Subyek:
- Sejarah
- Doel
- Operasi
- Sensor kecepatan
- Agregat hidro
- Sirkuit hidrolik
- Siklus kontrol ABS
- Prinsip kontrol untuk mencegah µ-split
- Pengukuran kendaraan dengan dan tanpa ABS
Sejarah:
ABS (singkatan dari Anti-lock Braking System) Pada awal tahun 1961, produsen ban Dunlop berhasil bereksperimen dengan ABS pada mobil balap Formula 99 Ferguson P1. Itu sekitar empat belas tahun sebelum sesuatu yang serupa diperkenalkan pada mobil 'normal'. Saat ini semua mobil baru sudah dilengkapi dengan ABS.
Tujuan:
Tujuan dari ABS adalah memanfaatkan daya rekat maksimum antara ban dan permukaan jalan saat berkendara. ABS juga memastikan kestabilan berkendara tetap terjaga. Ini termasuk:
- Stabilitas kemudi: saat ABS diaktifkan, kendaraan tetap dapat dikemudikan. Dengan roda yang tergelincir, kendaraan meluncur ke satu arah dan gerakan kemudi tidak dapat dialihkan ke permukaan jalan.
- Stabilitas jalur: jika roda terkunci, kendaraan dapat mengambil jalur berbeda. Misalnya, roda belakang yang menghalangi dapat menyebabkan kendaraan berputar pada porosnya sehingga menyebabkan kendaraan terjatuh ke belakang di jalan.
Operasi:
Sistem pengereman bertanggung jawab untuk mengerem roda. Roda dalam keadaan apa pun tidak boleh terkunci, karena akan kehilangan cengkeramannya pada permukaan jalan. Roda kemudian meluncur di atas aspal sehingga gerakan kemudi tidak bisa lagi diteruskan. Dalam hal ini kendaraan tidak dapat dikendalikan. Sistem ABS mencegah roda tersumbat.
Saat roda terancam terkunci, sistem ABS memastikan tekanan rem (tekanan minyak rem pada silinder rem roda) pada roda yang bersangkutan berkurang. Pada saat itu tidak menjadi masalah seberapa keras Anda menginjak pedal rem dengan kaki Anda. Sistem ABS mengatur tekanan rem agar roda tidak selip. Pada titik tertentu, sistem ABS secara bertahap akan menambah tekanan lagi, karena tentu saja roda harus direm semaksimal mungkin. Hal ini berlanjut hingga batas slip tercapai kembali; kemudian tekanannya diturunkan lagi. Proses ini memakan waktu beberapa milidetik. Getaran kemudian dapat dirasakan pada pedal rem. Pompa ABS sering terdengar.
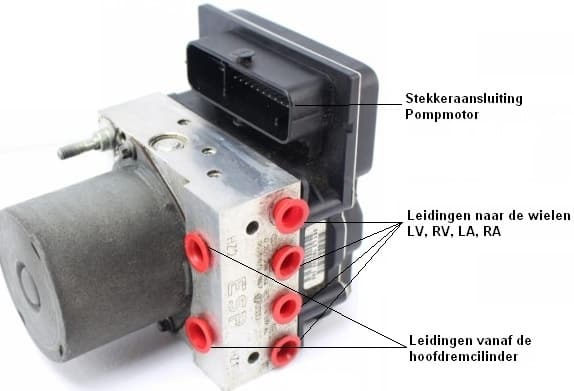
Gambar di bawah menunjukkan gambaran umum komponen sistem ABS.
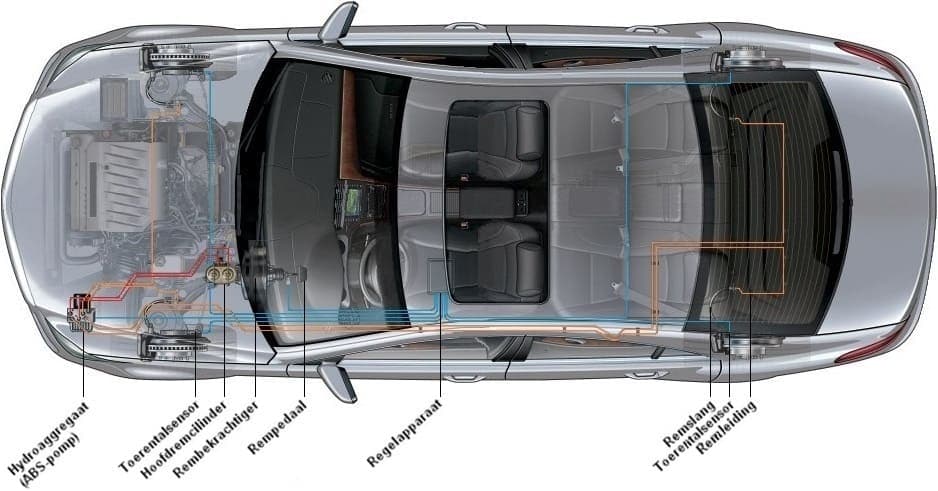
Gambar di atas menunjukkan dua pipa berwarna merah. Ini dijalankan dari silinder rem utama ke unit hidrolik. Hydro agregat adalah kata lain dari pompa ABS. Kedua garis merah tersebut berkaitan dengan sistem pengereman terpisah; kiri depan dengan kanan belakang dan kanan depan dengan kiri belakang. Misalnya saja terjadi kebocoran pada roda kiri depan sehingga menyebabkan seluruh minyak rem bocor, Anda tetap bisa mengerem dengan rangkaian rem yang lain. Pipa oranye mengalir dari unit hidrolik ke semua roda. Pada unit hidrolik, gaya pengereman dapat diatur per roda.
Sensor kecepatan dipasang di setiap roda. Hal ini memungkinkan kecepatan keempat roda terus dipantau. Garis biru adalah kabel sinyal yang terhubung ke sensor kecepatan. Kabel sinyal dipasang dari setiap roda ke unit kontrol. Sinyal dari pedal rem dan dari unit hidrolik juga masuk ke unit kontrol. Pada mobil yang diperlihatkan, letaknya di bawah jok, di bagian dalam mobil. Saat ini Anda semakin sering melihat bahwa unit kendali terpasang pada unit hidrolik. Ini kemudian menjadi satu kesatuan. Jika terjadi kerusakan pada sistem, misalnya karena sensor rusak atau kotor, kabel rusak, atau unit hidrolik rusak, lampu kerusakan di panel instrumen akan menyala. Kesalahannya kemudian dapat dibaca dengan peralatan diagnostik.
Sensor kecepatan:
Gambar di bawah menunjukkan sensor kecepatan induktif dalam keadaan terpasang. Ini adalah foto penyangga McPherson pada suspensi depan. Cincin roda gigi, tempat sensor mengukur kecepatan, juga bisa dilihat di sini.
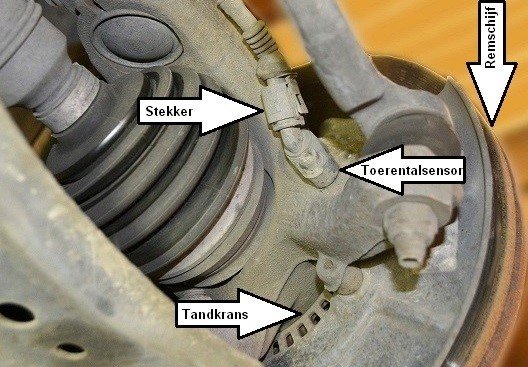
Sensor ABS dapat dirancang sebagai sensor induktif (lihat gambar di atas), atau sebagai sensor resistif magnet (sensor MRE), atau sensor Hall (lihat gambar di sebelah kanan). Pengoperasian sensor ini ditunjukkan pada halaman Sensor aula dijelaskan. Sensor terakhir digunakan untuk cincin magnet ABS yang ada di dalamnya bantalan roda sedang diproses.
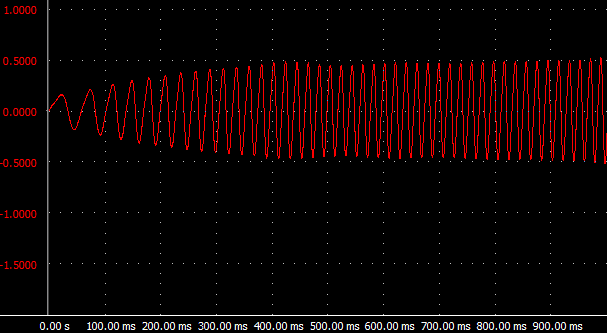
Sinyal dari sensor induktif dan Hall dapat digunakan dengan osiloskop diukur. Contoh pengukuran ini ditunjukkan dan dijelaskan di bawah.

Sensor kecepatan induktif:
Sensor kecepatan induktif terdiri dari magnet permanen dengan kumparan di sekelilingnya. Kuat medan magnet berubah ketika gigi cincin bergigi (melekat pada poros penggerak) bergerak melalui medan magnet magnet permanen. Perubahan medan magnet menyebabkan timbulnya tegangan pada kumparan. Setiap periode dalam sinyal kecepatan berhubungan dengan lewatnya gigi melewati sensor. Jumlah gigi pada ring dan kecepatan putaran poros penggerak menentukan frekuensi dan amplitudo sinyal.
Sensor aula:
Juga dengan sensor resistif magnet (sensor MRE), atau sensor Hall, cincin logam dengan magnet bergerak di sepanjang sensor. Cincin magnet terletak di batang penggerak atau di dalamnya bantalan roda. Frekuensi tegangan blok tergantung pada kecepatan putaran dan jumlah gigi cincin logam. Amplitudo (ketinggian sinyal) tetap sama.
Sensor MRE memerlukan catu daya untuk beroperasi. Namun sensor ini seringkali hanya memiliki dua kabel (dan karenanya memiliki dua sambungan). Sensor mengirimkan sinyal ke unit kontrol ABS melalui kabel negatif. Sinyal terbentuk karena hambatan listrik pelat semikonduktor berubah ketika terkena medan magnet yang berubah.
Sinyal dari sensor kecepatan dikirim ke unit kontrol ABS. Sinyal dari empat roda dibandingkan satu sama lain. Pada saat kendaraan melewati suatu tikungan, kecepatan roda pada tikungan dalam akan lebih rendah dibandingkan dengan kecepatan roda pada tikungan luar. Hal ini terukur, namun tentu saja masih dalam batasan.
Jika perbedaan kecepatan terlalu jauh saat pengereman, unit kontrol ABS akan memastikan bahwa unit hidrolik akan mengurangi tekanan pengereman pada roda terkait (pengereman terlalu keras). Jika perbedaan kecepatan terlalu besar saat akselerasi, tenaga mesin akan berkurang secara tiba-tiba oleh sistem manajemen mesin.
Jika terjadi malfungsi pada sistem ABS, sinyal dapat diukur dengan osiloskop. Ini tidak hanya dapat diukur pada kemudi, tetapi juga pada perangkat kontrol. Dengan mengukur pada kemudi Anda dapat memeriksa apakah sensor ABS berfungsi dengan baik. Ketika pengukuran dilakukan di unit kontrol, dapat dikesampingkan apakah penyebab kegagalan fungsi adalah kabel yang rusak.
Selama pengukuran dapat diperiksa apakah frekuensi dan amplitudo sensor induktif sudah benar. Dengan sensor Hall Anda dapat memeriksa apakah frekuensi sinyal sudah benar saat roda berputar. Caranya, putar roda satu putaran penuh agar cacat pada gigi dapat segera diketahui. Dengan gigi yang rusak, penyimpangan kemurnian sinyal sensor akan terlihat (bayangkan frekuensi yang lebih lebar dari yang diharapkan pada setiap putaran).
Agregat hidro:
Gambar kiri bawah menunjukkan pembangkit listrik tenaga air dengan perangkat kontrol bawaan. Hal ini antara lain terlihat dari banyaknya pin pada sambungan colokan.
Sambungan pipa dari master rem silinder ke roda juga terlihat di sini. Sirkuit pengereman terpisah (kiri depan dengan kanan belakang dan kanan depan dengan kiri belakang) tergabung dalam unit pompa ini.
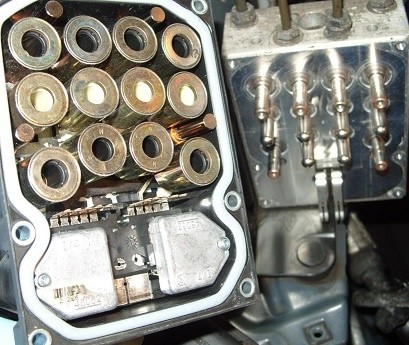
Saat kami membongkar unit hidrolik, blok katup dapat terlihat. Gambar di kanan bawah menunjukkan bagian dalam pembangkit listrik tenaga air.
Sirkuit hidrolik:
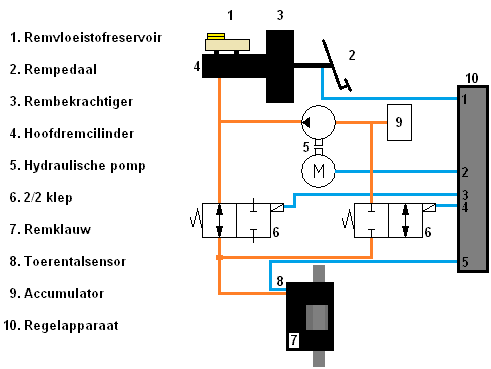
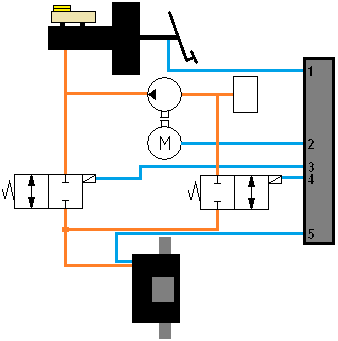
Diagram hidrolik di bawah menunjukkan komponen di dalam dan sekitar unit hidrolik. Untuk memahami pengoperasian, bagian dan simbol, halaman prinsip dasar hidrolika dikonsultasikan.
Diagram di bawah ini digambar untuk satu roda. Nomor 5, 6 dan 9 bersifat internal. Roda lainnya menggunakan komponen yang sama, kecuali katup 2/2 (6), hanya sambungannya yang berbeda. Dengan kata lain, jika diagram mobil lengkap digambar, akan ada enam katup 2/2 di sebelahnya, masing-masing dengan pipanya sendiri. Untuk memperjelas, sekarang hanya diagram untuk satu rangkaian rem yang ditampilkan.
Situasi 1: Tanpa pengereman yang stabil:
Diagram di sebelah kanan menunjukkan situasi tanpa pengereman yang stabil. Pedal rem (2) ditekan sehingga menyebabkan tekanan fluida diberikan oleh silinder rem master (4) pada katup 2/2 kiri (6). Katup 2/2 ini memiliki sambungan terbuka ke kaliper rem (7). Karena tekanan minyak rem ke kaliper rem meningkat, maka kampas rem akan menekan cakram rem. Rem kemudian akan diterapkan. Sensor kecepatan (8) mencatat jumlah putaran roda.
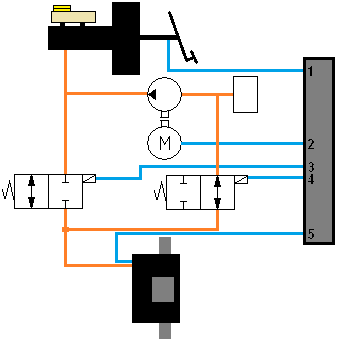
Situasi 2: ABS aktif, pertahankan tekanan rem:
Diagram ini menunjukkan situasi ketika terjadi pengereman berat dan perlambatan roda terlalu besar. Sensor ABS pada rem telah mengirimkan sinyal kecepatan ke terminal 5 unit kendali, yang lebih rendah dibandingkan dengan roda lainnya. Unit kontrol merespons hal ini dan menutup sistem ke kaliper rem.
Hal ini dilakukan sebagai berikut: arus tertentu dialirkan ke pin 3 perangkat kontrol, yang memberi energi pada katup solenoid di katup 2/2 kiri. Katup terdorong ke kiri melawan gaya pegas. Hal ini menghalangi akses minyak rem baru ke kaliper rem. Katup 2/2 sebelah kanan tetap pada posisi yang sama, sehingga tidak ada minyak rem yang bisa masuk ke rem atau kembali. Ini menjaga tekanan tetap konstan. Unit kendali memeriksa kembali apakah perbedaan kecepatan antara roda yang bersangkutan dengan roda lainnya terlalu jauh berbeda. Jika perbedaan kecepatan timbal balik minimal, atau tidak ada lagi perbedaan kecepatan karena tekanan rem dijaga konstan, unit kontrol akan kembali memutus arus dari pin 3. Katup 2/2 kembali ke posisi semula, sehingga situasi 1 berlaku kembali. Jika perbedaan kecepatan tidak berubah, atau bahkan menjadi lebih besar, maka tekanan pengereman roda yang bersangkutan harus dikurangi. Ini terjadi pada situasi 3.
Situasi 3: ABS aktif, kurangi tekanan rem:
Untuk menurunkan tekanan rem, minyak rem harus dipompa keluar ke saluran antara katup 2/2 dan kaliper rem. Hal ini dilakukan pada diagram di atas.
Sekarang pin 4 juga disuplai daya, sehingga katup 2/2 kanan diberi energi. Sekarang juga dipindahkan ke posisi kiri, membebaskan jalur antara kaliper rem dan pompa hidrolik. Pada saat inilah motor pompa akan berputar dan memompa minyak rem dari kaliper rem ke master silinder. Cairan tersebut sekarang dipompa kembali ke reservoir melawan kekuatan silinder rem utama. Tekanan berkurang dan roda akan mulai berputar kembali.
Kesimpulan:
Situasi 1 berlaku saat mengemudi dan mengerem ringan. Saat pengereman dimana roda terancam terkunci, situasi 2 dan tekanan harus dikurangi karena roda menghalangi, situasi 3. Selama pengereman situasi akan terus berubah. Jika terjadi situasi 3, dimana minyak rem dipompa keluar dari rem, maka roda harus direm kembali. Jika tidak, kendaraan tidak akan mampu mengerem dengan cukup kuat. Pengemudi kemudian beralih kembali ke situasi 1, kemudian situasi 2 lagi dan kemudian situasi 3. Hal ini terjadi sampai pengemudi berhenti mengerem, atau sampai dia mengemudi di permukaan berbeda yang, misalnya, lebih kaku (koefisien gesekan lebih tinggi) .
Siklus kontrol ABS:
Grafik di bawah menunjukkan siklus kendali ABS. Berbagai faktor ditambahkan, seperti kecepatan kendaraan (A) dengan kecepatan roda, percepatan lingkar roda (B), aktivitas sistem (C) dan tekanan rem (D).
Grafiknya juga dibagi menjadi 9 periode waktu. Perubahan terlihat setiap periodenya karena adanya penyesuaian sistem. Jangka waktu totalnya kira-kira 20 milidetik dan dibagi menjadi 9 bagian yang tidak sama. Di bawah grafik adalah penjelasan garis-garisnya.
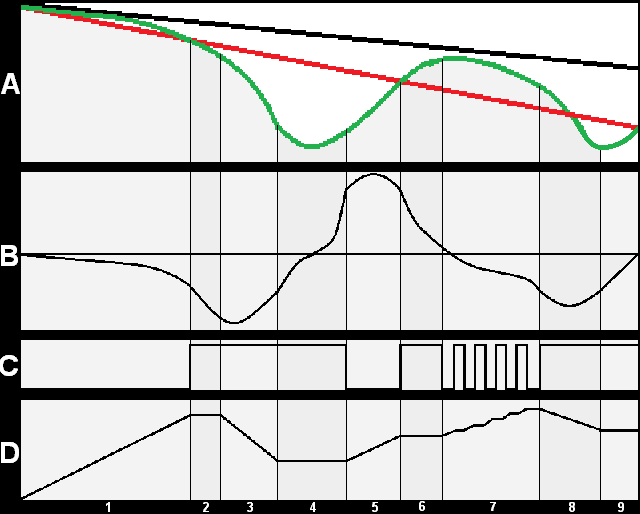
A: Garis hitam adalah kecepatan kendaraan, garis hijau adalah kecepatan roda dan garis merah adalah kecepatan acuan. Kecepatan kendaraan berkurang (periode 1), namun kecepatan roda berkurang jauh lebih cepat. Garis referensi merah terpotong. Ketika garis hijau berakhir di bawah garis merah (dari periode 2), roda dapat tergelincir. Oleh karena itu ABS akan melakukan intervensi.
B: Garis tersebut menunjukkan percepatan lingkar roda. Contoh: dengan memutar roda dan melambat secara perlahan, maka garis di B tetap mendekati garis nol. Dengan memutar roda pada kecepatan yang sama dan mengerem lebih kuat, garis akan semakin memanjang ke bawah. Hal ini juga terjadi saat mempercepatnya; dengan memutar roda sangat cepat dari 0 hingga 10 km/jam, garis akan semakin naik jika Anda membutuhkan waktu 5 detik untuk memutar roda dari 0 hingga 10 km/jam. Singkatnya, ini adalah percepatan lingkar roda.
C: Garis ini menunjukkan di mana tekanan dalam sistem distabilkan; ABS kemudian beroperasi. Bila garis di C rendah (di garis nol) maka sistem ABS tidak beroperasi. Pada periode 7, ABS dikontrol secara berdenyut agar kecepatan roda tidak berkurang terlalu cepat.
D: Garis ini menunjukkan tekanan pengereman. Tekanan rem meningkat hingga garis kecepatan roda hijau (A) memotong garis referensi merah. ABS mulai beroperasi (C) dan memastikan akselerasi lingkar roda tidak menjadi terlalu rendah. Percepatan lingkar roda berada pada garis nol pada periode 4; tepatnya saat ketika kecepatan roda di (A) berubah dari negatif ke positif. Tekanan dijaga konstan pada saat itu. Pada periode 7 kontrol yang berdenyut terlihat jelas. Tekanan pengereman kini ditingkatkan secara hati-hati agar roda tidak mengerem terlalu cepat.
Prinsip pengendalian untuk mencegah µ-split:
ABS dapat diatur secara individual per roda menggunakan informasi ini. Sensor kecepatan roda mencatat kecepatan setiap roda. Hal ini diperlukan karena dalam semua situasi, koefisien gesekan maksimum yang dapat dicapai harus dibandingkan dengan kemampuan kemudi kendaraan. Bila kendaraan melaju dengan roda kiri di atas aspal kering dan roda kanan di bahu jalan lunak dan rem diterapkan dengan gaya pengereman penuh, maka kendaraan akan lepas kendali dan berputar pada porosnya. Perbedaan gaya pengereman antara roda di aspal dan di atas es menimbulkan momen yawing yang menimbulkan penyimpangan arah. Situasi ini disebut situasi µ-split. µ diucapkan sebagai “mu”. Untuk mencegah skenario ini, sejumlah prinsip pengendalian diterapkan:
- Kontrol individu (IR): tekanan rem diatur ke koefisien gesekan maksimum setiap roda. Hal ini dapat menyebabkan momen yaw yang tinggi, namun gaya pengereman maksimum dapat dicapai.
- Kontrol pilih-rendah (SL): roda dengan koefisien gesekan terendah menentukan tekanan pengereman untuk roda lainnya. Gaya pengereman maksimum yang dapat dicapai tidak digunakan, namun momen yawnya rendah.
- Kontrol pilih-tinggi (SH): roda dengan koefisien gesekan tertinggi menentukan tekanan pengereman untuk roda lainnya. Skema select-high hanya digunakan untuk skema ASR.
- Kontrol pilih-pintar atau modifikasi: selama pengereman, kontrol berubah dari pilih-rendah ke kontrol individual. Hal ini memungkinkan tercapainya kompromi antara momen yaw dan gaya pengereman maksimum. Skema ini sering diterapkan pada kendaraan komersial.
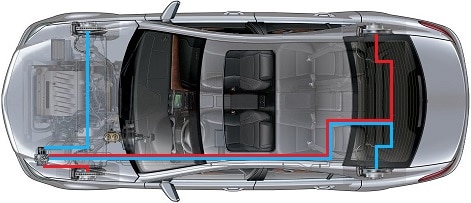
Biasanya sistem pengereman mobil penumpang dipisahkan secara diagonal (silang kiri). Contohnya ditunjukkan pada gambar di bawah. Ini menunjukkan sistem pengereman merah untuk kiri depan dan kanan belakang dan sistem pengereman biru untuk kanan depan dan kiri belakang.
Rem roda depan dikendalikan dengan kontrol individual (IR). Tekanan pengereman salah satu roda depan diatur ke koefisien gesekan maksimum roda depan lainnya. Selama penghentian darurat, roda depan akan mencari sendiri gaya pengereman maksimum yang dapat dicapai.
Rem roda belakang dikontrol berdasarkan prinsip select low (SL). Tekanan pengereman roda belakang yang disesuaikan dengan koefisien gesekan paling kecil menentukan tekanan pengereman roda belakang lainnya. Torsi pengereman kedua roda belakang akan tetap sama.
Pengukuran kendaraan dengan dan tanpa ABS:
Untuk mendapatkan gambaran yang baik tentang pengaruh sistem ABS pada kendaraan, bagian ini menunjukkan dua grafik pengukuran yang menunjukkan perbedaan antara kendaraan yang mengerem tanpa dan dengan ABS.
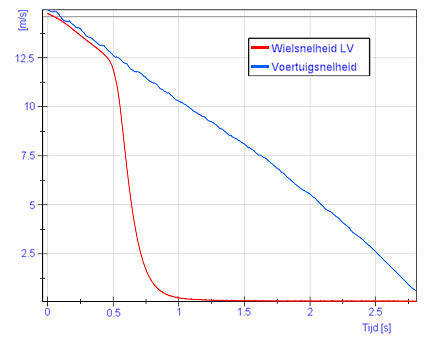
Kecepatan kendaraan relatif terhadap kecepatan roda tanpa ABS:
Grafik di sebelah kanan menunjukkan kecepatan kendaraan dibandingkan dengan kecepatan roda.
Dari t = 0 sekon kecepatan kendaraan adalah 15 meter per sekon. Saat itulah pedal rem ditekan secara maksimal. Kecepatan kendaraan berkurang secara linier hingga 0 m/s di antaranya
t = 2,75 dan 3,00 detik. Kecepatan roda turun sepenuhnya menjadi 0,5 m/s antara t = 1,0 dan 0 detik. Artinya roda tersebut sudah mempunyai kecepatan 0 m/s sehingga dalam keadaan diam, sedangkan kendaraan masih bergerak. Pada saat itu sebuah roda terhalang. Roda tergelincir di permukaan jalan saat kendaraan belum berhenti. Dalam situasi ini ABS tidak beroperasi.
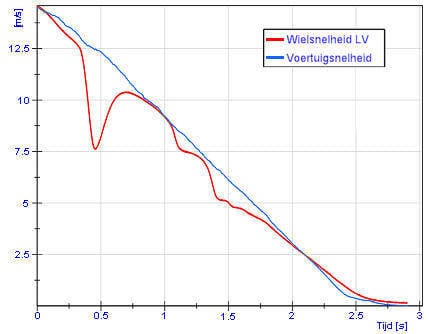
Kecepatan kendaraan relatif terhadap kecepatan roda dengan ABS:
Pada grafik di sebelah kanan, garis birunya sama; pada kecepatan kendaraan 15 m/s, pengereman maksimum dilakukan pada 0 m/s. Hal ini kembali terjadi dalam jangka waktu 3 detik. Sekarang ABS beroperasi, garis merah pada t = 0,3 detik tidak turun menjadi 0 m/s, tetapi kecepatan roda bertambah lagi. Hal ini terlihat dari garis merah yang mula-mula berjalan ke bawah dan naik kembali sesaat sebelum t = 0,5 detik. Tekanan pengereman dikurangi oleh ABS pada kecepatan 7,5 m/s. Kecepatan roda lainnya sama dengan kecepatan kendaraan sehingga sesuai dengan garis biru. Sensor ABS di roda depan kiri mendeteksi perlambatan. Komputer ABS mengenali perbedaan kecepatan, menyebabkannya melakukan intervensi. Tekanan pengereman dikurangi dengan unit hidrolik hingga garis biru dan merah kembali sama. Pada saat itu, tekanan rem dijaga agar tetap konstan. Hingga kendaraan berhenti, ABS terus mengontrol kecepatan roda penyaradan.
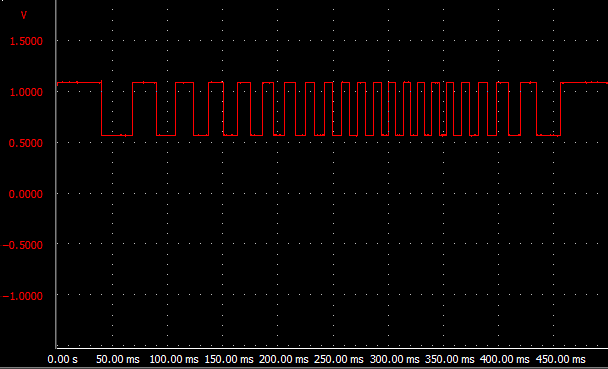
Tekanan pada silinder rem master dibandingkan dengan silinder rem roda tanpa ABS:
Gaya yang diberikan pada pedal rem diubah menjadi tekanan rem di dalam master rem silinder melalui perpindahan fluida. Tekanan pengereman ini ditunjukkan pada grafik di bawah ini dengan garis biru.
Terlepas dari apakah roda selip atau tidak, tekanan rem pada silinder rem roda (garis merah) tetap sama dengan tekanan pada silinder rem master. Jadi inilah situasinya tanpa ABS.
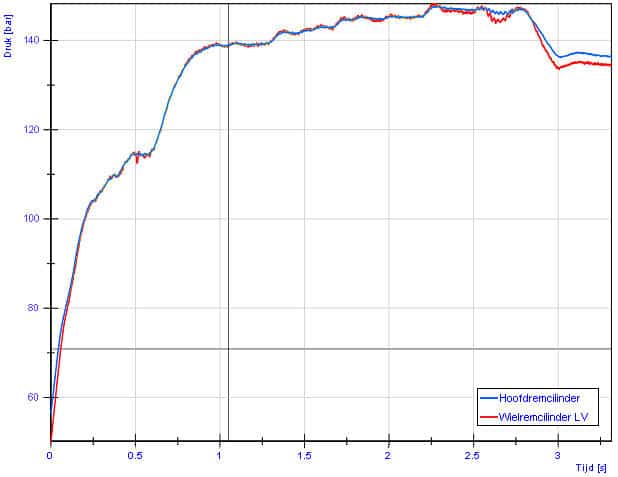
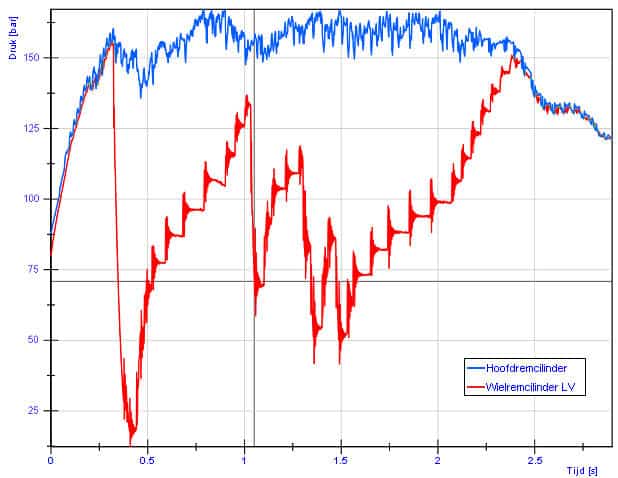
Tekanan pada silinder rem master dibandingkan dengan silinder rem roda dengan ABS:
Dalam situasi di mana ABS beroperasi, tekanan di dalam silinder rem utama dan di dalam silinder rem roda tidak lagi sama. Tekanan pada silinder master rem tetap tinggi karena pengemudi terus menekan pedal rem. Pada grafik garis merah berkurang pada t = 0,3 detik; di sini ABS mengurangi tekanan pengereman. Berkurangnya tekanan rem menyebabkan roda berputar kembali. Dari t = 0,4 detik, tekanan pengereman dinaikkan lagi secara bertahap hingga kecepatan roda sama dengan kecepatan roda lainnya. Hal ini terjadi pada t = 2,35 detik.