Tárgyak:
- bevezetés
- AC villanymotor (szinkron, állandó mágnessel)
- A szinkronmotor AC vezérlése
- AC villanymotor (aszinkron, mókusketreces motor)
- A szinkron és aszinkron villanymotor hatásfoktérképe
Bevezetés:
Elektromos motort használnak hibrid vagy teljesen elektromos járművek vezetésére. Az elektromos motor (az akkumulátorból vagy a hatótávolság-növelőből származó) elektromos energiát mozgássá alakítja a kerekek hajtásához. Ezenkívül a villanymotor a motor fékezése során a mozgási energiát elektromos energiává is tudja alakítani: regeneratív fékezés. Ebben az esetben az elektromos motor dinamóként működik. E két funkció miatt az elektromos motort „elektromos gépnek” is nevezzük.
Az elektromos motor hibrid járműbe történő elhelyezésének lehetőségei a következők:
- A belső égésű motoron, ahol az átvitel többszíjjal vagy közvetlenül a főtengelyen keresztül történik;
- A motor és a sebességváltó között: a sebességváltó bemenő tengelyét a villanymotor hajtja;
- A sebességváltóba integrálva;
- A differenciálműnél;
- A kerékagyoknál (agy motor).
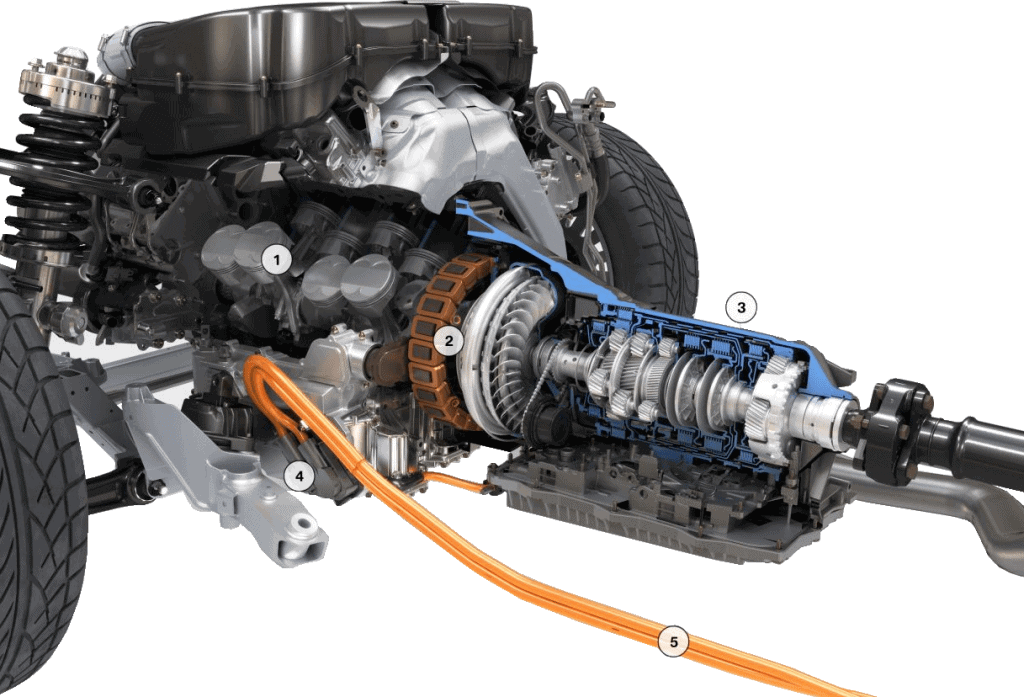
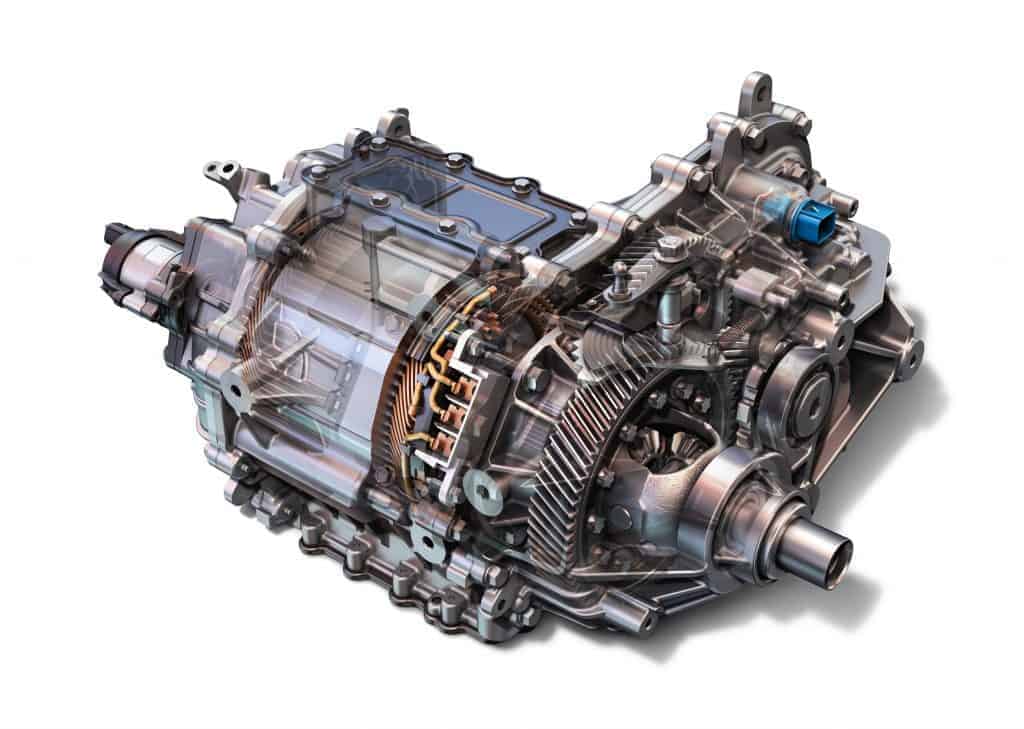
A teljesen elektromos autók villanymotorját gyakran a hátsó tengelyre szerelik fel. Az alábbi képen az elektromos motor látható inverterrel egy Tesla hengeres házában és véghajtásában.

AC villanymotor (szinkron, állandó mágnessel):
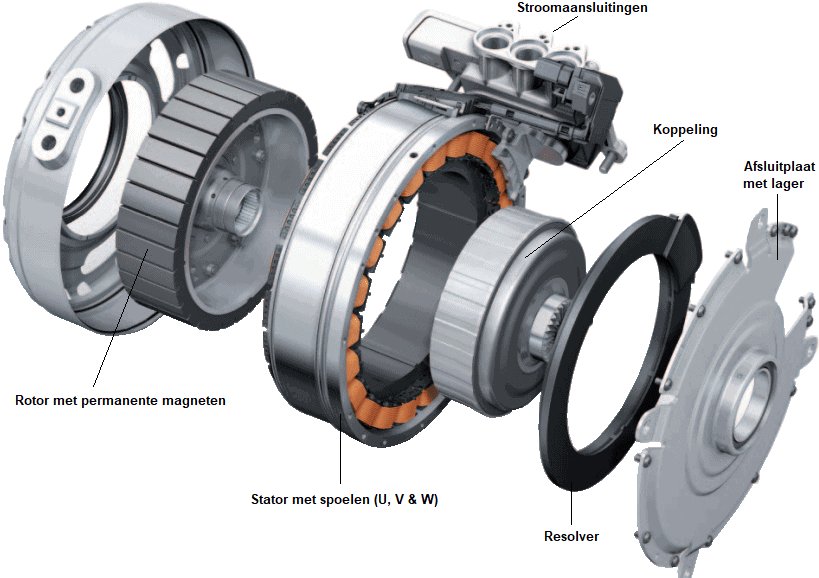
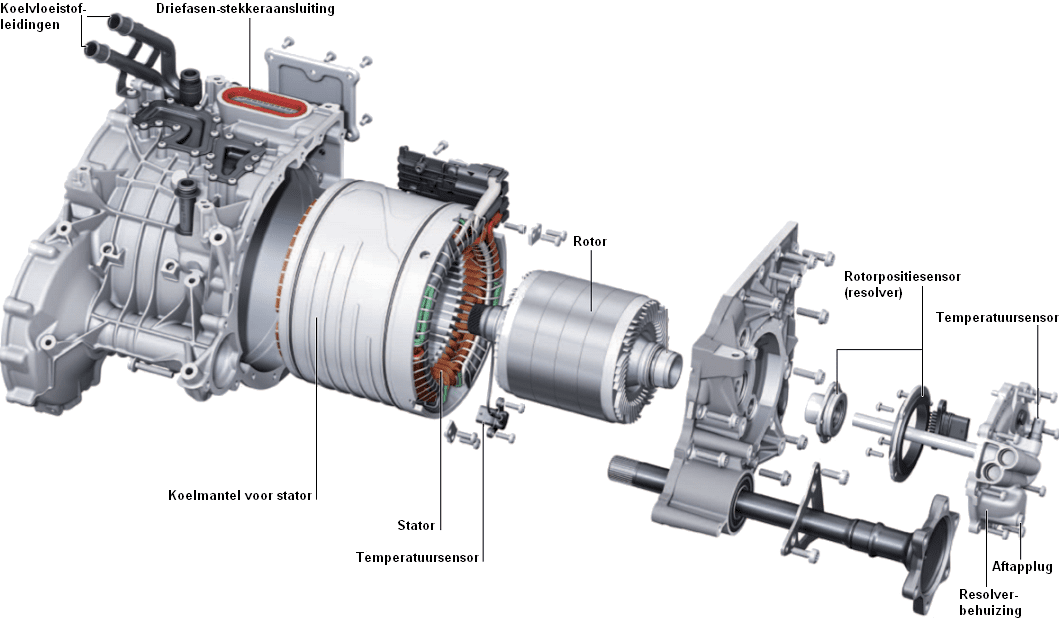
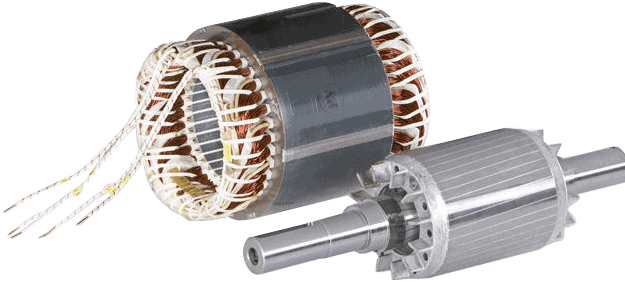
A következő képen egy Audi (szinkron) villanymotor alkatrészei láthatók. Ezt a típust az A6 és A8 hibrid változataiban használják. Röviden felsoroljuk az összetevőket. Ezeket az összetevőket részletesen ismertetjük a következő bekezdésekben.
Az állandó mágnesekkel ellátott forgórész az állórész mágneses mezőjének megváltozása következtében forogni kezd. A forgórész a tengelykapcsolóhoz van csatlakoztatva, amely különböző üzemi körülmények között csatlakoztathatja vagy leválaszthatja a belső égésű motort és a villanymotort (egy tengelykapcsolóval együtt (nincs ábrázolva)). A forgórész helyzetét a rezolverkábel mérve: ezek az adatok fontosak az IGBT meghajtóknak az állórész tekercsek megfelelő időben történő vezérléséhez.
Az állandó mágneses villanymotor DC (egyenfeszültség) és AC (váltakozó feszültség) segítségével is vezérelhető.
A szinkronmotor az egyik leggyakrabban használt elektromos motor a hibrid vagy teljesen elektromos járművekben. Az ilyen típusú villanymotor egy tekercses állórészből és egy több állandó mágnessel ellátott rotorból áll. A forgórész ugyanolyan sebességgel forog, mint az állórész mágneses tere. A szinkronmotor a következőképpen vezérelhető:
- AC: szinuszos jel (váltakozó áram) vezérlése.
- DC: négyzetes vagy trapéz alakú jellel vezérelhető (egyenáram)
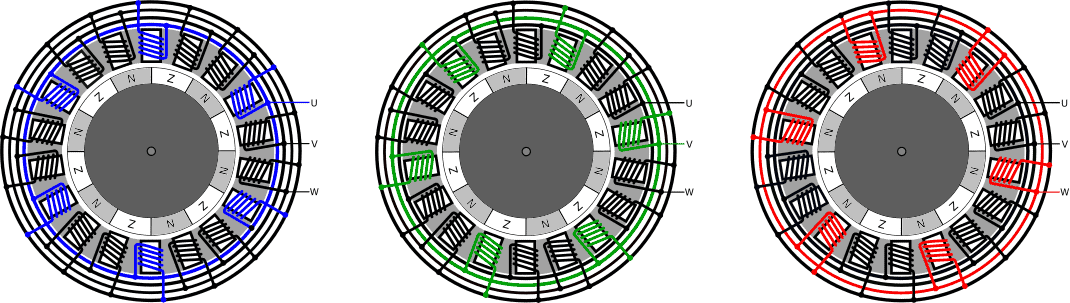
A szinkronmotor állórésze három állórész tekercscsoportból áll: U, V és W. Mindegyik csoport három, hat párhuzamosan kapcsolt tekercset tartalmaz, amelyek az állórész teljes kerületén vannak elosztva. Minden harmadik tekercs ugyanabba a sorozatba tartozik.
