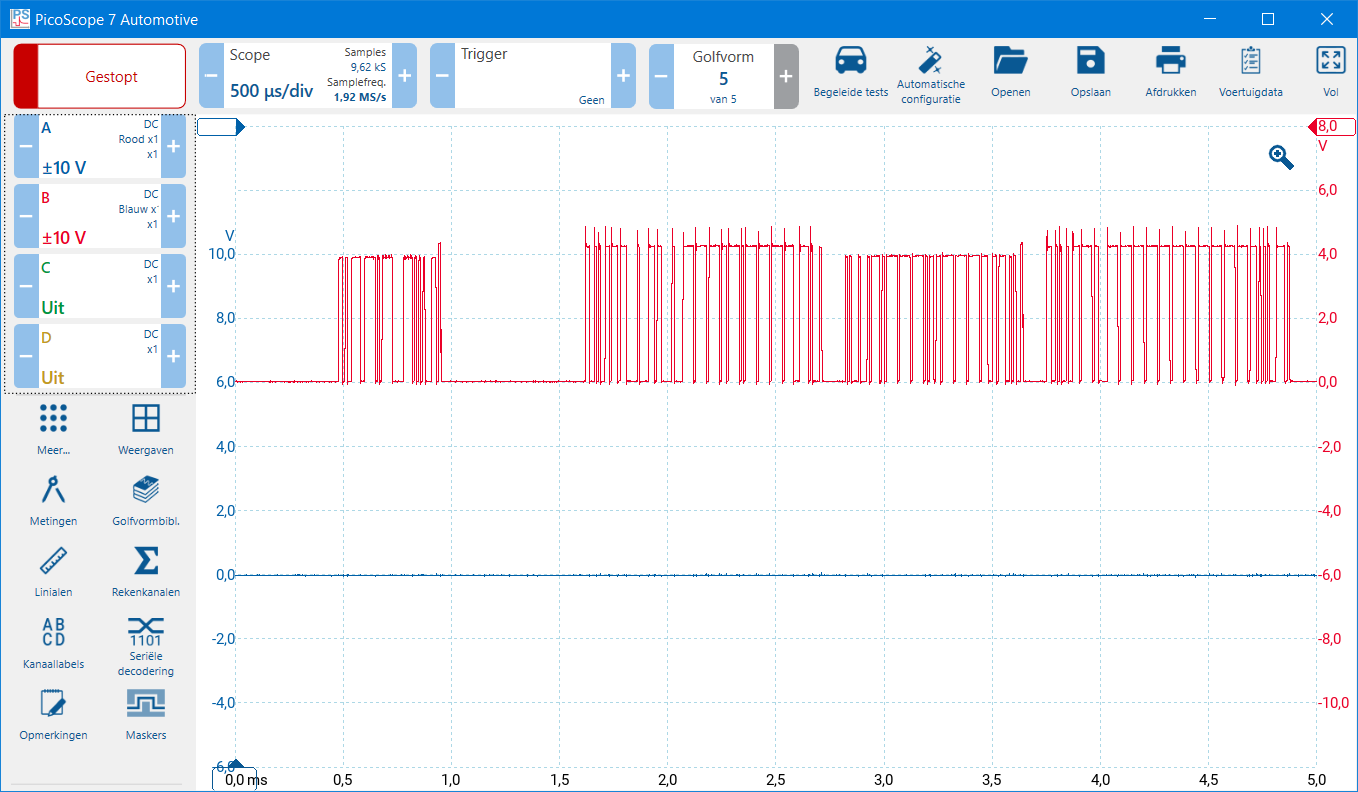
Korsleting setinggi CAN ke plus:
Pada titik tertinggi CAN terdapat penutupan positif. Jika isolasi beberapa kabel pada rangkaian kabel rusak, kabel dapat bersentuhan satu sama lain, atau di ECU terjadi korsleting dengan positif.
Pada gambar di bawah kita melihat fenomena yang menyerupai situasi di mana CAN-low mengalami hubungan pendek ke ground. CAN-high (merah) telah meningkat ke tegangan on-board sekitar 12 volt. CAN-low (biru) juga mengalami peningkatan tegangan dan masih mencoba berkomunikasi dengan menurunkan sinyal. Karena tidak ada komunikasi yang terjalin, puncak tegangan negatif terus berulang.
