Tárgyak:
- Határozza meg és telepítse a motorvezérlő rendszer érzékelőit
- Főtengely helyzet érzékelő
- Impulzuskerék
- Térképérzékelő
- Hűtőfolyadék hőmérséklet érzékelő
- Lambda szonda
Határozza meg és telepítse a motorvezérlő rendszer érzékelőit:
A motorvezérlő rendszerhez számos érzékelő szükséges. Az érzékelők a rendszer „bemeneteként” szolgálnak. Az érzékelők egy fizikai mennyiséget elektromos jellé alakítanak át, amelyet számítógép is feldolgozhat, jelen esetben a MegaSquirt.
A MegaSquirt összeszerelési folyamatánál figyelembe kell venni a motorra szerelendő alkatrészeket, mert a MegaSquirt felépítése eltérő lehet.
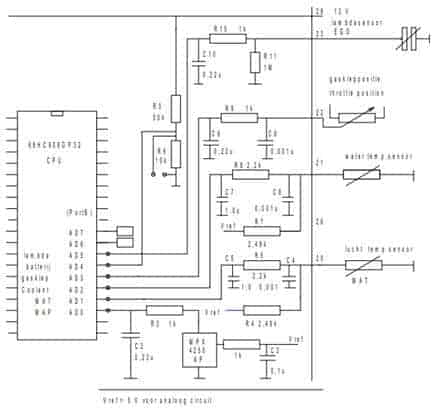
Az ábrán láthatók a különböző érzékelő áramkörök, amelyekben ezek az alkatrészek találhatók. Az ábrán látható bemeneti jelek a lambda érzékelőtől, a fojtószelep helyzetérzékelőtől, a hűtőfolyadék hőmérséklet érzékelőtől és a levegő hőmérséklet érzékelőtől származnak.
A diagram az érzékelőkön kívül számos ellenállást és kondenzátort is tartalmaz. Ezen összetevők összetétele szűrőket képez; Ezek a szűrők az interferencia jelek és a zaj rögzítésére szolgálnak. Ha az érzékelő jelét zaj torzítja, az komoly következményekkel járhat a hajtóművek vezérlésére, így a motor működésére is.
Főtengely helyzet érzékelő:
A motorvezérlő rendszer fontos inputja a főtengely fordulatszáma.
A főtengely fordulatszámának mérése főtengely helyzetérzékelővel és impulzuskerékkel történik. A főtengely helyzetérzékelőjének két fontos funkciója van:
- A főtengely fordulatszáma a jel frekvenciája alapján határozható meg;
- Az impulzuskerékben lévő hiányzó fog a főtengely helyzetét jelzi, amelyben az 1. és 4. henger dugattyúi néhány fokkal a TDC előtt vannak.
A motor fordulatszáma befolyásolja az injektorok és a gyújtás szabályozását. A 36-1 impulzuskerékben lévő hiányzó fog fontos a gyújtási és befecskendezési idők meghatározásához. Úgy döntöttek, hogy Hall-érzékelőt és nem indukciós impulzusgenerátort használnak sebességérzékelőként. Az induktív érzékelő váltakozó feszültséget állít elő, amelyet a MegaSquirt vezérlőben egyenfeszültséggé kell alakítani. A Hall-érzékelő négyszöghullám-feszültséget hoz létre, amelyet belső vagy külső felhúzó ellenállással 5 vagy 12 voltos feszültségre erősítenek fel. Ezáltal a Hall-érzékelő alkalmasabb megbízható jel létrehozására. Ezt a választást előre meg kell tenni a MegaSquirt összeszerelése előtt; mindkét érzékelő eltérő áramkör-konstrukciót igényel.
Impulzuskerék:
A főtengely helyzetérzékelője a motorra szerelt impulzuskerék légrésének változását méri. A Land Rover motorja azonban eredetileg nem rendelkezik főtengely helyzetérzékelővel, ezért nincs impulzuskerék sem. Az impulzuskereket ezért utólag kellett felszerelni. Sokat gondolkodtak az impulzuskerék elhelyezkedésén és helyzetén. A lehetőségek a következők voltak:
- 36 fogú tárcsa, amely a főtengely szíjtárcsájának külső oldalára van rögzítve bilinccsel vagy csavarkötéssel.
- Az aktuális főtengely-tárcsa beállítása fogak marásával a szíjtárcsáról.