- U-tekercsek: kék
- V-tekercsek: zöld
- W tekercsek: piros
A rotor több állandó mágnest tartalmaz. Az állórészben lévő tekercsek váltakozó feszültség alá helyezésével forgó mágneses mező jön létre. A rotor követi a forgó mezőt, ezért forog.
A szinkronmotor AC vezérlése:
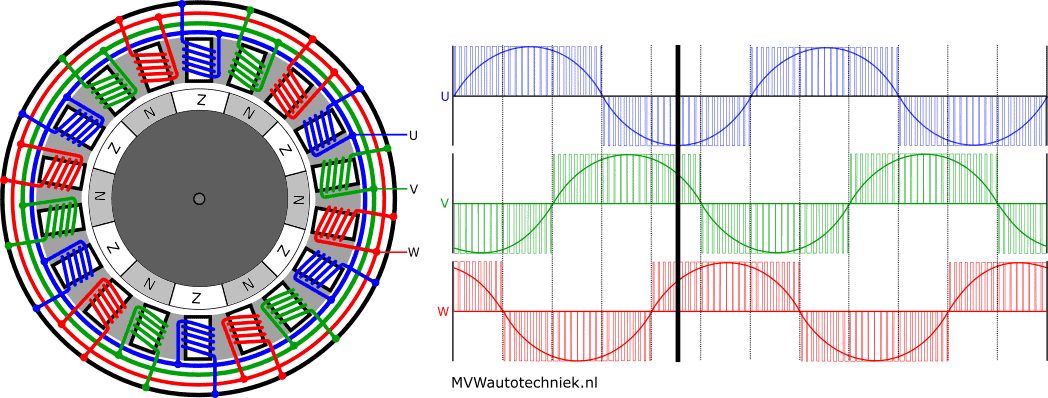
Az AC vezérlés frekvenciavezérelt vezérlést vagy szinuszos kommutációt használ. Az állórész tekercseit váltakozó háromfázisú szinuszos feszültséggel látják el a forgórész forgatásához.
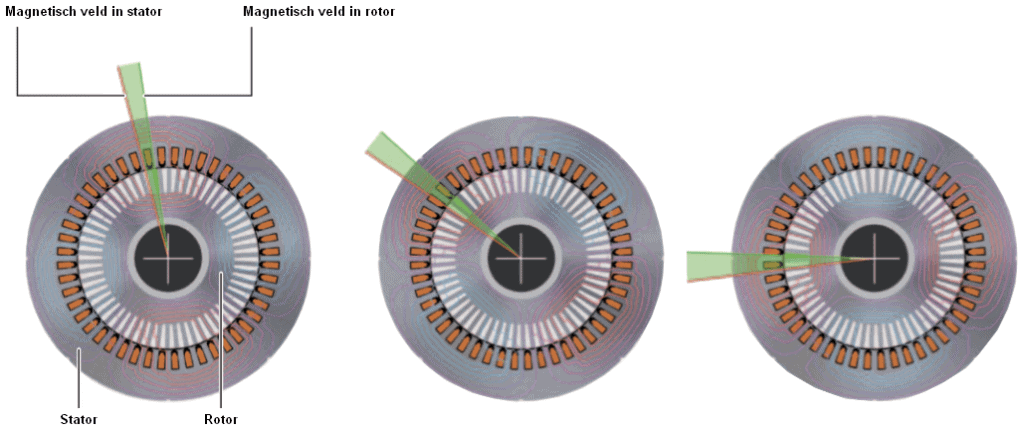
Az alábbi képen a rotor helyzete látható maximálisan gerjesztett U-tekerccsel. A mágneses tér hatására az északi pólusok közvetlenül a feszültség alatt álló U-tekercsekkel szemben helyezkedtek el. A grafikonon az elektromotor melletti kurzor jelzi a tekercsek vezérlését az adott pillanatban.
Tájékoztatásul: a magyarázatban szereplő forgórész az állórész tekercseinek vezérlésekor forog óramutató járásával megegyező.