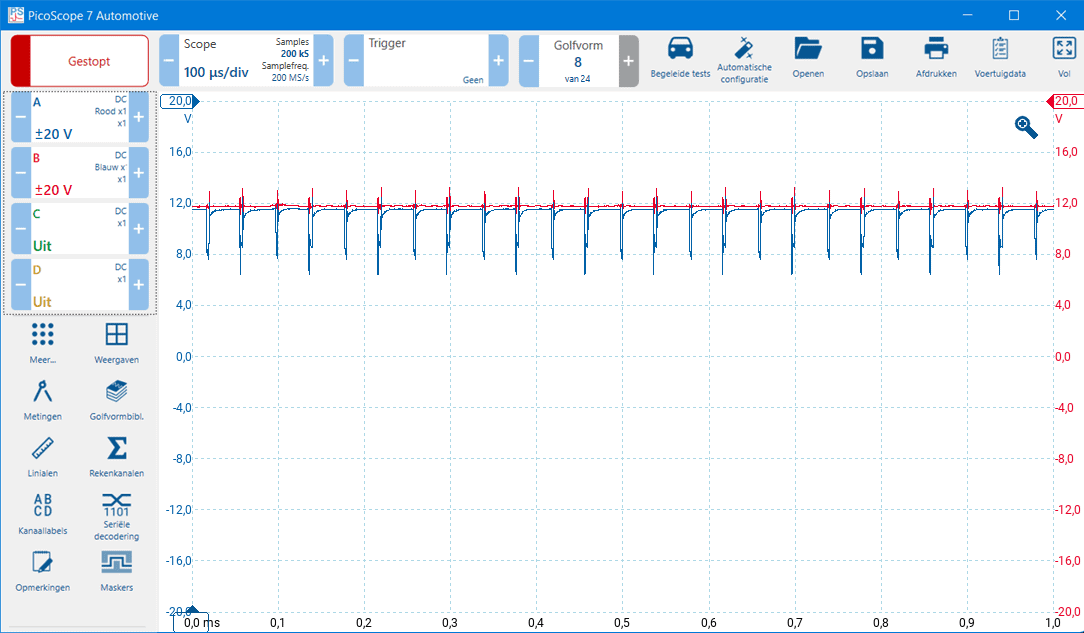
CAN-rendah korsleting ke plus:
CAN-rendah memiliki sirkuit positif. Jika isolasi beberapa kabel pada rangkaian kabel rusak, kabel dapat bersentuhan satu sama lain, atau di ECU terjadi korsleting dengan positif.
Pada pengukuran di bawah ini kita melihat bahwa CAN-high dan CAN-low adalah sekitar 12 volt. Namun tegangan CAN-rendah sekitar 200 mV lebih tinggi dari CAN-tinggi. CAN-low juga ikut mengangkat CAN-high. Hal ini menunjukkan bahwa CAN-low dihubung pendek dengan plus.
Korsleting CAN-tinggi dengan CAN-rendah:
CAN-rendah berubah menjadi profil tegangan CAN-tinggi ketika keduanya terhubung satu sama lain. Hubungan pendek antara CAN-high dan CAN-low dapat terjadi pada kabel, dimana isolasi kedua kabel bus CAN telah aus, atau karena cacat pada papan sirkuit cetak ECU.
Pada gambar di bawah kita melihat pengukuran dua saluran di mana CAN-high dan CAN-low dihubung pendek satu sama lain. Tegangan pada kedua saluran adalah 2,5 volt.
Diagnosis dengan multimeter:
Mengukur level tegangan bus CAN dengan multimeter tidaklah bijaksana. Multimeter menampilkan nilai rata-rata pada banyak tegangan yang bervariasi, sehingga diagnosis yang tepat tidak dapat dibuat. Osiloskop harus digunakan untuk mengukur tegangan.
Kita dapat menggunakan multimeter untuk mengukur resistansi (hanya) jaringan CAN berkecepatan tinggi dengan resistor terminasi. Pengukuran di bawah ini menunjukkan resistansi ohmik dalam tiga situasi berbeda: sistem berfungsi dengan benar, kabel terbuka, dan hubungan pendek antara CAN-high dan CAN-low. Dalam jaringan rendah/menengah (nyaman), resistor pengakhiran jarang digunakan, dan pengukuran ini tidak dapat dilakukan.