Gyakori a 36-1-es vagy 60-2-es impulzuskerék használata. A 60 fogú impulzuskerék főként nagyobb átmérőkhöz használatos. A 36-1 fogszélessége miatt használatra alkalmas. Nagyon fontos, hogy az impulzuskeréknek a lehető legkisebb magassági mozgása legyen. A magasságváltozás az érzékelő és az impulzuskerék fogai közötti mágneses tér megváltozását jelenti. Ez káros következményekkel járhat a motor működésére nézve. Ezt természetesen meg kell akadályozni. Ezért előnyösebb volt az aktuális főtengely-tárcsa beállítása. A meglévő főtengely-tárcsa külső éle marógépen van megmunkálva. Az anyag eltávolításával bevágásokat alakítottak ki. A fennmaradó 36 fog arra szolgál, hogy az érzékelő mérni tudja a mágneses mezők változásait. Egy fogat lecsiszoltak a referenciaponthoz. Az alábbi képen a megmunkált főtengely szíjtárcsa látható.
A köszörült fog az impulzuskerék tetején, közvetlenül az érzékelő alatt látható. Ha a főtengely ebben a helyzetben van, ez nem azt jelenti, hogy az 1. és 4. henger dugattyúi a TDC-ben vannak, hanem azt, hogy ezek a dugattyúk 90 fokkal a TDC előtt vannak, ami 9 fognak felel meg (360/36). Abban a pillanatban, amikor a hiányzó fog elhalad, a MegaSquirt jelet kap, hogy hamarosan meg kell gyújtani. Ettől kezdve a rendszer kiszámítja, hogy mikor kell aktiválni a gyújtótekercset. Változó üzemi feltételek mellett az előgyújtás idejét is ez a referenciapont határozza meg.

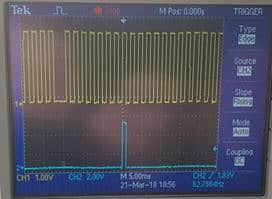
Az oszcilloszkóp képe (lásd a képet) a főtengely jelét (fent) mutatja a gyújtótekercs vezérlőjeléhez (alul) képest. A gyújtótekercs vezérlő impulzusa a hiányzó fog után a nyolcadik fognál jön létre. Amikor a motor alapjáraton jár, a gyújtást 10 fokkal előretolja, ami 1 fogat jelent. Ez az eltávolított fog és a tényleges felső holtpont közötti 90 foknak (9 fog) felel meg.
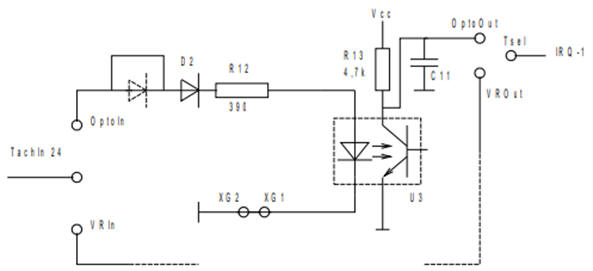
A MegaSquirt Hall-érzékelő áramkörének összeszereléséhez a C11 kondenzátort, az R12 és R13 ellenállásokat, a D2 diódát és az U3 optocsatolót kell felszerelni (lásd az alábbi ábrát). A Hall-érzékelő jele a 105. ábrán az „Opto in” alatti diagramon jelenik meg. A jel a diódán és az ellenálláson keresztül érkezik az úgynevezett optocsatolóhoz. Ezt a komponenst szaggatott vonal jelzi. Az optocsatoló egy kis integrált áramkör, amelyben a bal oldali LED világításakor a jobb oldali fototranzisztort vezeti. Az optocsatoló kapcsolónak tekinthető, anélkül, hogy a vezérlő és a kapcsoló részek között mechanikus vagy elektromos csatlakozások lennének.
Amikor az optocsatolóban lévő tranzisztor vezet, kis áram áramolhat a Vcc-ről a földre. Ebben a pillanatban 0 voltos feszültség van az „Opto Out”-on. Ha a tranzisztor nem vezet, akkor nincs áram, és ezért nincs feszültségesés az R13 ellenálláson. Az „Opto out” feszültsége ekkor 5 volt.
Optocsatoló segítségével galvanikus elválasztás történik a dióda és a fototranzisztor között. A veszélyes zavaró feszültségek így kimaradnak a mikrokontroller áramköréből, mivel az áttörési feszültség általában nagyobb, mint 5 kV.
MAP érzékelő:
Egy MAP érzékelő (Manifold Absolute Pressure sensor) méri a nyomást a szívócsőben. A MegaSquirt ezt a nyomást, a motor fordulatszámát és a bemeneti hőmérsékletet használja a motorba belépő levegő mennyiségének kiszámításához. A Land Rover motorral abszolút nyomást (a külső levegő nyomását) vagy negatív nyomást mér a rendszer. Ez egy szívómotor, amely a saját levegőjét szívja be. A turbóval felszerelt motoroknak meg kell küzdeniük a szívócső túlnyomásával. A MAP érzékelő mérési tartománya általában 0,2 és 1.1 bar között van.
A szívócsonkban lévő nyomás a fojtószelep nyitási szögével (amelyet a fojtószelep helyzetérzékelővel mérünk) és a motor fordulatszámával együtt meghatározhatja a motor terhelését. A MAF érzékelő (Manifold Air Flow) hiánya miatt a beszívott levegő mennyiségét a motor adatai és a szívócsőben lévő negatív nyomás alapján számítják ki. Úgy döntöttek, hogy nem használnak MAF-érzékelőt, mert a jel kevésbé megbízható, mivel nem a motorhoz tervezték. A beállításokat a szívócső tulajdonságaihoz igazítani bonyolult. Ehhez sok korrekciós tényező szükséges.
A használt MPX4250AP MAP érzékelő az ábrán látható. A MegaSquirt áramköri lap alapkivitelben rendelkezik csatlakozási lehetőségekkel az ilyen típusú MAP érzékelőkhöz. Ezt az érzékelőt is alapfelszereltségként tartalmazza az építőkészlet. A befecskendezett üzemanyag mennyisége többek között a jelenlévő levegő mennyiségétől is függ, mert sztöchiometrikus keverési arányt próbálnak elérni (14,68 kg levegő 1 kg üzemanyaghoz). Lehetőség volt arra, hogy ne használja a MAF és a MAP érzékelőket. A beszívott levegő mennyiségét ezután az úgynevezett alfa-N szabályozás szerint határoznák meg. Figyelembe veszi a gázszelep helyzetét, ami a jelenlévő levegő mennyisége szempontjából meghatározó. Ez azonban kevésbé pontos, mint a MAP érzékelő, ezért nem ezt választották. Ebben a projektben a fojtószelep helyzetérzékelőjét csak a gyorsulás dúsítására használják.

Hűtőfolyadék hőmérséklet érzékelő:
A klasszikus beállításban nincsenek hőmérséklet-érzékelők a motorblokkon. A motor alapfelszereltsége bimetál van, amelynek az a funkciója, hogy felkapcsolja a műszerfal világítását, ha a hűtőfolyadék hőmérséklete túl magas. Mivel a motorvezérlő rendszer figyelembe veszi a hűtőfolyadék és a beszívott levegő hőmérsékletét, az NTC ellenállások utólagos felszerelése mellett döntöttek. Az NTC ellenállás negatív hőmérsékleti együtthatóval rendelkezik. Ez azt jelenti, hogy az ellenállás értéke a hőmérséklet emelkedésével csökken. A kiválasztott hűtőfolyadék-hőmérséklet-érzékelő olyan érzékelő, amelynek ellenállása 2,5⁰ Celsius mellett 25 kiloohm. Az ellenállásváltozás a legfontosabb hőmérsékleti tartományban a legnagyobb. A megfelelő hőmérséklet kiszámításához fel kell térképezni az NTC ellenállás tulajdonságait.
Az ellenállásváltozás a legnagyobb a 0°C és 60°C közötti hőmérséklet-tartomány változása esetén. Ez látható a jellemző lefolyásából; az említett hőmérsékleti tartományban kb. 5kΩ-os ellenálláscsökkenés tapasztalható, míg T ≥ 60⁰C mellett az ellenállás alig csökken. Egyes esetekben kívánatos a 60°C feletti hőmérséklet mérése is. Ennek lehetővé tétele érdekében a belső előfeszítési ellenállást át lehet kapcsolni egy bizonyos hőmérsékleten eltérő értékű előfeszítő ellenállásra. Ez két NTC-karakterisztikát eredményez. Ebben a projektben azonban a hűtőfolyadék hőmérsékletét kizárólag a hidegindítási dúsításhoz használják, amit 60°C felett alig használnak.
Az alacsony hőmérséklet is a legérdekesebb; itt történik a hidegindítási dúsítás; az injektor hosszabb ideig aktív, ha a motor hideg. Amikor a motor kellőképpen felmelegedett (T ≥ 60⁰C), egyre kevesebb dúsítás megy végbe. T = 90°C-tól a befecskendezési stratégia a referenciamezőben beállított értékek szerint fut. A referenciamező egy alapértelmezett megadott érték. A külső tényezők, mint például a hidegindítási dúsítás alacsony hőmérsékleten, korrekciós tényezőt képeznek ehhez a standard értékhez. A MegaSquirt már nem veszi figyelembe a hűtőfolyadék hőmérsékletét.
Lambda érzékelő:
A kipufogóba lambda érzékelő (érzékelő) van szerelve, amely méri a kipufogógázok levegő/üzemanyag arányát. A lambda-szenzornak fontos feladata, hogy egy későbbi szakaszban „beállítsa” a motorvezérlést az AFR és VE táblázatok kitöltésével. Ahhoz, hogy betekintést nyerjünk az ideális keverési arányba és a dúsítás vagy szegényítés hasznosságába és szükségességébe, először meghatározzuk a sztöchiometrikus keverési arányt, a dúsítást és a kimerítést.
A sztöchiometrikus keverési arány a levegő és az üzemanyag arányát jelzi, amelyben a levegőből származó összes oxigént felhasználják. Ez a helyzet a 14,68:1 aránynál (kerekítve: 14,7 kg levegő 1 kg benzinhez). Ekkor λ = 1-ről beszélünk.
A lambda-érték eltérő működési körülmények között változhat:
- Dúsítás: λ < 1;
- Elszegényít: λ > 1.
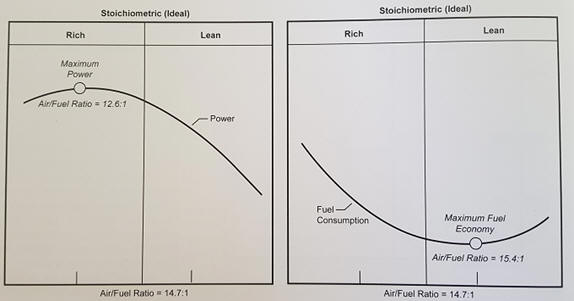
A λ = 0,8-ra dúsítás azt jelenti, hogy 11,76 kg levegő és 1 kg benzin keverési aránya érvényes. Így kevesebb levegő áll rendelkezésre 1 kg üzemanyag elégetéséhez. A keverék dúsításának vagy kimerítésének mindig a robbanási határokon belül kell maradnia. A dúsítás akkor történik, amikor a motornak nagyobb teljesítményt kell leadnia. A gazdagabb keverék hűtést is biztosít. A sovány keverék viszont jobb üzemanyag-fogyasztást biztosít. Az alábbi képen két grafikonon látható a maximális teljesítmény és a legalacsonyabb üzemanyag-fogyasztás.
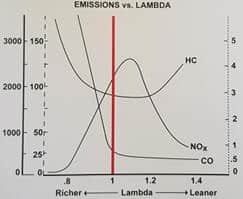
A lambda érték nemcsak a teljesítményt és az üzemanyag-fogyasztást, hanem a kipufogógáz-kibocsátást is befolyásolja. A gazdagabb keverék alacsonyabb NOx-tartalmat, de magasabb CO- és HC-kibocsátást is biztosít. A soványabb keveréknél az üzemanyag részecskék távolabb helyezkednek el egymástól, így az égés már nem optimális; ennek eredményeként a HC-kibocsátás is nő. Az alábbi képen a lambda értékhez kapcsolódó károsanyag-kibocsátás látható. Katalizátor használatakor kívánatos biztosítani, hogy a befecskendezés folyamatosan váltakozzon a dús és a sovány között. Gazdag keverékben oxigénhiány következtében CO képződik, amellyel a katalizátor csökkenti az NOx-ot. A sovány keverék oxigéntöbbletet tartalmaz, ami oxidálja a CO-t és a HC-t.
Kétféle lambda-érzékelő létezik; az ugrásérzékelőt és a szélessávú érzékelőt. A MegaSquirt mindkét típust támogatja. A VE táblázat beállításakor azonban az ugrásérzékelő nem megfelelő, ezért a szélessávú érzékelő használata mellett döntöttek. A VE táblázat beállítása a VE értékeknek a mért AFR-hez való igazításával történik. Bár a VE értékek elvileg számításokkal és nagyrészt a nyomatékgörbén alapulva megadhatók, az AFR gyorsan túllép az ugrásérzékelő tartományán. A széles sávú érzékelő megoldást kínál a nagy mérési tartománya miatt; 8,0 és 1,4 közötti AFR-t képes mérni. A keverék összetétele szinte minden esetben ebben a mérési tartományban lesz járó motornál, így a szélessávú szenzor alkalmas a VE táblázat beállítására. A hangolás a szélessávú érzékelő nélkül gyakorlatilag lehetetlen.
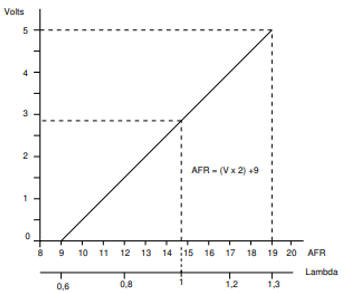
A MegaSquirt nem rendelkezik belső lambda vezérlővel. Ha a szélessávú érzékelő tulajdonságai ismertek, akkor a TunerStudio programban egy táblázatba beírhatók. Más esetekben szélessávú érzékelőre van szükség külső vezérlővel. A kimeneti feszültséget a külső vezérlő lineárissá tette. A vezérlő és a MegaSquirt kimeneti feszültsége 0 és 5 volt között van, a lambda érték és a feszültség közötti kapcsolat lineáris. A feszültségértéket lambda értékké alakítja át a MegaSquirt. Az ábra a grafikont mutatja a lineáris gradienssel.
következő: Működtetők.