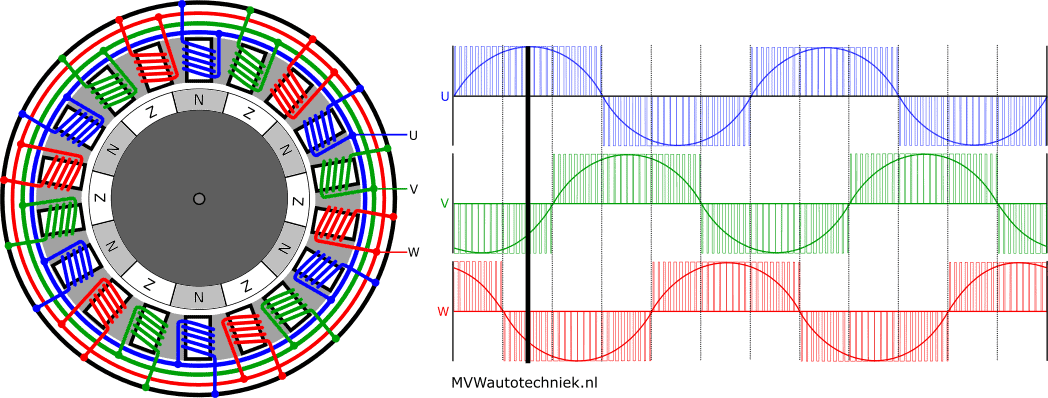
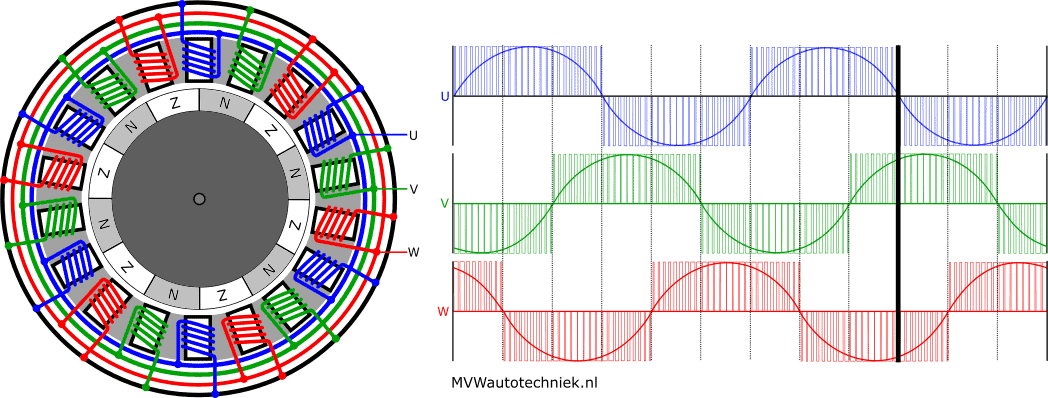
A következő képen a szinuszhullám, azaz az U-tekercsen áthaladó váltóáram maximálisan negatív. Ennél a szabályozásnál a forgórész déli pólusai közvetlenül szemben vannak a feszültség alatt álló (U) állórész tekercsekkel.
Valójában egy kis légrés van a rotor északi és déli pólusa között. A déli pólusról az északi pólusra történő váltás során az U-tekercsben az áram iránya megváltozik. További:
- A V-tekercsen áthaladó áram (zöld) majdnem maximálisan pozitív; az északi pólus is csaknem szemben van a tekercssel.
- A W tekercsen áthaladó áram maximálisan negatív volt, és növekszik. A déli pólus elfordult a tekercsen.
Az alábbi animáció a forgórész váltóáram miatti forgását mutatja, hogy benyomást keltsen az áram folyásáról.
AC villanymotor (aszinkron, mókuskalitkás motor):
A mókusketrec vagy rövidzárlatos armatúra villanymotor aszinkron motor. Az állandó mágneses szinkronmotor és az aszinkron motor közötti különbség a forgórészben van: ez egy lágyvas dob, hosszanti vezetőkkel. A forgórész az állórésszel aszinkron módon fut, ami azt jelenti, hogy fordulatszám-különbség van a forgórész és az állórész mágneses fordulatszáma között. Az állórész pontosan ugyanaz.
Az aszinkron villanymotor forgórésze rövidre zárt tekercsekből áll; az U, V és W tekercsek az egyik oldalon csatlakoznak egymáshoz. Amikor a forgórész az állórész forgó mezőjében van, a forgórész tekercseiben indukciós feszültség jön létre. Mivel a rotor tekercsei rövidre vannak zárva egymással, áram folyik rajtuk. Ez az áram arra készteti a forgórészt, hogy mágneses teret hozzon létre, ami nyomatékot hoz létre. Mivel az aszinkron villanymotor működése az indukció törvényén alapul, aszinkron motornak is nevezzük.