Bebas gangguan:
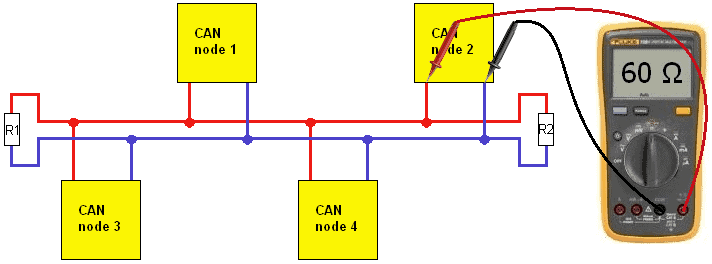
Di halaman BISA bis dijelaskan bahwa ada dua resistor pengakhiran dalam jaringan. Resistor pengakhiran keduanya memiliki resistansi 120 ohm. Dalam sistem bebas masalah kami akan mengukur resistansi pengganti sebesar 60 ohm antara CAN-high dan CAN-low.
Harap diperhatikan: kami hanya dapat mengukurnya jika catu daya ke semua unit kontrol dimatikan!
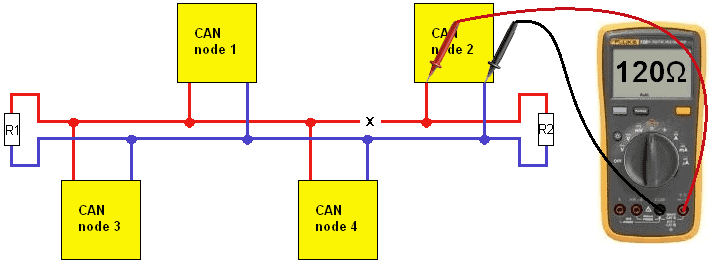
Gangguan:
Jika terjadi gangguan pada kabel CAN-high atau CAN-low, kami tidak lagi mengukur resistansi penggantian sebesar 60 ohm. Pada gambar kita hanya mengukur nilai resistor R2 (120 ohm).
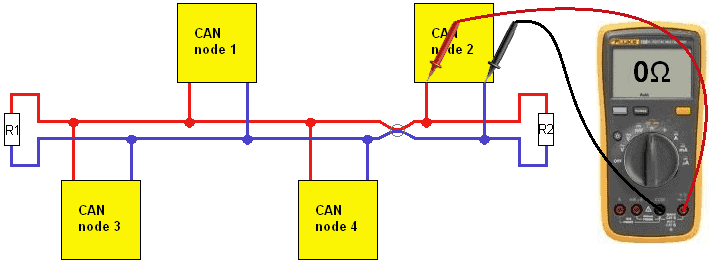
Hubungan pendek:
Dalam situasi di mana kabel bus CAN terhubung satu sama lain (yaitu dihubung pendek satu sama lain), kami mengukur nilai resistansi sekitar 0 ohm.
Pada gangguan berikutnya, kedua kabel CAN terputus. Saat ini akan banyak gangguan (kebisingan) pada bus. Node 1, 3 dan 4 dapat berkomunikasi satu sama lain asalkan interferensi dan refleksinya terlalu besar sehingga menyebabkan pesan terdistorsi. Dengan demikian, node 2 dan 5 juga dapat berkomunikasi satu sama lain dengan permasalahan yang sama.
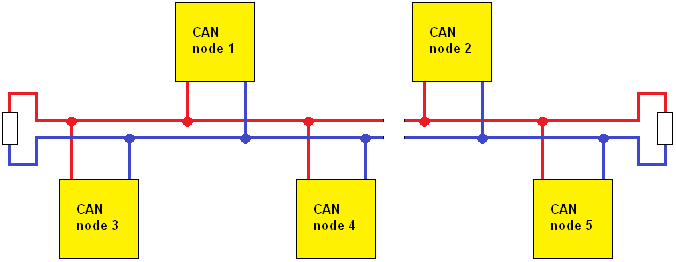
Beberapa jaringan CAN juga berfungsi ketika satu kabel terputus. Kode kesalahan akan disimpan dan pengemudi akan diberitahu melalui lampu peringatan melalui pesan dari berbagai sistem. Ini adalah jaringan yang dilengkapi dengan transceiver Fault Tolerante CAN. Tergantung pada transceiver yang digunakan, berbagai jenis kesalahan dapat terjadi tanpa kehilangan komunikasi antar node. Transceiver CAN ini juga dapat berfungsi normal dengan gangguan yang disebutkan di atas dengan korsleting ke plus dan ground (tentu saja dengan berbagai pesan kesalahan).
Halaman terkait: