Subyek:
- ESP umum
- Nama lain dari ESP
- Understeer
- Gundah
- Sensor sudut kemudi
- Sensor percepatan melintang (G-sensor)
- Sensor momen yaw (sensor yaw)
- Sensor tekanan rem
ESP umum:
ESP adalah singkatan dari Electronic Stability Program dan bekerja bersama dengan ABS dan ASR. Jika kendaraan dilengkapi dengan ABS (Anti-lock Braking System) dan ASR/ASC (Anti-Slip Regulation/Control), sistem ESP dapat ditambahkan dengan bantuan sejumlah sensor tambahan dan penyesuaian software. Komponen seperti sensor kecepatan roda dan pompa/unit kontrol ABS juga digunakan untuk sistem ESP. Sistem ESP juga mengatur pengurangan tenaga mesin; dengan menutup throttle lebih banyak, atau dengan mematikan kunci kontak.
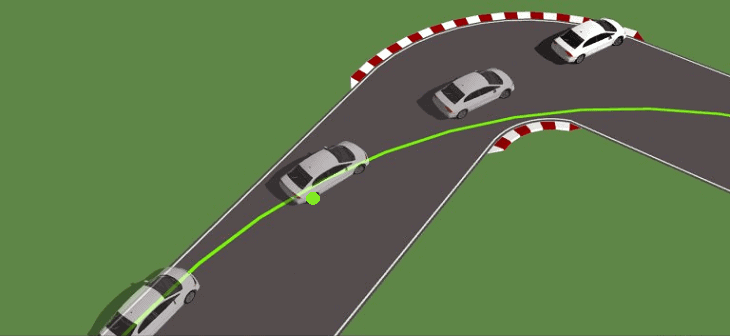
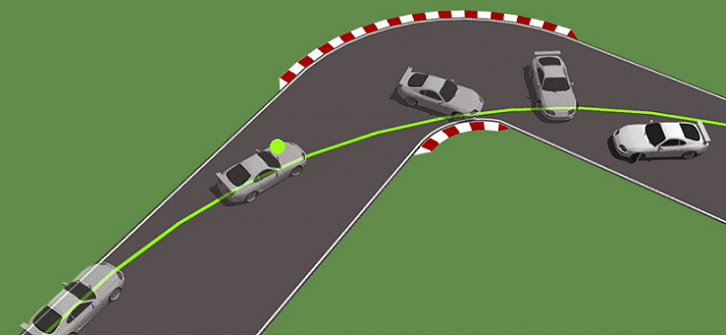
Tujuan dari sistem ESP adalah untuk memperbaiki perilaku menikung (understeer dan oversteer). Hal ini berlaku, antara lain, pada situasi di mana pengereman dilakukan di tikungan, atau saat terjadi manuver mengelak. Sistem ESP mengerem salah satu roda kendaraan, sehingga karakteristik kemudi kembali normal. Di bawah ini adalah 2 situasi di mana roda yang ditandai dengan warna hijau direm. Dengan mengerem, kendaraan akan mengikuti garis hijau, bukannya lepas kendali. Berbagai komponen ESP yang diperlukan dijelaskan di bagian bawah halaman ini.
Nama lain untuk ESP:
Pabrikan mobil sering kali menggunakan nama ESP sendiri untuk modelnya, padahal pengoperasiannya sama. Nama-nama lain ini diberikan untuk membuat sistem tampil "lebih mewah" dibandingkan ESP standar. Contohnya adalah:
- ASC + T: Stabilitas Otomatis & Kontrol Traksi (BMW generasi lama sebelum tahun 1996)
- DSC: Program Stabilitas Dinamis: BMW, Jaguar, Land Rover, Mazda, Mini
- DSTC: Stabilitas Dinamis dan Kontrol Traksi (Volvo)
- ESP: Program Stabilitas Elektronik (Alfa Romeo, Audi, Cadillac, Chevrolet, Chrysler, Citroen, Fiat, Ford, Hyundai, Jeep, Kia, Mercedes, Mitsubishi, Nissan, Opel, Peugeot, Renault, Saab, Seat, Skoda, Smart, Suzuki , Volkswagen
- PSM: Manajemen Stabilitas Porsche (Porsche)
- VDC: Kontrol Dinamis Kendaraan (Alfa Romeo)
- VDCS: Sistem Kontrol Dinamis Kendaraan (Subaru)
- VSC: Kontrol Stabilitas Kendaraan (Lexus, Toyota)
- VSA: Bantuan Stabilitas Kendaraan (Honda)
Kemunduran:
Understeer terjadi ketika ban depan tidak lagi memiliki daya cengkeram yang cukup pada permukaan jalan. Mobil akan berbelok lebih lembut dari yang diharapkan, sehingga memiliki kecenderungan lebih besar untuk melaju lurus. Oleh karena itu, roda depan akan meluncur ke luar tikungan. Understeer dapat dihilangkan untuk memastikan roda depan kembali memiliki cengkeraman yang cukup pada permukaan jalan. Untuk mencapai hal ini, Anda dapat menggunakan lebih sedikit bahan bakar atau mengurangi kemudi. Kemudi yang lebih banyak lagi tidak akan membantu mengatasi understeer, bahkan dapat memperburuk keadaan karena cengkeraman roda hanya akan berkurang. Kebanyakan pabrikan mobil menyesuaikan sasis sedemikian rupa sehingga mobil cenderung mengalami understeer dibandingkan oversteer. Pasalnya, rata-rata pengemudi langsung melepas gas dalam situasi seperti itu (yang bisa menjadi solusi agar mobil kembali grip).
Gundah:
Oversteer terjadi ketika ban belakang tidak lagi mencengkram permukaan jalan. Ban belakang mobil akan meluncur ke arah luar tikungan. Bagian belakang kemudian ingin menyalip bagian depan sehingga menyebabkan kendaraan berputar pada porosnya. Oversteer dapat diperbaiki dengan counter-steering dan memperlambat untuk mobil berpenggerak roda belakang (misalnya BMW) dan sedikit lebih banyak bahan bakar untuk mobil berpenggerak roda depan (misalnya Volkswagen). Seringkali, terutama dalam olahraga motor, penggunaan oversteer dilakukan secara sadar untuk melewati kombinasi tikungan dengan lebih mudah dan cepat. Dalam kasus ekstrim, bentuk gangguan ini disebut “drifting”. Oversteer umumnya lebih berbahaya daripada understeer, karena sebagian besar pengemudi cenderung tidak bisa memperbaikinya. Itu sebabnya saat mendesain mobil, sasisnya lebih disesuaikan ke arah 'understeer' karena lebih mudah diperbaiki.
Sensor sudut kemudi:
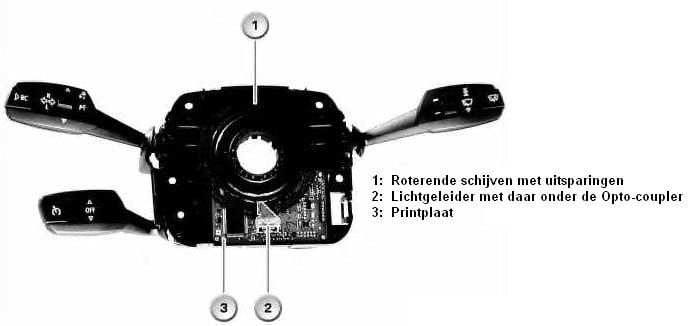
Sensor sudut kemudi dipasang pada kolom kemudi. Ini bisa berada di dekat rak kemudi, tetapi juga di bagian dalam antara tuas lampu sein/wiper, seperti yang ditunjukkan pada gambar di sebelah kanan. Ini adalah saklar kolom kemudi dari BMW.
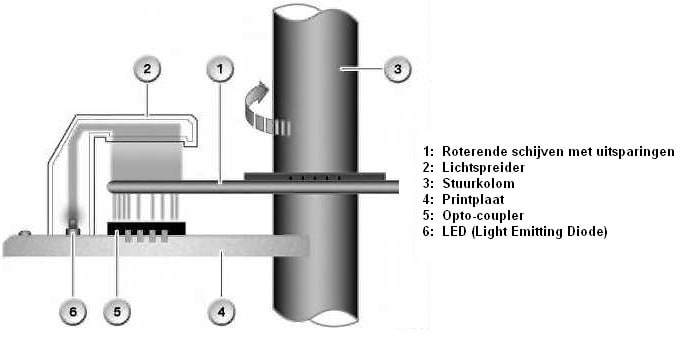
Tugas sensor sudut kemudi adalah mengukur sudut putaran roda kemudi. Sensor ini menggunakan satu atau lebih opto-skrup yang mengukur transmisi cahaya dari disk yang berputar. Celah cahaya berbeda di setiap lokasi pada cakram yang berputar, sehingga posisi roda kemudi dapat dikenali dengan tepat. Semua ceruk pada cakram menciptakan sinyal persegi yang asimetris. Opto-coupler dapat mengubah sinyal cahaya menjadi tegangan yang kemudian diteruskan ke unit kontrol.
Sensor percepatan melintang (G-sensor):
Sensor percepatan lateral (juga disebut G-sensor gaya G) ditempatkan sebanyak mungkin di tengah mobil. Saat menikung, pelat yang dapat digerakkan (lihat gambar di bawah, nomor 2) bergeser di antara kapasitor (1). Kapasitor mempunyai tegangan 5 volt. Saat pelat berada di tengah (yaitu saat mobil melaju lurus) tegangan pada kedua kapasitor adalah 2,5 volt. Ketika mobil berbelok (pada gambar sebelah kiri), pelat bergeser ke satu sisi akibat gaya sentrifugal dan gaya sentripetal.
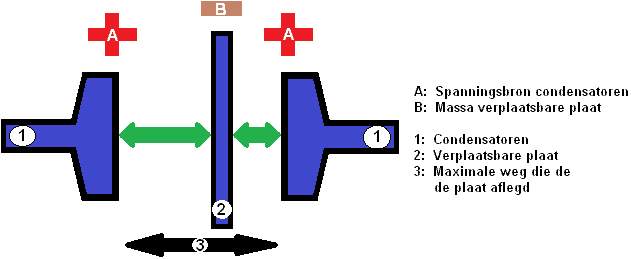
Ketika pelat bergeser, kapasitansi kapasitor kanan turun. Ini sekarang bukan 2,5 Volt tetapi, misalnya, 1,5V. Unit kontrol ESP mengenali perbedaan antara kedua kapasitor dan dapat menentukan dari sini seberapa besar gaya sentrifugal atau gaya sentripetal (yaitu seberapa tajam tikungan yang terjadi. Dengan cara ini dapat ditentukan apakah mobil mengalami oversteering, misalnya) . Nilai sensor akselerasi lateral ini digunakan untuk membandingkan data dari sensor kecepatan roda dan menentukan apakah sistem ESP harus melakukan intervensi.
Sensor momen yaw (sensor yaw):
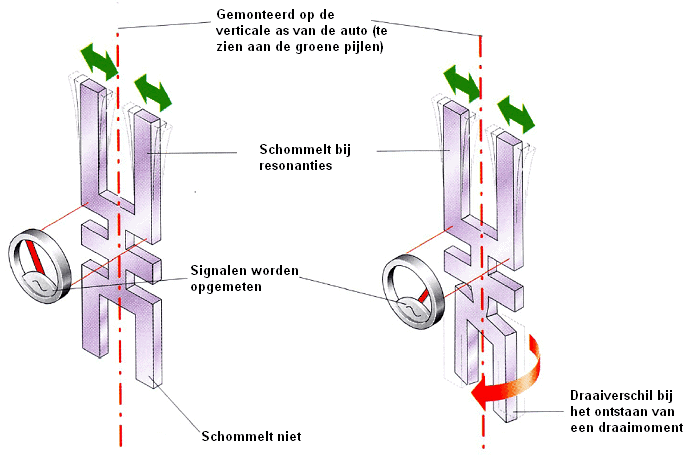
Sensor momen yaw, disebut juga “Yaw sensor” dalam bahasa Inggris, ditempatkan sebisa mungkin di tengah mobil bersama dengan sensor akselerasi lateral. Sensor menyediakan data yang dibutuhkan sistem ESP. Sensor momen yaw mencatat kecenderungan kendaraan untuk berputar pada sumbu vertikal. Nilai pengukuran ini disebut kecepatan rotasi dan ditampilkan dalam derajat per detik.
Sensornya terdiri dari dua garpu tala. Garpu tala bagian atas dibuat bergetar (resonansi) pada frekuensi 11000 Hz (11kHz) dengan tegangan bolak-balik dan berputar saat kendaraan melewati tikungan. Semakin tajam tikungannya, semakin banyak pula putaran garpu tala bawah dibandingkan dengan garpu tala atas. Prinsipnya didasarkan pada gaya giroskopik (gaya Coriolis). Ketika bagian yang berputar dipindahkan keluar dari posisinya dengan torsi, gaya giroskopik tercipta. Oleh karena itu dinamakan sensor momen yaw.
Karena torsi, elemen piezo menghasilkan perbedaan tegangan yang diukur oleh perangkat kontrol. Tegangan yang dihasilkan bervariasi antara 0 dan 5 volt. Dalam posisi istirahat (bila tidak ada putaran yang tercatat) sensor memancarkan 2,5 volt.
Sensor tekanan rem:
Sensor tekanan hidrolik terpisah juga telah ditambahkan ke sistem pengereman (di kedua sirkuit), yang dapat dilihat pada gambar di bawah. Pada mobil tua, sensor ini terletak di saluran rem. Saat ini, sensor tekanan rem biasanya dipasang pada unit hidrolik sistem ABS itu sendiri. Unit ini sering terlihat di bawah tenda. Semua saluran rem hidrolik terhubung ke sini.