A leadott nyomaték befolyásolja az állórészben lévő forgó mágneses tér és a forgórész fordulatszáma közötti csúszást.
Az aszinkron motornak számos előnye és hátránya van a szinkronmotorhoz képest.
Előnyei:
- viszonylag egyszerű, robusztus és olcsó rotor;
- nagy nyomaték alacsony fordulatszámon.
hátránya:
- kisebb teljesítménysűrűség (tömegenként) és hatékonyság (hatékonyság). A rövidre zárt rotortekercsekben lévő áramok további rotorveszteséget okoznak;
- a sebességet nem lehet pontosan szabályozni, mert a terheléstől függ. Ez önmagában nem jelent hátrányt: jó vezérléssel az aszinkron motor fordulatszáma is állítható;
- nagy indítóáram.
Az aszinkron motor forgórészének helyzetét és fordulatszámát a rotor helyzetérzékelő. A Hall-érzékelők gyakran legalább négy impulzust biztosítanak a forgórész fordulatánként a forgórész helyzetének és sebességének továbbítására. Az ilyen típusú rotor helyzetérzékelőt nem nevezzük rezolvernek, mint a szinkronmotornál.
A szinkronmotorral ellentétben a forgórész helyzetérzékelője nem szükséges a forgórész álló helyzetének ismeretéhez. A forgás során fontos a rotor helyzete: ügyelni kell arra, hogy a mágneses forgótér és a rotor közötti csúszás ne legyen túl nagy. Ha a forgó mező túl gyorsan mozog, akkor olyan helyzet állhat elő, amikor a rotor hirtelen a másik irányba akar fordulni. A fellépő erők katasztrofálisak lehetnek a mechanikai és elektromos alkatrészekre nézve.
Egyes gyártók az aszinkron motor használatát is választják rezolverkábel jelentkezését. Az ok számomra ismeretlen. Mindenesetre a rezolver rendkívül pontos mind álló helyzetben, mind futás közben, ami a precíz irányításnak előnyös lehet.
A szinkron és aszinkron villanymotor hatásfoktérképe:
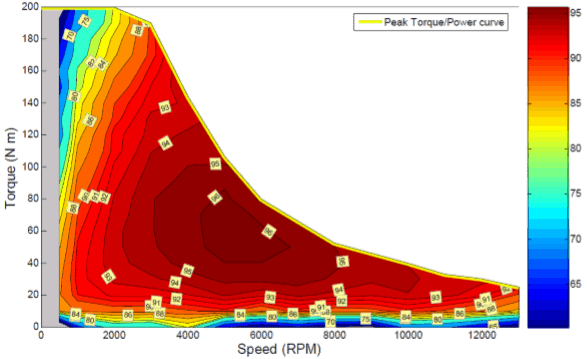
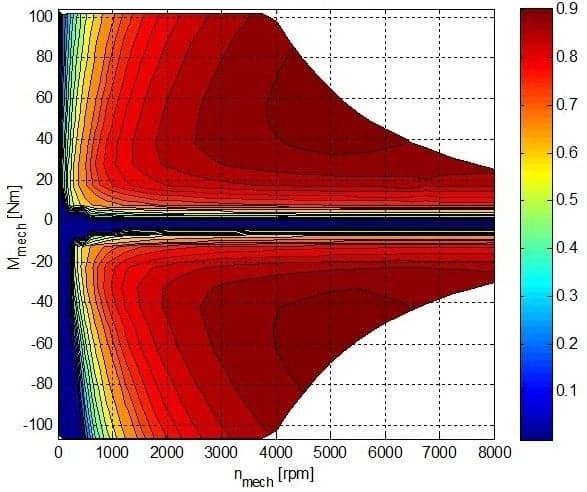
Az alábbi képeken a szinkron villanymotor (balra) és az aszinkron villanymotor (jobbra) hatásfoka látható.
- A szinkron villanymotor nagyon hatékony. A hatásfok nagy területen 90% feletti, a csúcsértékek akár 96%. 2000 ford./perctől a mező gyengül, aminek következtében a maximális nyomaték csökken.
- Az aszinkron motor hatásfoka lényegesen alacsonyabb, mint a szinkronmotor alacsonyabb fordulatszámon.
Kapcsolódó oldalak: